一.硬件准备
1.压力传感器(HX711称重模块)
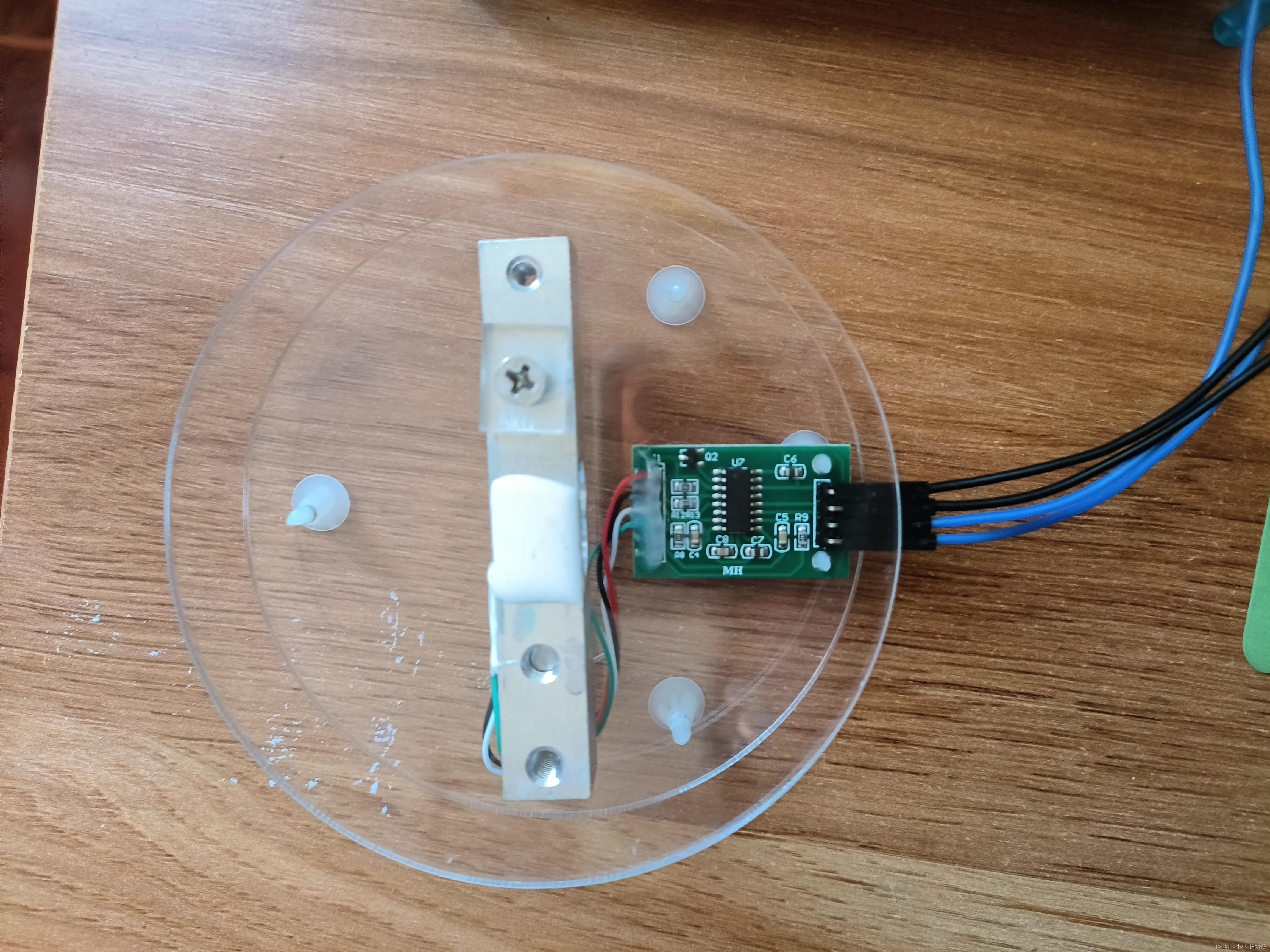
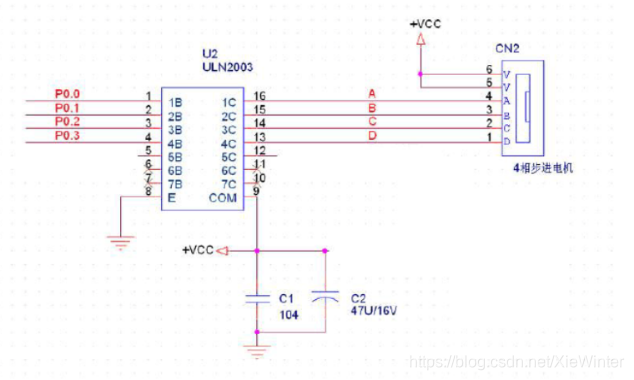
2.接线说明
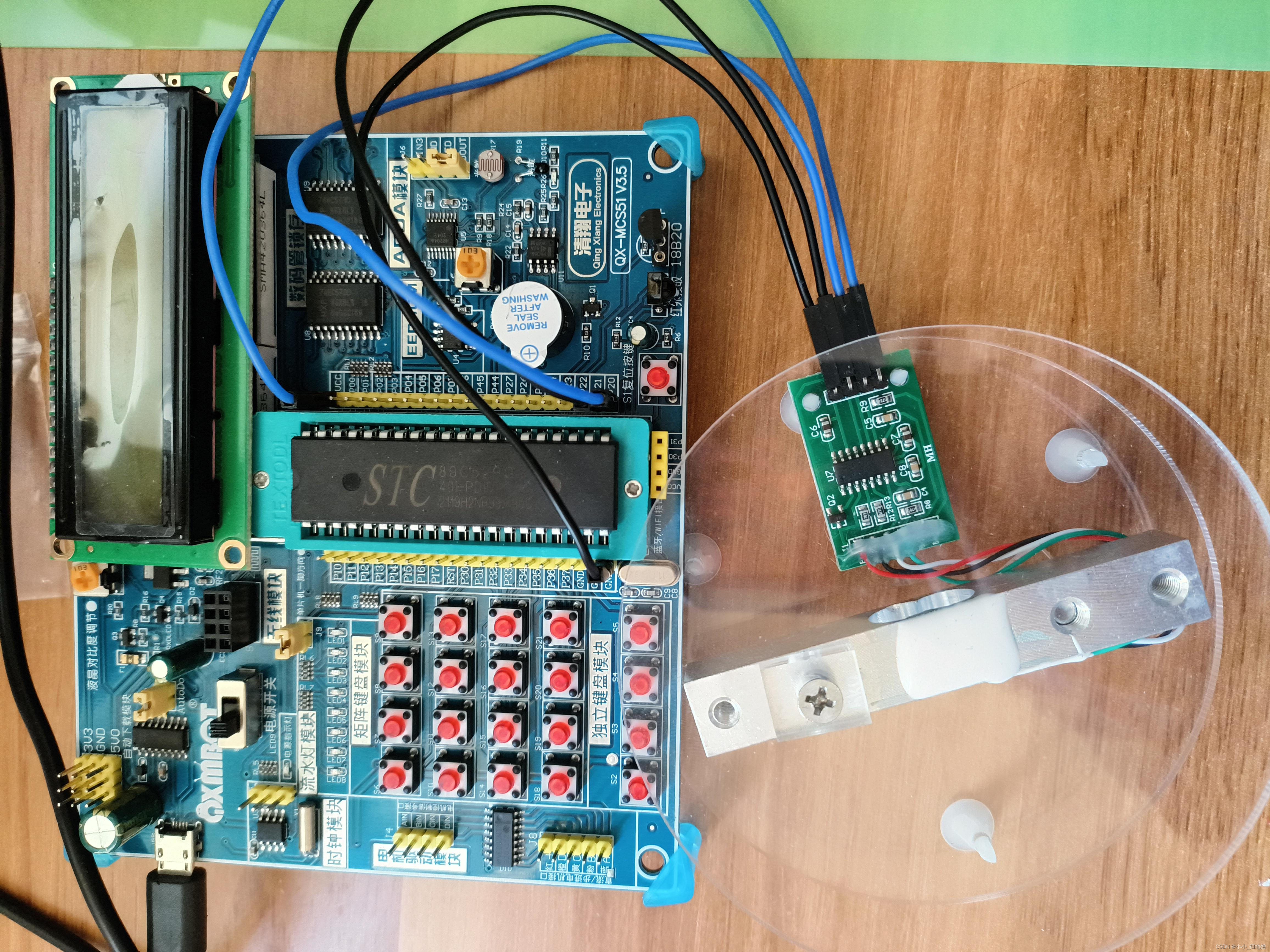
如上图接线所示:称重模块HX711模块各个引脚与单片机引脚对应如下:
(1).VCC——>VCC
(2).GND——>GND
(3).SCLK——>SDA
(4).DT——>SCLK
注:引脚一定要对应接好,尤其是数据(SDA)脚和时钟(SCLK)脚
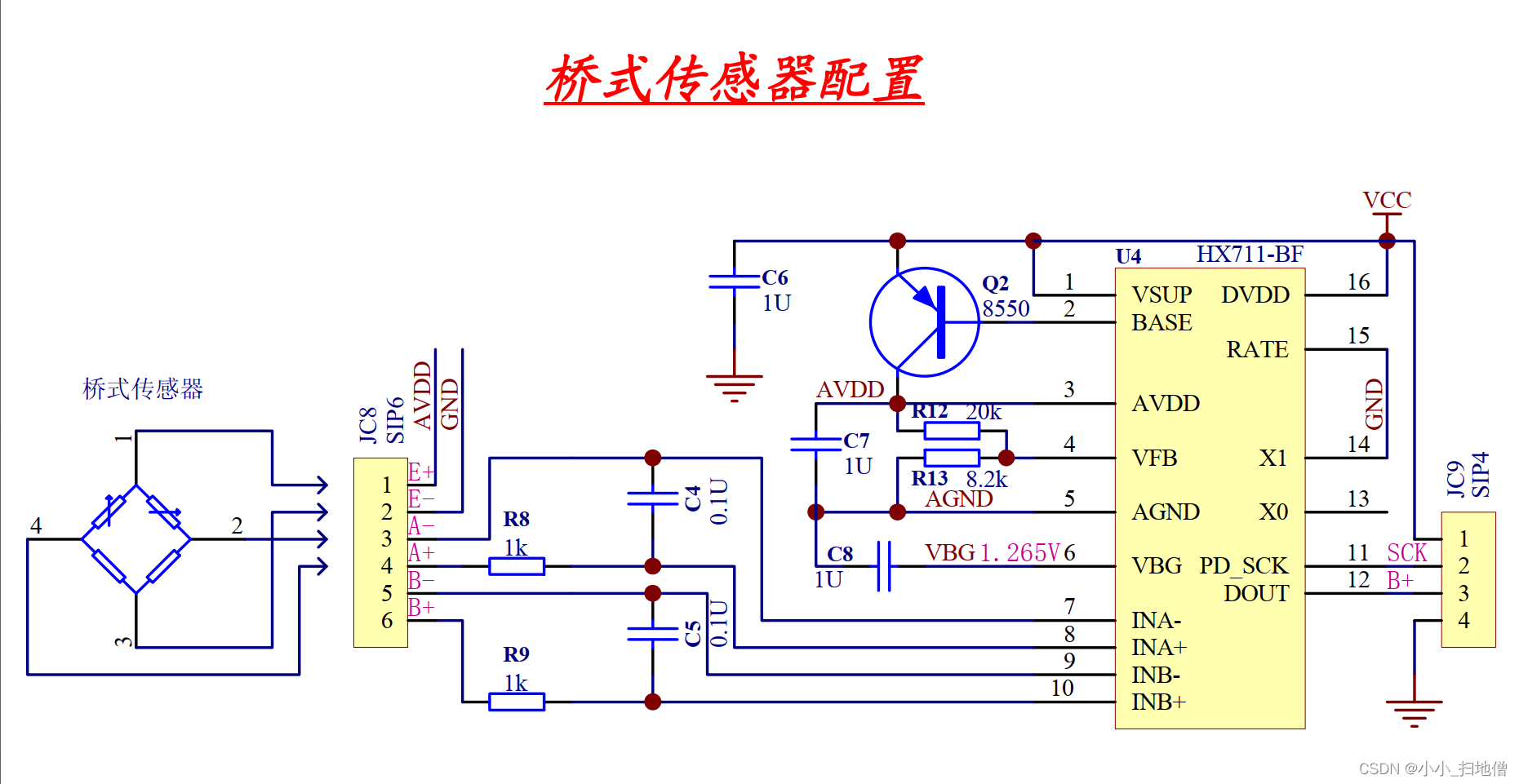
二.原理图
(一).称重模块原理图
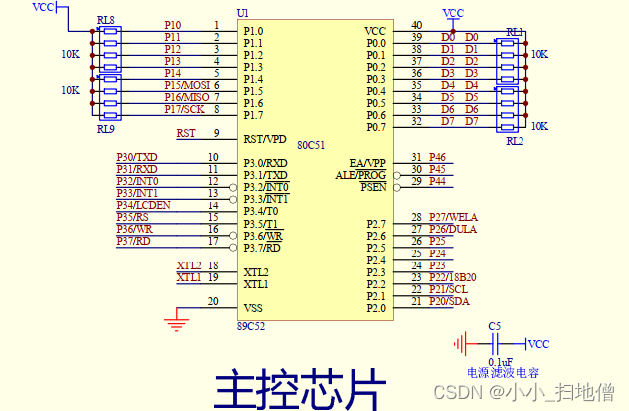
(二).单片机原理图
三.代码详解及功能演示
(一).LCD_1602显示重量
1.子代码详解(HX711获取AD值)
/*获取ad值*/
unsigned long HX711_Read(void)
{unsigned long count; unsigned char i; HX711_DOUT = 1; _nop_();_nop_();HX711_SCK = 0; count=0;for(i=0; i<24; i++){ HX711_SCK = 1; count = count << 1; HX711_SCK = 0; if(HX711_DOUT)count++; } HX711_SCK = 1; count = count^0x800000;//第25个脉冲下降沿来时,转换数据_nop_();_nop_();HX711_SCK = 0; return(count);
}/*称毛皮重*/
void Get_Maopi()
{Weight_Maopi = HX711_Read();
// Weight_Maopi = (unsigned int)((float)Weight_Maopi/423.15);
}/*称实物重*/
void Get_Weight()
{Weight_Shiwu = HX711_Read(); Weight_Shiwu = Weight_Shiwu - Weight_Maopi;Weight_Shiwu = (unsigned int)((float)Weight_Shiwu/429.5);
