配准是点云处理中的一个基础问题,众多学者此问题进行了广泛而深入的研究,也出现了一系列优秀成熟的算法,在三维建模、自动驾驶等领域发挥着重要的作用。
本文主要介绍粗配准NDT (Normal Distribution Transform) 与 精配准ICP (Iterative Closest Point)两种经典算法。
NDT (Normal Distribution Transform)点云配准
在去年曾经对NDT原理进行了简单总结,大家可以参考链接:点云配准NDT (P2D)算法详解。
ICP (Iterative Closest Point)点云配准
参考:
基于SVD求解 3D-3D 点对匹配
该如何学习三维点云配准的相关知识?
ICP是经典的精配准算法,其以“点”为配准基元,不断迭代求得最优的位姿,最终使得目标函数最小。
点云集合
假设存在两个点云集合,
目标点云 (target cloud ):P={p1,p2,p3,...,pn}P=\{p_1, p_2, p_3,..., p_n\}P={p1,p2,p3,...,pn}
源点云 (source cloud):Q={q1,q2,q3,...,qn}Q=\{q_1, q_2, q_3,..., q_n\}Q={q1,q2,q3,...,qn}
两者叠加显示:
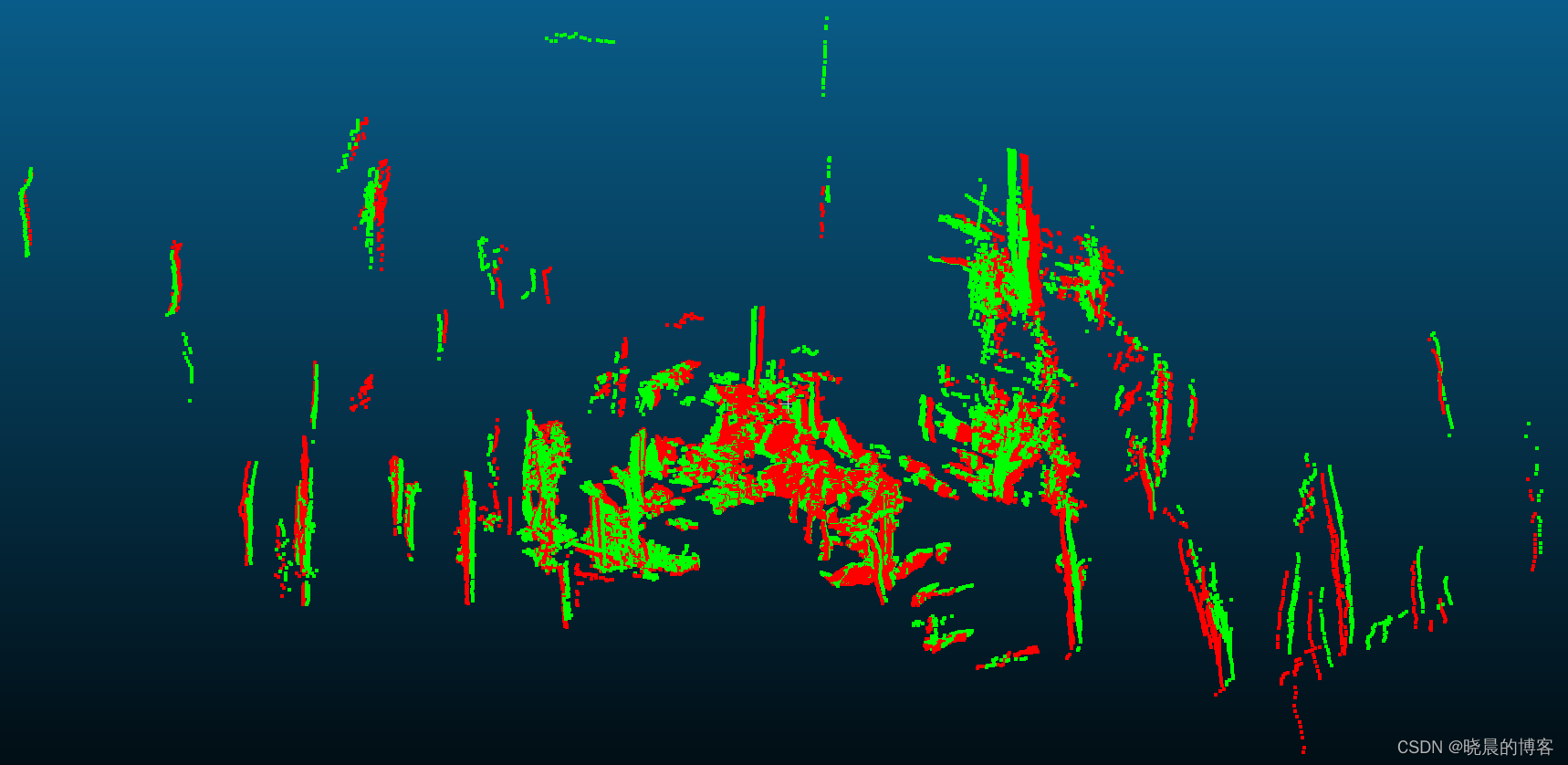
可以看到上图中的两帧点云之间存在一个偏差,这个偏差需要一个位姿变换(R,t)(R, t)(R,t)进行转换。
构造目标函数
ICP算法则希望得到一个最优的位姿变换(R∗,t∗)(R^*, t^*)(R∗,t∗)使得下式目标函数最小:
f(R∗,t∗)=MIN(1Np∑i=1Np∣pit−(R∗qis+t∗)∣2)f(R^*, t^*)=MIN(\frac{1}{N_p}{\textstyle \sum_{i=1}^{N_p}\left | p_{i}^{t}-(R^*q_{i}^{s}+t^*) \right |^2 } )f(R∗,t∗)=MIN(Np1∑i=1Np∣pit−(R∗qis+t∗)∣2)
其中NpN_pNp为配对点云个数,pitp_{i}^{t}pit与qisq_{i}^{s}qis是目标点云与源点云中的一对配对点。
寻找对应点对
起始步骤中,我们只有一系列无序的三维点,并没有对应的pitp_{i}^{t}pit与qisq_{i}^{s}qis点对。ICP中定义了“最近邻点”的定义。
- 使用一个初始位姿(R0,t0)(R^0, t^0)(R0,t0)对源点云QQQ进行变换,得到一个变换后的点云Q′Q'Q′。
- 对变换后的点云Q′Q'Q′中的点qi′q_{i}^{'}qi′在目标点云中查找最近邻点pjp_{j}pj,如果两点之间的距离小于预先设置的阈值,则认为点qi′q_{i}^{'}qi′与点pjp_{j}pj为对应的点对。
优化位姿变换(R,t)(R, t)(R,t)
找到所有合理的最近邻点对之后,则每一个点对都可以构建一个函数(每个点对类似于一个观测),而待求变量(R,t)(R, t)(R,t)只有6个自由度。所以我们有了NpN_pNp个观测,6个待求变量。使用最小二乘进行优化求解。
这样我们就更新了初始位姿(R0,t0)(R^0, t^0)(R0,t0)为新的(R1,t1)(R^1, t^1)(R1,t1)
迭代优化
得到新的位姿变换(R1,t1)(R^1, t^1)(R1,t1)之后,我们再次回到寻找对应点对步骤中,重新转换源点云QQQ为Q2Q^2Q2,查找Q2Q^2Q2与PPP新的点对。
接着,进行新的 “优化位姿变换(R,t)(R, t)(R,t)” 步骤,重复得到新的优化位姿(R2,t2)(R^2, t^2)(R2,t2)
直到达到迭代停止条件,如:1)达到最大迭代次数,或2)位姿变化量小于阈值,或3)最近邻点对不再变化等则终止迭代。
调用PCL库
参考链接:Interactive Iterative Closest Point
1#include <iostream>2#include <string>34#include <pcl/io/ply_io.h>5#include <pcl/point_types.h>6#include <pcl/registration/icp.h>7#include <pcl/visualization/pcl_visualizer.h>8#include <pcl/console/time.h> // TicToc910typedef pcl::PointXYZ PointT;11typedef pcl::PointCloud<PointT> PointCloudT;1213bool next_iteration = false;1415void16print4x4Matrix (const Eigen::Matrix4d & matrix)17{18 printf ("Rotation matrix :\n");19 printf (" | %6.3f %6.3f %6.3f | \n", matrix (0, 0), matrix (0, 1), matrix (0, 2));20 printf ("R = | %6.3f %6.3f %6.3f | \n", matrix (1, 0), matrix (1, 1), matrix (1, 2));21 printf (" | %6.3f %6.3f %6.3f | \n", matrix (2, 0), matrix (2, 1), matrix (2, 2));22 printf ("Translation vector :\n");23 printf ("t = < %6.3f, %6.3f, %6.3f >\n\n", matrix (0, 3), matrix (1, 3), matrix (2, 3));24}2526void27keyboardEventOccurred (const pcl::visualization::KeyboardEvent& event,28 void*)29{30 if (event.getKeySym () == "space" && event.keyDown ())31 next_iteration = true;32}3334int35main (int argc,36 char* argv[])37{38 // The point clouds we will be using39 PointCloudT::Ptr cloud_in (new PointCloudT); // Original point cloud40 PointCloudT::Ptr cloud_tr (new PointCloudT); // Transformed point cloud41 PointCloudT::Ptr cloud_icp (new PointCloudT); // ICP output point cloud4243 // Checking program arguments44 if (argc < 2)45 {46 printf ("Usage :\n");47 printf ("\t\t%s file.ply number_of_ICP_iterations\n", argv[0]);48 PCL_ERROR ("Provide one ply file.\n");49 return (-1);50 }5152 int iterations = 1; // Default number of ICP iterations53 if (argc > 2)54 {55 // If the user passed the number of iteration as an argument56 iterations = atoi (argv[2]);57 if (iterations < 1)58 {59 PCL_ERROR ("Number of initial iterations must be >= 1\n");60 return (-1);61 }62 }6364 pcl::console::TicToc time;65 time.tic ();66 if (pcl::io::loadPLYFile (argv[1], *cloud_in) < 0)67 {68 PCL_ERROR ("Error loading cloud %s.\n", argv[1]);69 return (-1);70 }71 std::cout << "\nLoaded file " << argv[1] << " (" << cloud_in->size () << " points) in " << time.toc () << " ms\n" << std::endl;7273 // Defining a rotation matrix and translation vector74 Eigen::Matrix4d transformation_matrix = Eigen::Matrix4d::Identity ();7576 // A rotation matrix (see https://en.wikipedia.org/wiki/Rotation_matrix)77 double theta = M_PI / 8; // The angle of rotation in radians78 transformation_matrix (0, 0) = std::cos (theta);79 transformation_matrix (0, 1) = -sin (theta);80 transformation_matrix (1, 0) = sin (theta);81 transformation_matrix (1, 1) = std::cos (theta);8283 // A translation on Z axis (0.4 meters)84 transformation_matrix (2, 3) = 0.4;8586 // Display in