在前文中,我们分析了 IF信号的频率,并展示了该频率与物体到雷达的距离
成正比。在本文中,我们将探讨IF 信号的相位。如果我们希望了解 FMCW 雷达响应物体极小位移的能力,那么研究相位就非常重要。雷达正是凭此非常快速且准确地测量物体的速度。这也是在心跳监测和振动检测等应用中使用雷达的基础。
1.傅里叶变化的相关概念
时域中的正弦波会在频域中产生一个尖峰,该尖峰的位置与正弦波的频率相对应。应了解频域中的信号是包含振幅和相位的复数,这一点
很重要。因此,虽然此处的图表示傅里叶变换的振幅,但此处的每个值
实际上是一个包含振幅和相位的复数。

信号可以使用复数的形式来进行表示f(t)=Ajθf(t)=A^{j\theta}f(t)=Ajθ,其中AAA为信号的幅度,θ\thetaθ为信号的相位。
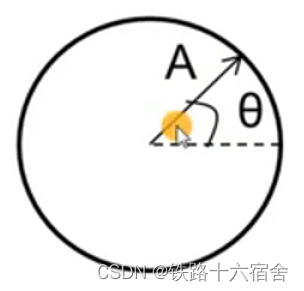
还可以将其用以下图形的方式表示为一个相量,该相量是一个矢量,具有
与振幅 A 相对应的长度以及与相位 θ相对应的方向。后续我们都已这种只管的方式来表示向量。
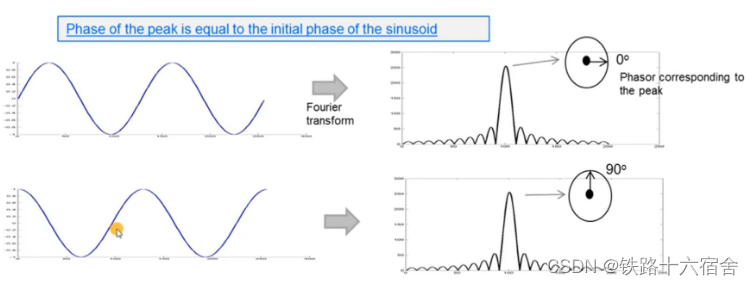
傅里叶变换的一条重要性质是,峰值的相位对应于正弦波的初始相位。
因此,下图左侧的正弦波以特定的初始相位开始。在右侧对应的傅里叶变换中,该相位反映在此处峰值的相位中。在这里,这是一个正弦波,其频率
与上面的正弦波相同,但起始相位与该相位相差 90 度。因此,相应地,傅里叶变换将具有一个峰值,其位置与此处相同,但相位与该前一个峰值相比偏移了90 度。
2.IF信号的相位
在前文中,我们使用 f-t 图来分析 IF信号的频率与到物体的距离之间的关系。
在文中,我们将使用A-t 图来分析IF 信号的相位。
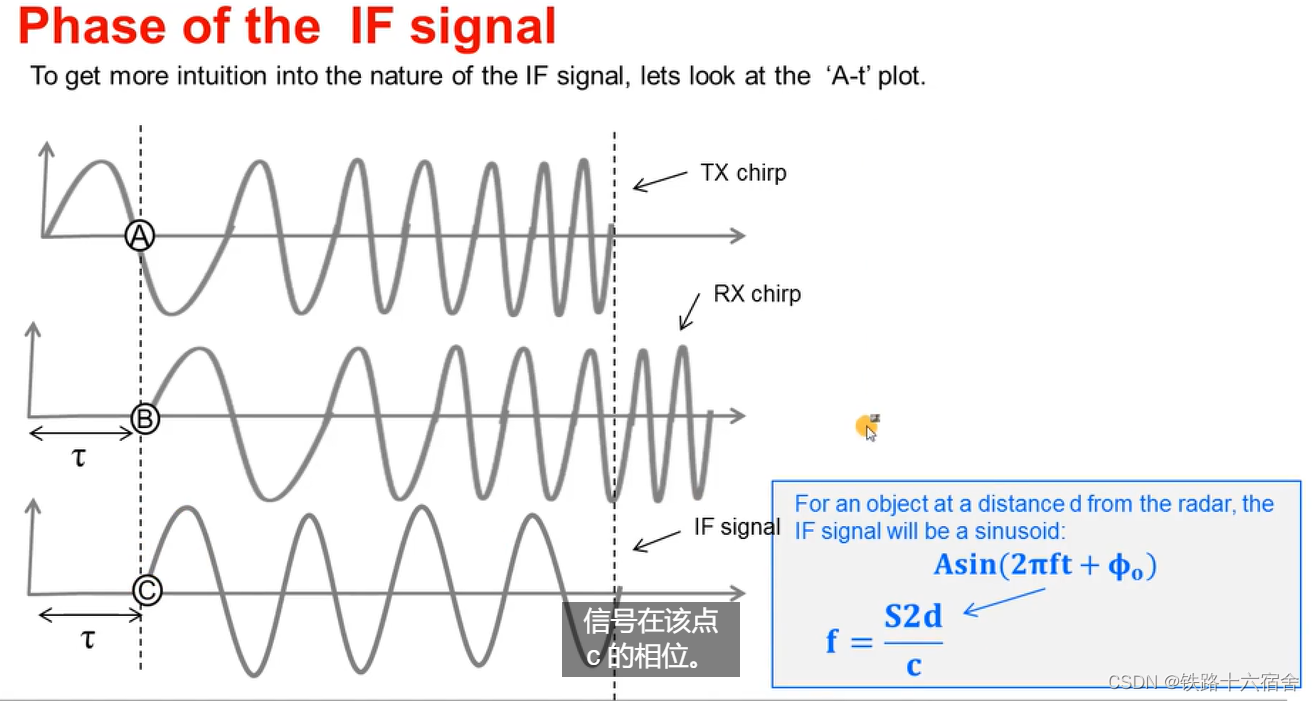
这里顶部的图显示了TX 线性调频脉冲的 A-t 图。中间的图是 RX线性调频脉冲,它是 TX 线性调频脉冲的延迟版本,延迟量为 τττ,τττ 是往返延迟。