}
2.按键控制
/*按键扫描*/
void Keyscan()
{if(key1 == 0)Delay(10);if(key1 == 0){Get_Maopi();while(!key1);}if(key2 == 0)Delay(10);if(key2 == 0){Weight_Maopi = 0;while(!key2);}
}3.源代码
#include<reg52.h>
#include <intrins.h>/*I/O口声明*/
sbit LCD1602_RS = P3^5;
sbit LCD1602_RW = P3^6;
sbit LCD1602_EN = P3^4;
sbit HX711_DOUT = P2^1;
sbit HX711_SCK = P2^0;
sbit key1 = P3^0;
sbit key2 = P3^1;/*全局变量定义*/
unsigned long Weight_Shiwu = 0;
unsigned long Weight_Maopi = 0;/*函数声明*/
void Delay(unsigned int n);
void Init_LCD1602();//LCD1602初始化函数
void LCD1602_write_com(unsigned char com); //写指令
void LCD1602_write_word(unsigned char *s); //写字符串
void LCD1602_write_data(unsigned char dat); //写数据
unsigned long HX711_Read(void);
void Keyscan();
void Get_Maopi();
void Get_Weight();int main()
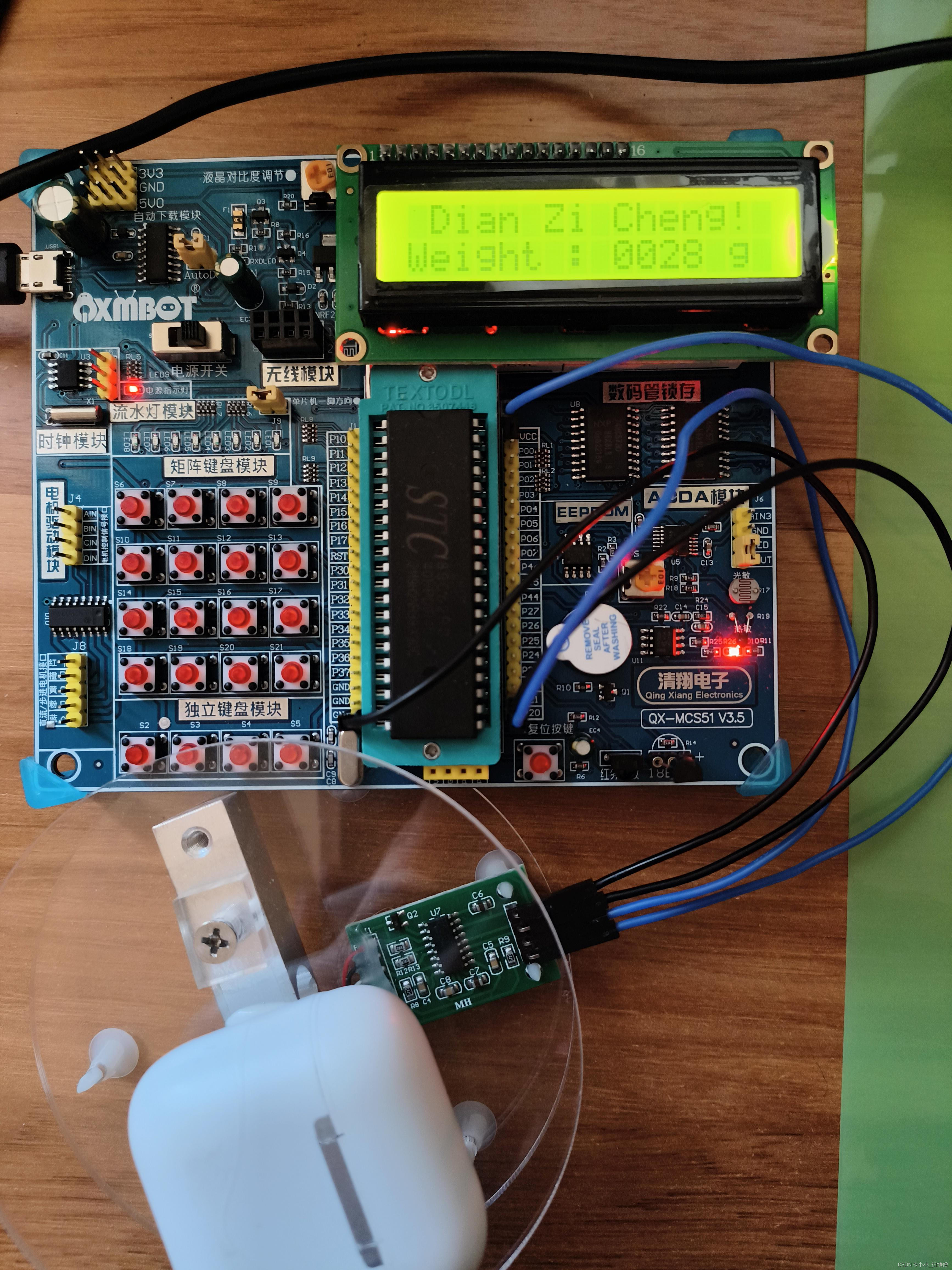
{ Init_LCD1602(); //LCD1602初始化LCD1602_write_com(0x80); //移动光标到第一行首位LCD1602_write_word(" Dian Zi Cheng! "); //显示 Dian Zi Cheng! LCD1602_write_com(0x80 + 0x40); //移动光标到第二行首位LCD1602_write_word("Weight :"), //显示Weight :Delay(1000); //1s延时while(1){Keyscan();Get_Weight(); LCD1602_write_com(0x80+0x49); //移动光标到第二行第九位LCD1602_write_data(Weight_Shiwu%10000/1000 + 0X30); LCD1602_write_data(Weight_Shiwu%1000/100 + 0X30);LCD1602_write_data(Weight_Shiwu%100/10 + 0X30);LCD1602_write_data(Weight_Shiwu%10 + 0X30);LCD1602_write_word(" g");}return 0;
}/*称实物重*/
void Get_Weight()
{Weight_Shiwu = HX711_Read(); Weight_Shiwu = Weight_Shiwu - Weight_Maopi;Weight_Shiwu = (unsigned int)((float)Weight_Shiwu/429.5);
}/*延时子函数*/
void Delay(unsigned int n)
{int i, j;for(i=0; i<n; i++)for(j=0; j<110; j++);
}//判断液晶忙,如果忙则等待
void Read_Busy()
{unsigned char busy;P0 = 0xff;LCD1602_RS = 0;LCD1602_RW = 1;do //此语句先执行后判断{LCD1602_EN = 1;busy = P0;LCD1602_EN = 0; //不使用时将EN拉低释放,以便于下次写数据的时候直接将EN置高}while(busy & 0x80);//判断P0的最高位是否为1,为1时忙碌(禁止),为0时不忙(允许发数据)//直到不忙时才跳出循环
}/*写指令*/
void LCD1602_write_com(unsigned char com)
{Read_Busy();//判断忙否LCD1602_RS = 0;Delay(10);LCD1602_RW = 0; P0 = com;LCD1602_EN = 1;Delay(10);LCD1602_EN = 0;
}/*写数据*/
