1. 常见缩略词
相比目前还无法大规模应用的无人驾驶,高级辅助驾驶系统是一种把汽车变的更智能的实用技术。
| 缩略词 | 全称 | 中文 | 方案 |
|---|---|---|---|
| ACC | Adaptive Cruise Control | 自适应巡航控制 | FV 1+FR 2 |
| AEB | Autonomous Emergency Braking | 自主紧急制动 | FV+FR |
| AFS | Adaptive Front-Lighting System | 自适应前大灯系统 | FV+FR |
| AHS | Adaptive High-Beam System | 自适应远光灯系统 | FV+FR |
| APA | Automatic Parking Assistance | 自动泊车 | BR3 |
| BCW | Blind Collision Warning | 盲点碰撞预警 | RCR4 |
| BSD | Blind Spot Detection | 盲区监测 | RCR |
| DMS | Driver Monitoring Systems | 驾驶员监测系统 | RCR |
| DOW | Door Open Warning | 开门警告(后向来车) | RCR |
| ELKA | Emergence Lane Keeping Assist | 路沿车道保持 | FV+FR |
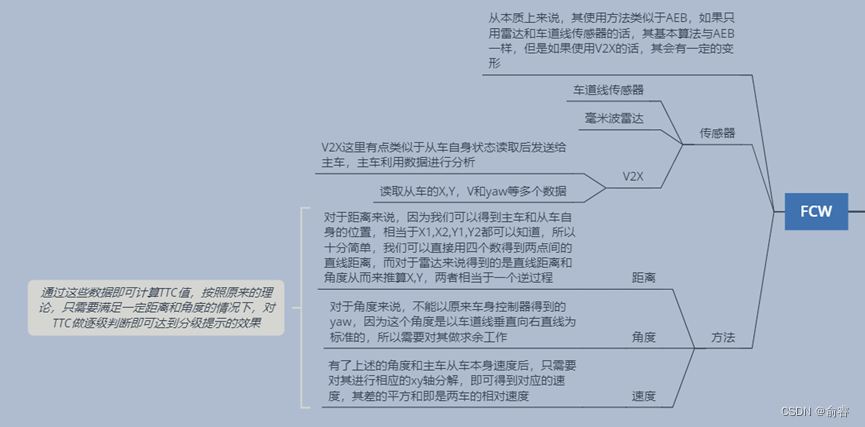
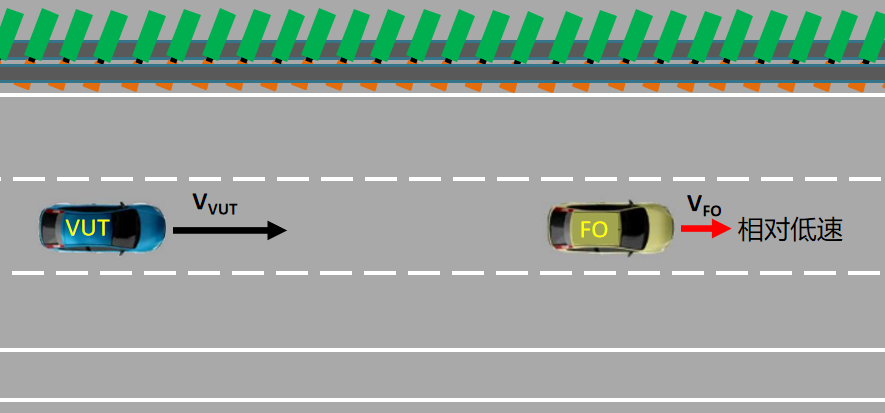
| FCW | Forward Collision Warning | 前向碰撞预警 | FV+FR |
| LCA | Lane Change Assistance | 辅助变道 | FV+FR |
| LDW | Lane Departure Warning | 车道偏离预警 | FV+FR |
| LKA | Lane Keep Assistance | 辅助车道保持 | FV+FR |
| PCW | Pre-Collision Warning | 预碰预警 | FV+FR |
| PDS | Pedestrian Detection System | 行人检测系统 | FV+FR |
| RCTB | Rear Cross Traffic Brake | 倒车过道制动 | RCR |
| RCW | Rear Collision Warning | 后碰警告 | RCR |
| TSR | Traffic Sign Recognition | 交通标志识别 | FV |
| VUT | Vehicle Under Test | 测试车辆 | |
| - | Remote Summon | 远程召唤 |
2. ADAS功能分类
引用丰田智驾白皮书,将ADAS功能分类到智驾等级

FV - Front Vision ↩︎
FR - Forward Radar ↩︎
BR - Backward Radar ↩︎
RCR - Rear Corner Radar ↩︎