terminal the transformation matrix87 std::cout << "Applying this rigid transformation to: cloud_in -> cloud_icp" << std::endl;88 print4x4Matrix (transformation_matrix);8990 // Executing the transformation91 pcl::transformPointCloud (*cloud_in, *cloud_icp, transformation_matrix);92 *cloud_tr = *cloud_icp; // We backup cloud_icp into cloud_tr for later use9394 // The Iterative Closest Point algorithm95 time.tic ();96 pcl::IterativeClosestPoint<PointT, PointT> icp;97 icp.setMaximumIterations (iterations);98 icp.setInputSource (cloud_icp);99 icp.setInputTarget (cloud_in);
100 icp.align (*cloud_icp);
101 icp.setMaximumIterations (1); // We set this variable to 1 for the next time we will call .align () function
102 std::cout << "Applied " << iterations << " ICP iteration(s) in " << time.toc () << " ms" << std::endl;
103
104 if (icp.hasConverged ())
105 {
106 std::cout << "\nICP has converged, score is " << icp.getFitnessScore () << std::endl;
107 std::cout << "\nICP transformation " << iterations << " : cloud_icp -> cloud_in" << std::endl;
108 transformation_matrix = icp.getFinalTransformation ().cast<double>();
109 print4x4Matrix (transformation_matrix);
110 }
111 else
112 {
113 PCL_ERROR ("\nICP has not converged.\n");
114 return (-1);
115 }
116
117 // Visualization
118 pcl::visualization::PCLVisualizer viewer ("ICP demo");
119 // Create two vertically separated viewports
120 int v1 (0);
121 int v2 (1);
122 viewer.createViewPort (0.0, 0.0, 0.5, 1.0, v1);
123 viewer.createViewPort (0.5, 0.0, 1.0, 1.0, v2);
124
125 // The color we will be using
126 float bckgr_gray_level = 0.0; // Black
127 float txt_gray_lvl = 1.0 - bckgr_gray_level;
128
129 // Original point cloud is white
130 pcl::visualization::PointCloudColorHandlerCustom<PointT> cloud_in_color_h (cloud_in, (int) 255 * txt_gray_lvl, (int) 255 * txt_gray_lvl,
131 (int) 255 * txt_gray_lvl);
132 viewer.addPointCloud (cloud_in, cloud_in_color_h, "cloud_in_v1", v1);
133 viewer.addPointCloud (cloud_in, cloud_in_color_h, "cloud_in_v2", v2);
134
135 // Transformed point cloud is green
136 pcl::visualization::PointCloudColorHandlerCustom<PointT> cloud_tr_color_h (cloud_tr, 20, 180, 20);
