1D Party
题解
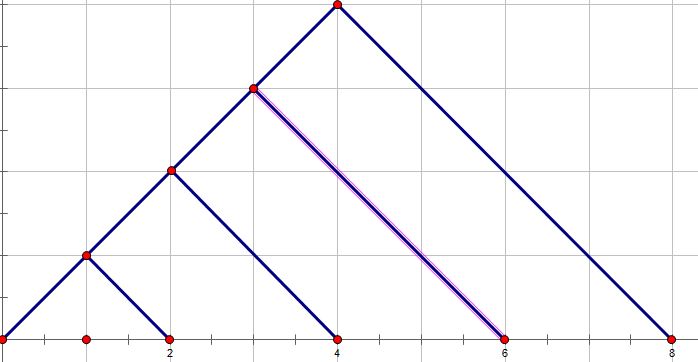
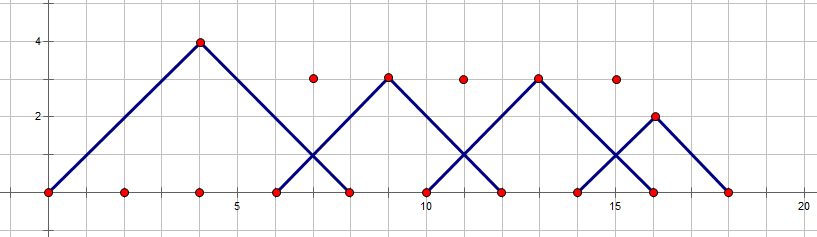
我们可以将原来的序列随时间变化转化成一个图像,纵轴代表时间,横轴代表 A A A的值。
那么我们可以得到这样一个图像:
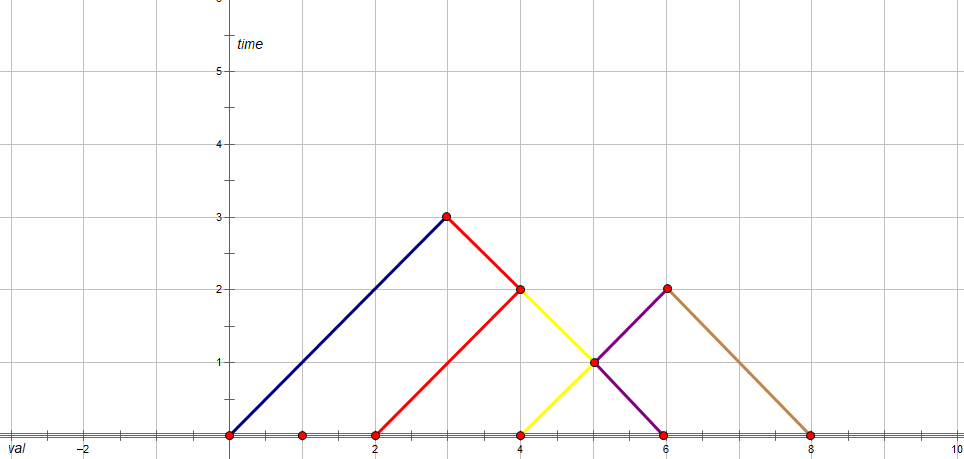
其中不同颜色代表不同的点的运动路径。
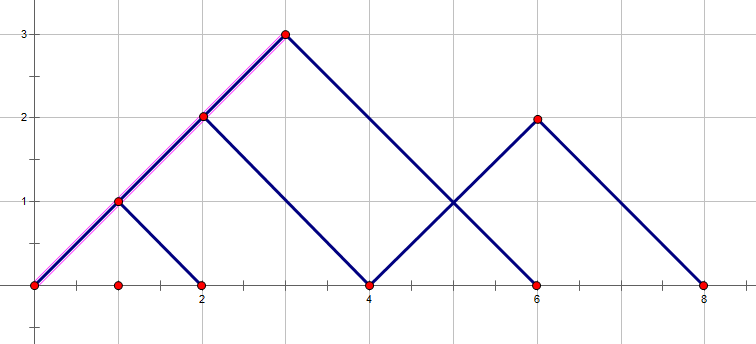
由于要最优,我们肯定要让每个点都一直处于运动状态,我们发现每个点大概有一下两种运动状态:
- 先向左走直到与另一个点相遇,再一直向右走。
- 先向右走直到与另一个点相遇,再一直向左走。
无论如何,与别的点相遇时都一定会产生一个交点,然后拐弯。
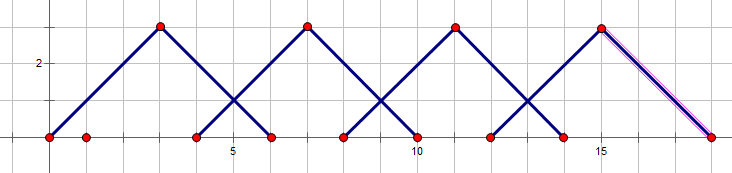
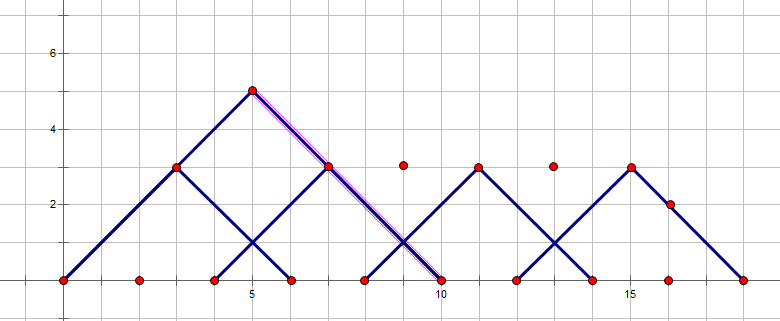
我们可以考虑每个点都不拐弯,而是交换它们的目标对象,也就是 i i i与 i + 1 i+1 i+1第一次相遇后就让 i i i去与 i + 2 i+2 i+2相遇, i + 1 i+1 i+1与 i − 1 i-1 i−1去相遇。