正如我们先前了解到的,对于单个物体,IF信号将是一个具有恒定频率的信号,换句话说,单个正弦波。那么,从数学的角度而言,我可以将该 IF 信号表示为Asin(2πft+φ0)Asin(2πft + φ_0)Asin(2πft+φ0),其中频率 fff由 S2d/cS2d/cS2d/c 给出,SSS 是斜率,ddd 是到物体的距离,ccc 是光速。相位 φ0φ0φ0正是 IF信号在该点c 的相位。
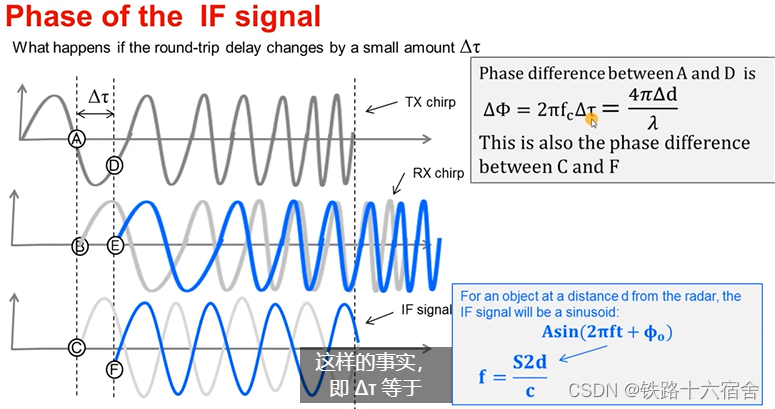
现在如果假设存在一个微小的位移,雷达的信号相位会发生什么样的变换了? 如下图所示,当雷达发生一个微小的变化Δd\Delta dΔd时,由于雷达的距离发生了变化,所以雷达的往返时间也会随着发生变化Δτ\Delta τΔτ,即接受信号的初始相位将从B点变换到E点,IF信号初始相位将会从C点变换到F点。当变换Δτ\Delta τΔτ,发送的chirp信号从A到B将会产生一个Δφ=2πfcΔτ\Delta φ=2πf_c\Delta τΔφ=2πfcΔτ的相位偏移,这个偏移会直接的反映在IF信号的初始相位上,由之前的知识可以得到Δτ=2dc\Delta τ=\frac{2d}{c}Δτ=c2d,又因为波长λ=c/fcλ=c/f_cλ=c/fc,所以Δφ=2πfcΔτ=4πΔdλ\Delta φ=2πf_c\Delta τ=\frac{4π\Delta d}{λ}Δφ=2πfcΔτ=λ4πΔd,记住关于Δφ\Delta φΔφ与Δd\Delta dΔd之间的关系。
3.中频信号的相位与微动物体
现在我们对中频信号进行分析,中频信号可以写成Asin(2πft+φ0)Asin(2πft + φ_0)Asin(2πft+φ0),其中中频信号的频率 f=S2dcf=\frac{S2d}{c}f=cS2d与物体距离雷达的距离呈线性关系,Δφ=4πΔdλ\Delta φ=\frac{4π\Delta d}{λ}Δφ=λ4πΔd公式又告诉我们相位的变化与Δd\Delta dΔd也是呈线性关系的。那我们在什么情况用相位来分析Δd\Delta dΔd呢?答案是相对雷达分辨率物体产生了微小的位移(大约为若干毫米)时。
在这里我们假设微小的距离变化为 1mm,而雷达发送的chirp信号如下图所示。那中频的信号频率和相位变化是如何的了?