137 viewer.addPointCloud (cloud_tr, cloud_tr_color_h, "cloud_tr_v1", v1);
138
139 // ICP aligned point cloud is red
140 pcl::visualization::PointCloudColorHandlerCustom<PointT> cloud_icp_color_h (cloud_icp, 180, 20, 20);
141 viewer.addPointCloud (cloud_icp, cloud_icp_color_h, "cloud_icp_v2", v2);
142
143 // Adding text descriptions in each viewport
144 viewer.addText ("White: Original point cloud\nGreen: Matrix transformed point cloud", 10, 15, 16, txt_gray_lvl, txt_gray_lvl, txt_gray_lvl, "icp_info_1", v1);
145 viewer.addText ("White: Original point cloud\nRed: ICP aligned point cloud", 10, 15, 16, txt_gray_lvl, txt_gray_lvl, txt_gray_lvl, "icp_info_2", v2);
146
147 std::stringstream ss;
148 ss << iterations;
149 std::string iterations_cnt = "ICP iterations = " + ss.str ();
150 viewer.addText (iterations_cnt, 10, 60, 16, txt_gray_lvl, txt_gray_lvl, txt_gray_lvl, "iterations_cnt", v2);
151
152 // Set background color
153 viewer.setBackgroundColor (bckgr_gray_level, bckgr_gray_level, bckgr_gray_level, v1);
154 viewer.setBackgroundColor (bckgr_gray_level, bckgr_gray_level, bckgr_gray_level, v2);
155
156 // Set camera position and orientation
157 viewer.setCameraPosition (-3.68332, 2.94092, 5.71266, 0.289847, 0.921947, -0.256907, 0);
158 viewer.setSize (1280, 1024); // Visualiser window size
159
160 // Register keyboard callback :
161 viewer.registerKeyboardCallback (&keyboardEventOccurred, (void*) NULL);
162
163 // Display the visualiser
164 while (!viewer.wasStopped ())
165 {
166 viewer.spinOnce ();
167
168 // The user pressed "space" :
169 if (next_iteration)
170 {
171 // The Iterative Closest Point algorithm
172 time.tic ();
173 icp.align (*cloud_icp);
174 std::cout << "Applied 1 ICP iteration in " << time.toc () << " ms" << std::endl;
175
176 if (icp.hasConverged ())
177 {
178 printf ("\033[11A"); // Go up 11 lines in terminal output.
179 printf ("\nICP has converged, score is %+.0e\n", icp.getFitnessScore ());
180 std::cout << "\nICP transformation " << ++iterations << " : cloud_icp -> cloud_in" << std::endl;
181 transformation_matrix *= icp.getFinalTransformation ().cast<double>(); // WARNING /!\ This is not accurate! For "educational" purpose only!
