“车距检测预警”技术同样是检测本车与前车的车距(HEADWAY),在车距过近的情况下向驾驶员发出警报。因为车距Headway一般会换算成时间显示出来,所以容易与FCW的碰撞时间混淆,但是HMW的车距时间和FCW的碰撞时间(TTC)计算方式是不同的:
-
Headway车距时间 = 两车车距 / 本车的车速
-
FCW的碰撞时间(TTC)= 两车车距 / 两车的相对车速
栗子:
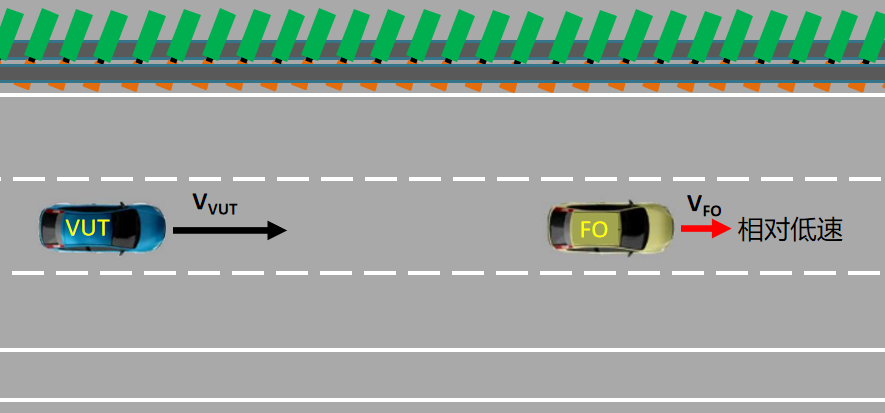
当前后两车的距离为20米,前车的车速为60Km/h,后车的车速为80Km/h, 那么HMW显示的时间就是0.9秒,而FCW显示的TTC碰撞时间就是3.6秒。如果前后车的车速都为60Km/h,那么HMW显示的时间是1.2秒,而FCW不会报警,因为两车虽然距离很近,但是速度相同,并不会追尾。所以,在前后车都处于运动状态时,FCW的TTC碰撞时间一般要长于Headway车距时间。
在实际场景中,HMW主要在车距近的情况下报警,可以帮助驾驶员养成开车保持车距的规范驾驶习惯,我们将其定义为 “危险不紧急 ”型功能;而FCW主要针对前后两车距离较近且存在较大速度差的紧急情况,比如前车急刹,属于 “危险且紧急” 型功能