这样我们的图像可以被转化成这个样子:
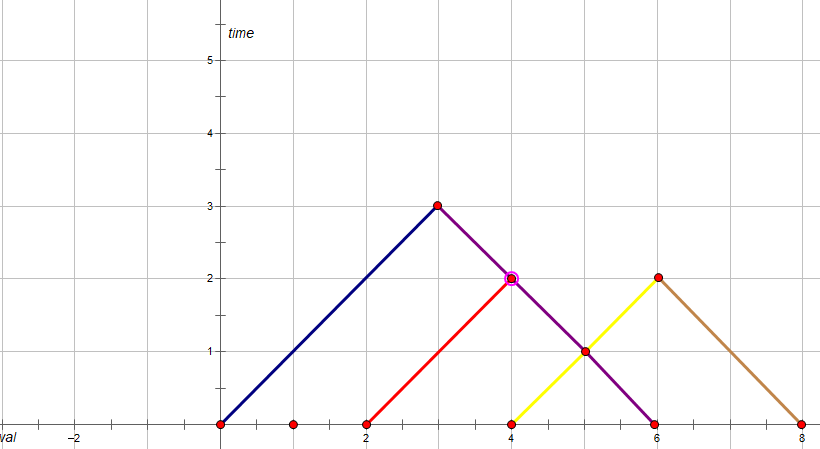
我们相当于得到了无数个三角形连接而成的连通块,当这些三角形所有三角形都联通的时候所有点都是满足条件的。
而我们的答案相当于最高的三角形的最高的高度。
于是我们就很容易想到通过 d p dp dp去找到这个值,设 d p i dp_{i} dpi表示前 i i i个都满足条件的最小高度。
容易得到转移方程式:
d p i = min j = 1 i − 2 ( m a x ( d p j , a i − a j − 1 2 ) ) dp_{i}=\min_{j=1}^{i-2}(max(dp_{j},\frac{a_{i}-a_{j-1}}{2})) dpi=j=1mini−2(max(dpj,2ai−aj−1))
但很明显,如果我们将 j j j到 i − 2 i-2 i−2都枚举一遍的话时间复杂度就是 O ( n 2 ) O(n^2) O(n2)了。但仔细想想,我们真的需要全部都枚举吗?
