第十七章 优先队列优化Dijkstra算法
- 一、普通dijkstra算法的缺陷
- 1、选出最小距离的过程:
- 2、松弛所有点的过程:
- 二、如何优化
- 1、代码模板
- (1)问题:
- (2)模板:
- 2、详细解读
- 三、优化分析
- 1、使用条件:
- 2、常见问题:
- (1)什么样的路径才能进优先队列
- (2)重边的处理
- (3)时间复杂度
一、普通dijkstra算法的缺陷
作者在这里建议,不太懂dijkstra算法的同学可以去看看作者对该算法的详细讲解以及通俗证明,这样大家就能够体会到原算法的缺陷。
传送门:第十六章 Dijkstra算法的讲解以及证明(与众不同的通俗证明)
1、选出最小距离的过程:
int t=-1;for(int j=1;j<=n;j++){if(!s[j]&&(t==-1||dis[j]<dis[t]))t=j;}
我们的dijkstra算法会选出所有松弛后所得距离的最小值。而我们之前的代码是遍历所有点来确定的,时间复杂度是O(N)。那么取出n个最小的点,时间复杂度就是O(N2)。
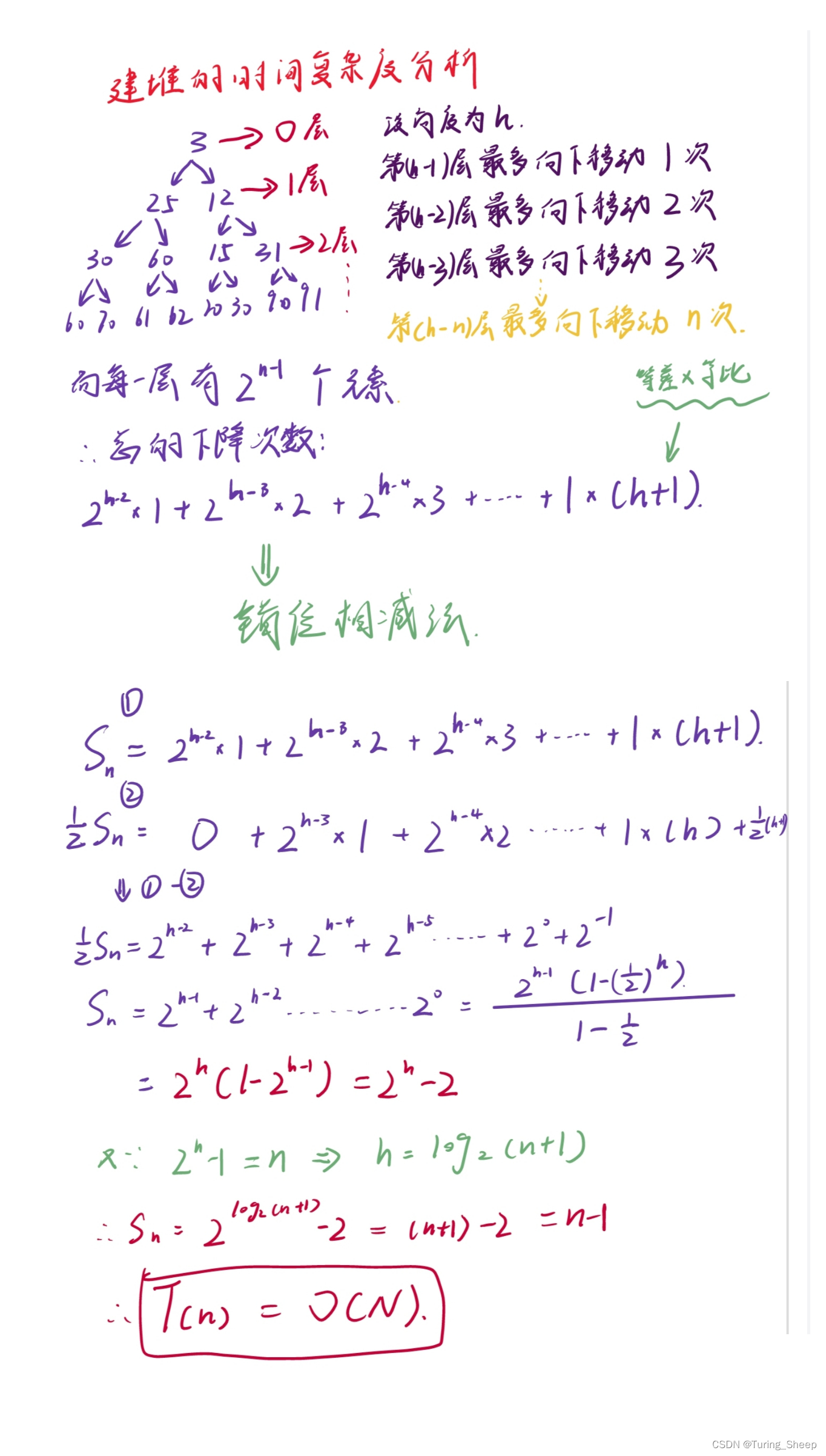
但是我们知道,我们在一堆数中选出一个最小值,只需要使用我们之前学过的数据结构:堆。假设我们选出一个最小值,那么堆选出这个值的时间复杂度是O(logN)。由于我们要求所有的点的最短路,所以我们要取出n个点,那么取出n个点的时间复杂度很多人认为是O(nlogn),其实这是一个很大的误区,因为随着你取出的点的增多,你的堆的高度在减少,那么我们取出n个最小的点需要的时间复杂度是多少呢?