由上图可知,S=50MH/μs ,Tc=40μsT_c=40μsTc=40μs,一毫米的距离变化对应的中频信号变化Δf=S2dc=333Hz\Delta f=\frac{S2d}{c}=333HzΔf=cS2d=333Hz,而在观测窗口TcT_cTc中,Δf∗Tc\Delta f*T_cΔf∗Tc=0.013周期,根据傅里叶变换的性质得知该频率差在频谱上是无法分辨的。
中频信号的频率变化已知雷达工作在77GHz,则一毫米相当于λ4\frac {λ}{4}4λ,所以中频信号的相位变化是Δφ=4πΔdλ=π\Delta φ=\frac{4π\Delta d}{λ}=πΔφ=λ4πΔd=π
这里,我们有一个重要的结论:IF 信号的相位对物体距离的微小变化非常敏感。但频率不是这样,正如我们分析的,频率对此类微小的变化非常不敏感。
3.测量目标速度的基本思想
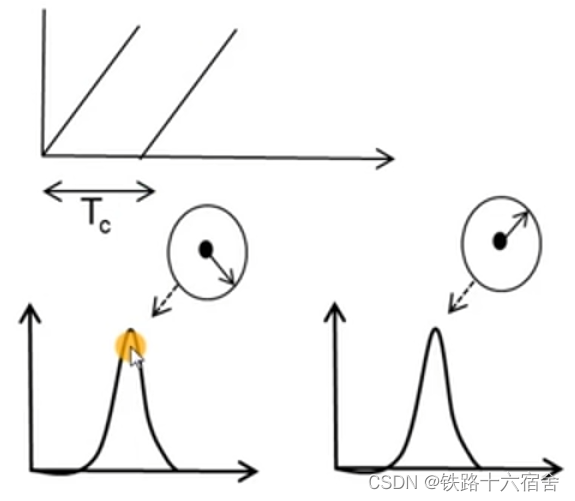
假设在雷达前方存在一个微动的物体,这时我们发送两个chirp信号,chirp信号之间的间隔为TcT_cTc,然后分别对两个chirp产生的中频信号进行FFT变换,过程如下图所示。根据上一节的分析可以得知,频谱图将在相同的位置具有峰值,但是具有不同的相位,这两个峰值的相位之间的测量相位差为ω 将于物体的运动直接对应。请注意,如果物体的速度为 v,则该物体在此时间段TcT_cTc 内的移动距离将为 Δd=v∗Tc\Delta d=v*T_cΔd=v∗Tc。再根据上边公式Δφ=4πΔdλ\Delta φ=\frac{4π\Delta d}{λ}Δφ=λ4πΔd,代入可得v=λφ4πTcv=\frac{λφ}{4πT_c}v=4πTcλφ,所以,我们可以用两个两个chirp的中频信号相位差来估算速度。
测量目标速度的基本思想就是使用两个chirp信号的峰值的相位差来估算单个物体的速度。
除速度测量之外,IF 信号的相位对微小移动非常敏感的事实也是有趣应用的基础,这些应用包括电机振动监测、心跳监测等。
这里的图描述了以振荡方式移动的物体随时间演变的过程。那么,此物体从该位置开始,向左偏移一点,然后返回,再向右偏移一点,依此类推。这可以表示一个正在振荡的物体。在这里,我们假设这些移动非常微小,因此物体的最大位移 Δd是波长的一小部分,例如一毫米或更短。现在,如果我们将一个雷达放置在该振荡的物体前方并发射一系列等间隔的线性调频脉冲,会怎么样?

您知道,由于从该物体上进行反射,因此其中的每个 TX 线性调频脉冲会产生一个反射线性调频脉冲,并且经处理的 IF 信号会在距离 FFT 中
产生一个峰值。现在,该峰值的频率不会在线性调频脉冲之间改变太多,因为Δd 非常小。但峰值的相位将会响应该物体的振荡移动。上图右侧显示的就是相关情况。那么,相位以特定的值开始,并将物体的移动镜像至左侧。
当物体返回时,相位返回到其初始值,然后偏移到另一侧。
如果我们按时间顺序绘制测量的峰值相位,如下图所示。
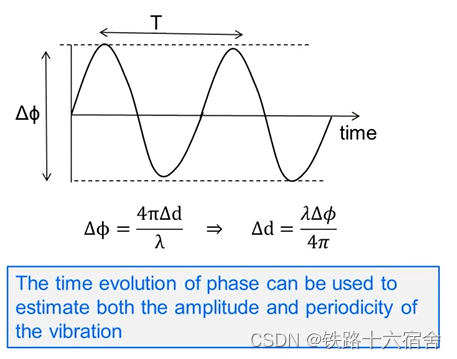
最大相位偏移Δφ 与最大位移 Δd 相关,由这图我们可以获得很多信息,包括目标的震振幅和周期。所以,我们又能获得一个很重要的结论:距离FFT 峰值相位随时间的演变可用于估算振动的振幅和周期。
下一章。我们会介绍使用称为多普勒FFT 的工具分离相对于雷达具有相同距离但具有不同速度的物体。