void LCD1602_write_data(unsigned char dat)
{Read_Busy();LCD1602_RS = 1;Delay(10);LCD1602_RW = 0; P0 = dat;LCD1602_EN = 1;Delay(10);LCD1602_EN = 0;
}/*写连续字符(字符串)*/
void LCD1602_write_word(unsigned char *s)
{while(*s != '\0'){LCD1602_write_data(*s);s++;}
}/*初始化LCD1602*/
void Init_LCD1602()
{LCD1602_EN = 0;//LCD1602_RW = 0;LCD1602_write_com(0x38);LCD1602_write_com(0x0c);LCD1602_write_com(0x06);LCD1602_write_com(0x01);
}/*获取ad值*/
unsigned long HX711_Read(void)
{unsigned long count; unsigned char i; HX711_DOUT = 1; _nop_();_nop_();HX711_SCK = 0; count=0;for(i=0; i<24; i++){ HX711_SCK = 1; count = count << 1; HX711_SCK = 0; if(HX711_DOUT)count++; } HX711_SCK = 1; count = count^0x800000;//第25个脉冲下降沿来时,转换数据_nop_();_nop_();HX711_SCK = 0; return(count);
}/*称毛皮重*/
void Get_Maopi()
{Weight_Maopi = HX711_Read();
// Weight_Maopi = (unsigned int)((float)Weight_Maopi/423.15);
}/*按键扫描*/
void Keyscan()
{if(key1 == 0)Delay(10);if(key1 == 0){Get_Maopi();while(!key1);}if(key2 == 0)Delay(10);if(key2 == 0){Weight_Maopi = 0;while(!key2);}