取出n个数的时间复杂度其实就是插入n个数的时间复杂度,并不是nlogn,而是O(N)
推导如下:
数据结构堆就是STL中的优先队列:priority_queue
2、松弛所有点的过程:
for(int j=1;j<=n;j++){dis[j]=min(dis[j],g[t][j]+dis[t]);}
通过我们第十五章对dijkstra算法的证明,我们发现,每次松弛过程得到有效更新的点,都是我们中间点的邻接点。也就是说,我们只需要去松弛该点的邻接点即可,不用去松弛所有点。因此,我们只需要去松弛该点的邻接点。那么这个时候,我们用邻接表就会便于我们去访问了。因为邻接表中将一个点的所有邻接点都记录在了链表中。我们只需要遍历对应点的链表即可。
二、如何优化
1、代码模板
(1)问题:
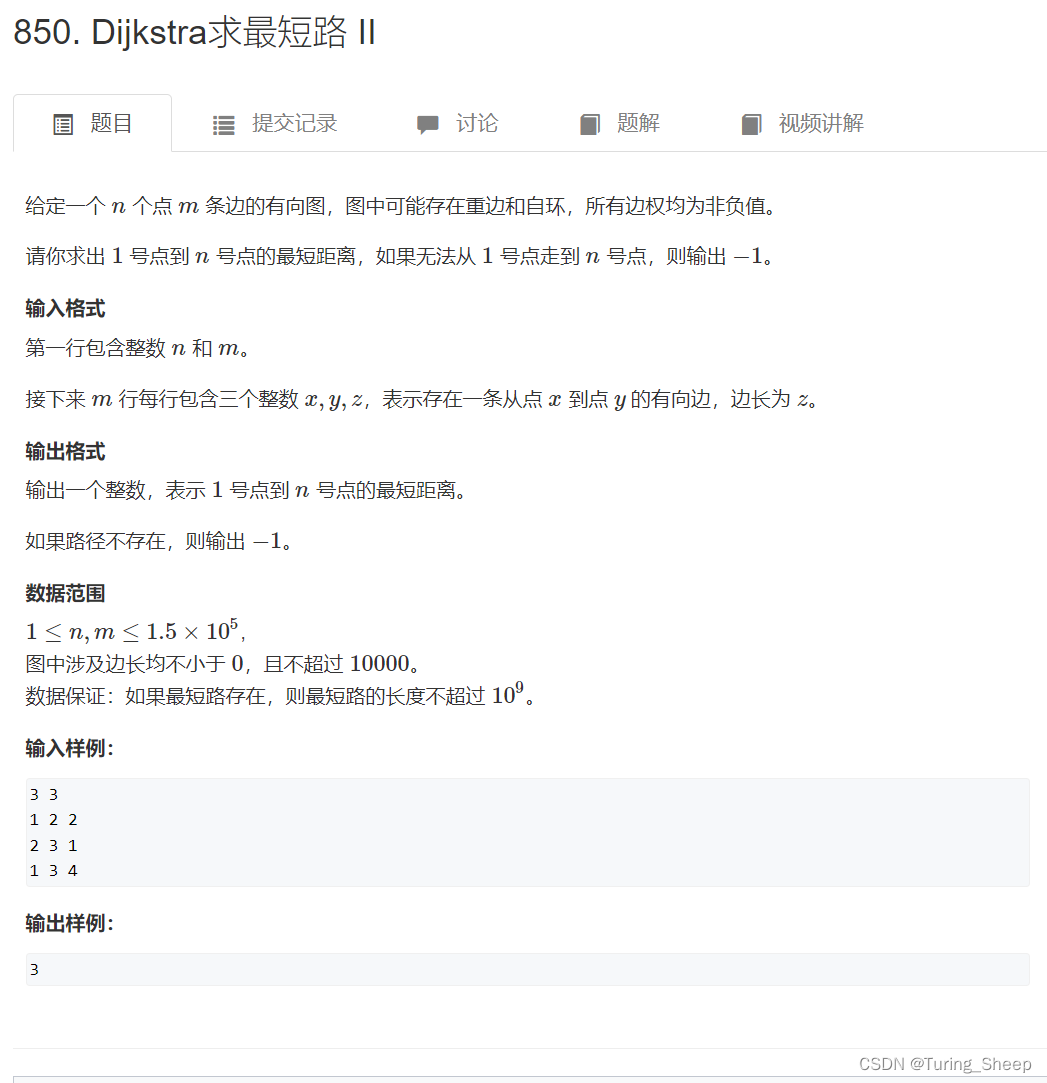
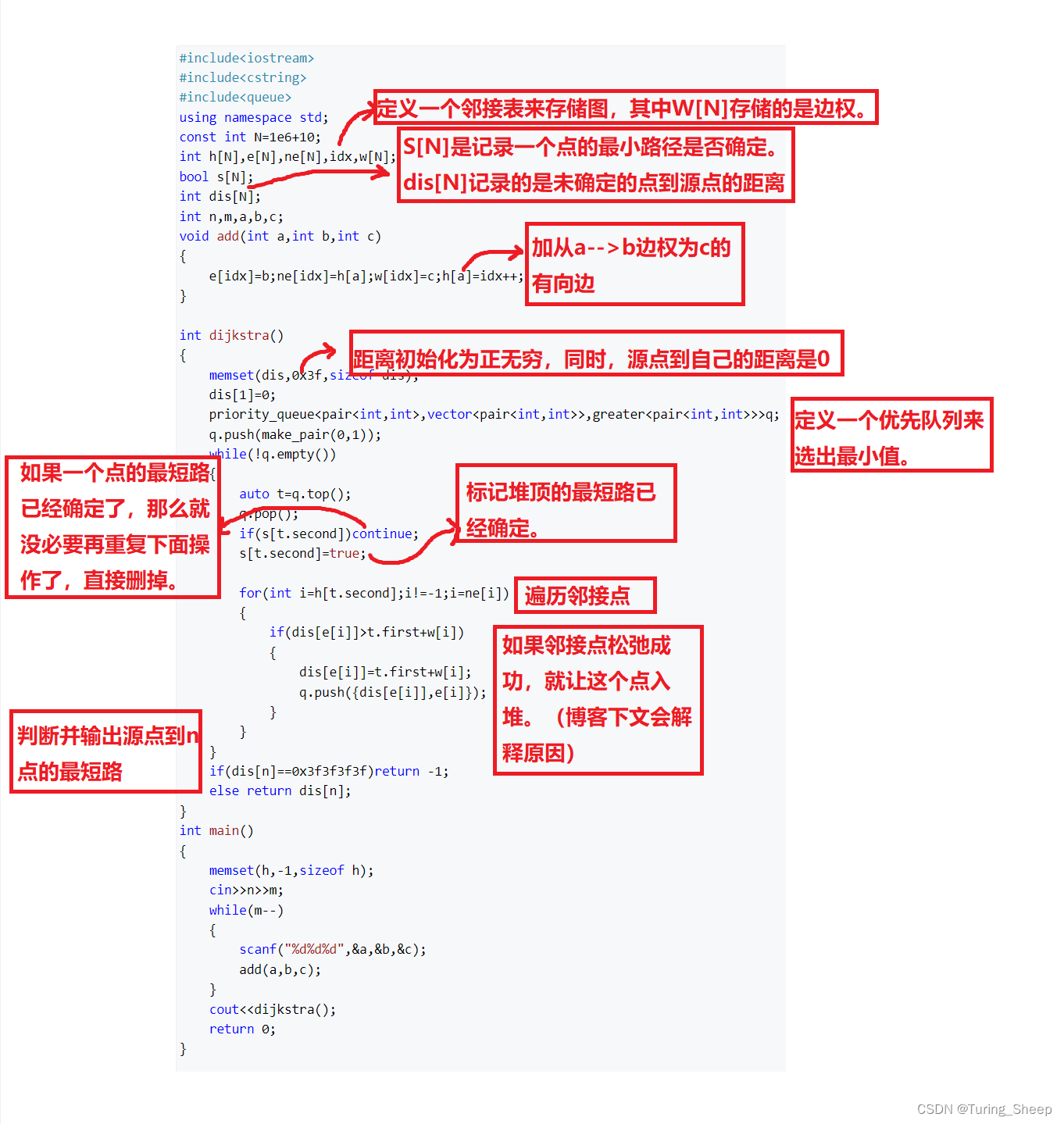
(2)模板:
#include<iostream>
#include<cstring>
#include<queue>
using namespace std;
const int N=1e6+10;
int h[N],e[N],ne[N],idx,w[N];
bool s[N];
int dis[N];
int n,m,a,b,c;