182 print4x4Matrix (transformation_matrix); // Print the transformation between original pose and current pose
183
184 ss.str ("");
185 ss << iterations;
186 std::string iterations_cnt = "ICP iterations = " + ss.str ();
187 viewer.updateText (iterations_cnt, 10, 60, 16, txt_gray_lvl, txt_gray_lvl, txt_gray_lvl, "iterations_cnt");
188 viewer.updatePointCloud (cloud_icp, cloud_icp_color_h, "cloud_icp_v2");
189 }
190 else
191 {
192 PCL_ERROR ("\nICP has not converged.\n");
193 return (-1);
194 }
195 }
196 next_iteration = false;
197 }
198 return (0);
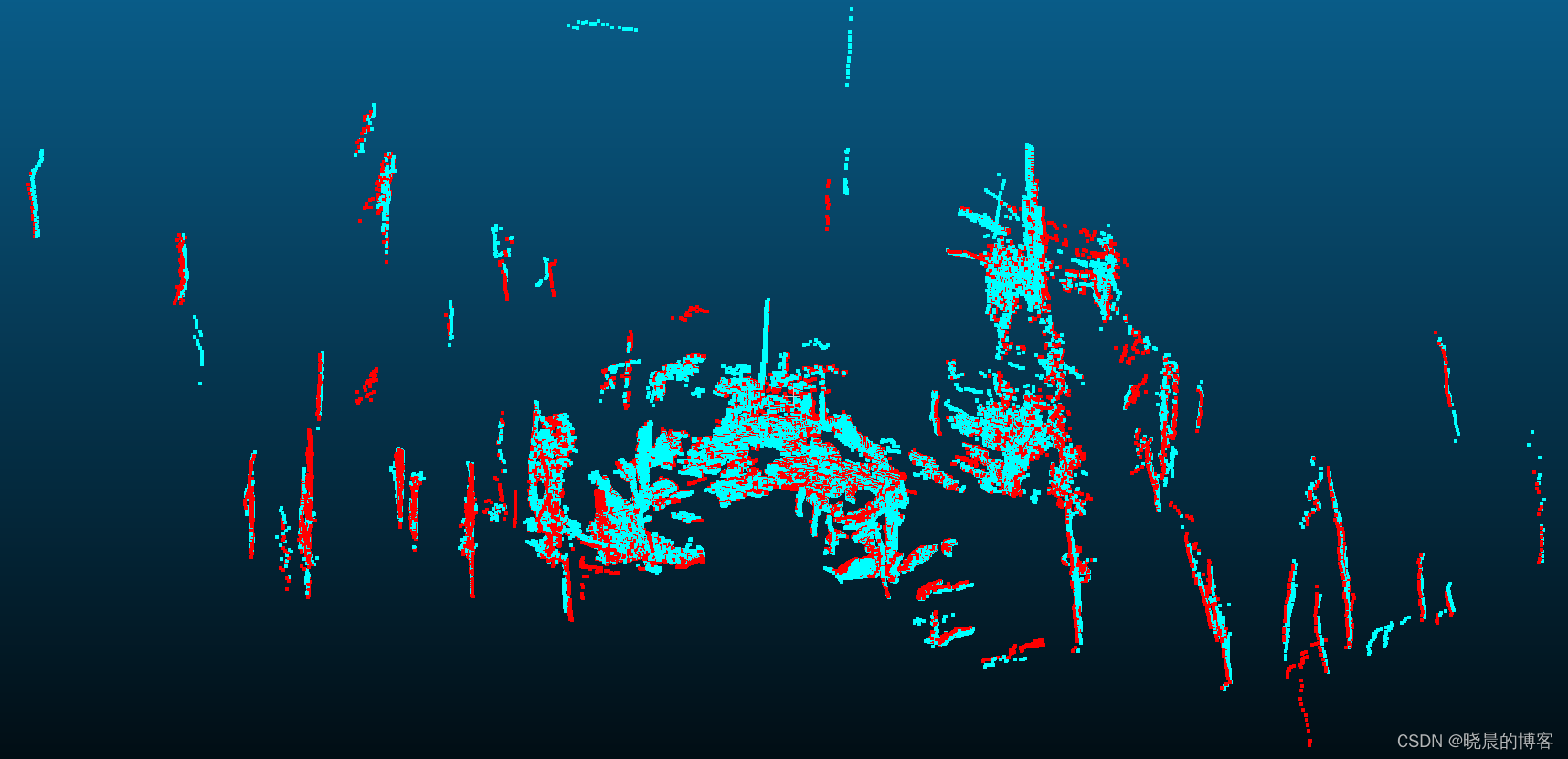
199}配准结果
图中红色为目标帧点云,蓝色为转换后的源点云。
![[python入门㊾] - python异常中的断言](https://img-blog.csdnimg.cn/16caf23859fc4edaa7d57b6b747d0432.png)