}
4.功能演示
(二).LCD_1602显示重量及计算价钱(单价可以按键调节)
源代码如下
#include<reg52.h>
#include <intrins.h>/*I/O口声明*/
sbit LCD1602_RS = P3^5;
sbit LCD1602_RW = P3^6;
sbit LCD1602_EN = P3^4;
sbit HX711_DOUT = P2^1;
sbit HX711_SCK = P2^0;
sbit key1 = P3^0;
sbit key2 = P3^1;
sbit key3 = P3^2;
sbit key4 = P3^3;
sbit Flag_ERROR = P2^3;/*全局变量定义*/
unsigned long Weight_Shiwu = 0;
unsigned long Weight_Maopi = 0;
unsigned int price = 1;
unsigned long all = 0;
/*函数声明*/
void Delay(unsigned int n);
void Init_LCD1602();//LCD1602初始化函数
void LCD1602_write_com(unsigned char com); //写指令
void LCD1602_write_word(unsigned char *s); //写字符串
void LCD1602_write_data(unsigned char dat); //写数据
unsigned long HX711_Read(void);
void Keyscan();
void Get_Maopi();
void Get_Weight();
void All_Price();
int main()
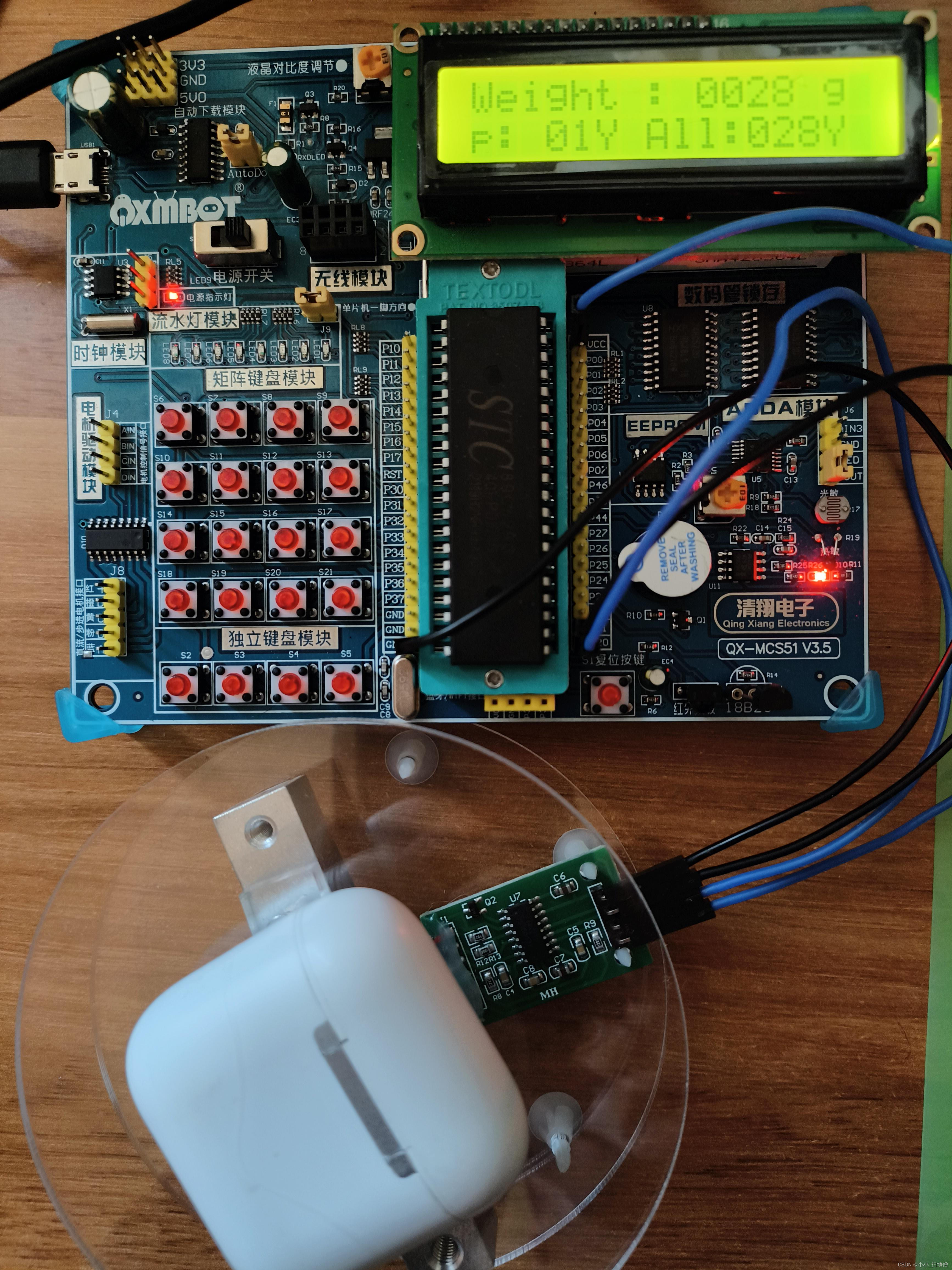
{ Init_LCD1602(); //LCD1602初始化LCD1602_write_com(0x80);//移动光标到第一行首位LCD1602_write_word(" Dian Zi Cheng! "); //显示 Dian Zi Cheng! LCD1602_write_com(0x80 + 0x40); //移动光标到第二行首位LCD1602_write_word(" Welcom to