void add(int a,int b,int c)
{e[idx]=b;ne[idx]=h[a];w[idx]=c;h[a]=idx++;
}
int dijkstra()
{memset(dis,0x3f,sizeof dis);dis[1]=0;priority_queue<pair<int,int>,vector<pair<int,int>>,greater<pair<int,int>>>q;q.push(make_pair(0,1));while(!q.empty()){auto t=q.top();q.pop();if(s[t.second])continue;s[t.second]=true;for(int i=h[t.second];i!=-1;i=ne[i]){if(dis[e[i]]>t.first+w[i]){dis[e[i]]=t.first+w[i];q.push({dis[e[i]],e[i]});}}}if(dis[n]==0x3f3f3f3f)return -1;else return dis[n];
}
int main()
{memset(h,-1,sizeof h);cin>>n>>m;while(m--){scanf("%d%d%d",&a,&b,&c);add(a,b,c);}cout<<dijkstra();return 0;
}
2、详细解读
三、优化分析
1、使用条件:
我们这道题中的图是稀疏图,所以我们可以使用邻接表,从而优化这个代码。但是要是稠密图的话,我们可能还是需要用邻接矩阵来存储,这样的话一般使用的是朴素的dijkstra算法。
2、常见问题:
(1)什么样的路径才能进优先队列
只有一个点得到有效更新的时候,我们才会让这个点进堆。我们一开始是正无穷,那么源点的邻接点一定会得到有效的更新,那么我们让这些点进堆。那么第二次我们遍历的邻接点中,如果还包含上一次松弛后的点,而恰好本次也没有更新成功,那么我们让这个点进堆的话,堆中就会出现两个一样的数据。这样就造成了重复。而我们让不更新的点进堆,并不是说这个点已经确定了,而是说这个点的状态在之前的更新过程中已经进堆了。
所以,我们只让那些松弛成功的点进堆。
(2)重边的处理
我们的邻接矩阵存储图的时候,会通过min函数存储重边中的最小边。但是我们的邻接表会存储所有重边。这其实是没关系的。比如我们a,b点内存储了3,1,2。三个长度的边。一开始可能会让3+x这个距离进堆,但是我们当再次遍历到1这个边,松弛成功后我们就会让1+x进堆。而1+x存在后,3+x就不会成堆顶,所以就不会对结果产生影响。那么当我们的1+x出堆后,说明这个点的最短路已经确定了。那么我们直接标记一下,所以当1+x删除后,轮到3+x出堆的时候,由于我们已经标记了。所以通过continue就可以直接删除3+x这个数据。而后续的2+x也会在轮到它出堆的时候,删除掉。
(3)时间复杂度
寻找路径最短的点(取出n个最小值的过程):O(n)
加入集合ST:O(n)
更新距离:O(mlogn)
所以总的时间复杂度是:O(mlogn)