use! "); //显示Welcom to use!Delay(1000); //1s延时LCD1602_write_com(0x01); //清屏LCD1602_write_com(0x80);//移动光标到第一行首位LCD1602_write_word("Weight :");//显示Weight :LCD1602_write_com(0x80 + 0x40);//移动光标到第二行首位LCD1602_write_word("p:");//显示price ://Delay(1000); //1s延时while(1){Keyscan();Get_Weight();All_Price();if(Weight_Shiwu > 5000) //超重报警{Flag_ERROR = 0; //报警LCD1602_write_com(0x80+0x09);LCD1602_write_word("ERROR!"); }else{Flag_ERROR = 1;//关闭蜂鸣器 LCD1602_write_com(0x80+0x09);//移动光标到第1行第九位LCD1602_write_data(Weight_Shiwu%10000/1000 + 0X30); LCD1602_write_data(Weight_Shiwu%1000/100 + 0X30);LCD1602_write_data(Weight_Shiwu%100/10 + 0X30);LCD1602_write_data(Weight_Shiwu%10 + 0X30);LCD1602_write_word(" g");LCD1602_write_com(0x80+0x43); //移动光标到第二行第3位LCD1602_write_data(price/10 + 0X30);LCD1602_write_data(price%10 + 0X30);LCD1602_write_word("Y");LCD1602_write_com(0x80+0x47); //移动光标到第二行第7位LCD1602_write_word("All:");//显示All_price :LCD1602_write_data(all%1000/100 + 0X30);LCD1602_write_data(all%100/10 + 0X30);LCD1602_write_data(all%10 + 0X30);LCD1602_write_word("Y"); }}return 0;
}//计算价钱
void All_Price()
{ all = price *Weight_Shiwu;
}/*称实物重*/
void Get_Weight()
{Weight_Shiwu = HX711_Read(); Weight_Shiwu = Weight_Shiwu - Weight_Maopi;Weight_Shiwu = (unsigned int)((float)Weight_Shiwu/429.5);}/*延时子函数*/
void Delay(unsigned int n)
{int i, j;for(i=0; i<n; i++)for(j=0; j<114; j++);
}//判断液晶忙,如果忙则等待
void Read_Busy()
{unsigned char busy;P0 = 0xff;LCD1602_RS = 0;LCD1602_RW = 1;do //此语句先执行后判断{LCD1602_EN = 1;busy = P0;LCD1602_EN = 0; //不使用时将EN拉低释放,以便于下次写数据的时候直接将EN置高}while(busy & 0x80);//判断P0的最高位是否为1,为1时忙碌(禁止),为0时不忙(允许发数据)//直到不忙时才跳出循环
}/*写指令*/
void LCD1602_write_com(unsigned char com)
{Read_Busy();//判断忙否LCD1602_RS = 0;Delay(10);LCD1602_RW = 0; P0 = com;LCD1602_EN = 1;Delay(10);LCD1602_EN = 0;
}/*写数据*/
void LCD1602_write_data(unsigned char dat)
{Read_Busy();LCD1602_RS = 1;Delay(10);LCD1602_RW = 0; P0 = dat;LCD1602_EN = 1;Delay(10);LCD1602_EN = 0;
}/*写连续字符(字符串)*/
void LCD1602_write_word(unsigned char *s)
{while(*s != '\0'){LCD1602_write_data(*s);s++;}
}/*初始化LCD1602*/
void Init_LCD1602()
{LCD1602_EN = 0;//LCD1602_RW = 0;LCD1602_write_com(0x38);//显示模式设置LCD1602_write_com(0x0c);//显示开及光标设置LCD1602_write_com(0x06);//显示光标移动设置LCD1602_write_com(0x01);//显示清屏
}/*获取ad值*/
unsigned long HX711_Read(void)
{unsigned long count; unsigned char i; HX711_DOUT = 1; _nop_();_nop_();HX711_SCK = 0; count=0;for(i=0; i<24; i++){ HX711_SCK = 1; count = count << 1; HX711_SCK = 0; if(HX711_DOUT)count++; } HX711_SCK = 1; count = count^0x800000;//第25个脉冲下降沿来时,转换数据_nop_();_nop_();HX711_SCK = 0; return(count);
}/*称毛皮重*/
void Get_Maopi()
{Weight_Maopi = HX711_Read();
// Weight_Maopi = (unsigned int)((float)Weight_Maopi/423.15);
}/*按键扫描*/
void Keyscan()
{if(key1 == 0){Delay(5);if(key1 == 0){while(!key1);Get_Maopi(); }}if(key2 == 0){Delay(5);if(key2 == 0){while(!key2);Weight_Maopi = 0; }}if(key3 == 0){Delay(5);if(key3 == 0){price++;while(!key3);}}if(key4 == 0){Delay(5);if(key4 == 0){price--;while(!key4);}}
}
功能演示
四.多功能电子秤显示日历时间及闹钟设置
注:此内容详见专栏“51单片机”中《万年历》代码详解
最后,希望我的分享对你有所启发,敬请关注,持续更新,共同进步!