对于这样一个图形,
它明显可以被拆分作几个更小的三角形,
这样经过拆分后明显是可以使值变得更小的。
于是我们对于 d p i dp_{i} dpi的转移其实是只需要枚举 d p i − 2 dp_{i-2} dpi−2(代表包含 4 4 4个点的三角形)与 d p i − 3 dp_{i-3} dpi−3(代表包含 5 5 5个点的三角形)的。
为什么要枚举 d p i − 2 dp_{i-2} dpi−2呢,它不是也可以被拆分成两个包含 4 4 4个点的三角形吗?
但很明显如果所有三角形都是 3 3 3个点的就不具有可传递性了,两个三角形或许可以套在一起,但当它们套在一起后就不能继续往下套了,后一个 3 3 3三角形都已经有线段引出了,不可能继续向下套上去。
只有 4 4 4个点的是具有可传递性的:
首尾可以是 3 3 3个点的三角形,但由于会影响到是 a 4 − a 1 a_{4}-a_{1} a4−a1还是 a 5 − a 2 a_{5}-a_{2} a5−a2之类的,还是要都枚举一下,不如说通过特判来得到。
这样也可以说明我们为什么要枚举 d p i − 3 dp_{i-3} dpi−3了,一个包含 5 5 5个点的三角形,同样会影响到 4 4 4个点的三角形的枚举。
对于这样的情况,
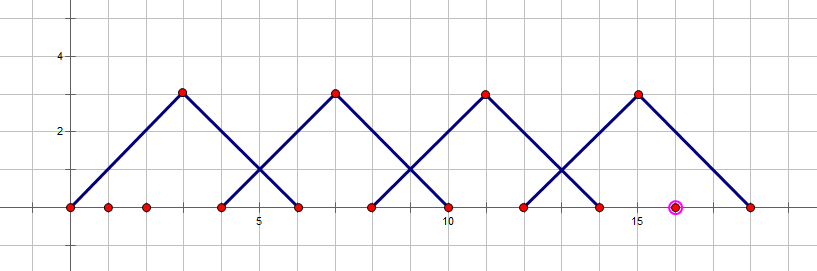
我们枚举 d p i − 3 dp_{i-3} dpi−3后可能变成这样的情况,
此时原本的 a 6 − a 3 a_{6}-a_{3} a6−a3并没有被枚举,取而代之的是 a 5 − a 1 a_{5}-a_{1} a5−a1与 a 7 − a 4 a_{7}-a_{4} a7−a4。很明显,这样的答案时不一样的,所以我们需要针对这种情况单独枚举。
但如果枚举 d p i − 4 dp_{i-4} dpi−4就完全没有意义了,
这种情况是完全包含了的,比 6 6 6个点还大的同理也可以被拆分成更小的三角形,所以只需要枚举 d p i − 2 dp_{i-2} dpi−2与 d p i − 3 dp_{i-3} dpi−3。
只与枚举最前面和最后面的 3 3 3个点的三角形,我们可以通过建虚点的方式来将其转化成 4 4 4个点的三角形来解决。
时间复杂度 O ( n ) O\left(n\right) O(n)。
还有一种稍劣点的二分做法,就是去二分碰面的时间,再去进行 d p dp dp,这种 d p dp dp就不需要想我们这样考虑这么多了,但它的时间复杂度是 O ( n l o g n ) O\left(nlog\,n\right) O(nlogn)。
源码
O ( n ) d p O\left(n\right)dp O(n)dp。
#include<bits/stdc++.h>
using namespace std;
#define MAXN 200005
#define lowbit(x) (x&-x)
#define reg register
#define mkpr make_pair
#define fir first
#define sec second
typedef long long LL;
typedef unsigned long long uLL;
const int INF=0x7f7f7f7f;
const int mo=998244353;
const int zero=500;
const LL jzm=2333;
const int orG=3,invG=332748118;
const double Pi=acos(-1.0);
typedef pair<int,int> pii;
const double PI=acos(-1.0);
template<typename _T>
_T Fabs(_T x){return x<0?-x:x;}
template<typename _T>
void read(_T &x){_T f=1;x=0;char s=getchar();while(s>'9'||s<'0'){if(s=='-')f=-1;s=getchar();}while('0'<=s&&s<='9'){x=(x<<3)+(x<<1)+(s^48);s=getchar();}x*=f;
}
template<typename _T>
void print(_T x){if(x<0){x=(~x)+1;putchar('-');}if(x>9)print(x/10);putchar(x%10+'0');}
int add(int x,int y){return x+y<mo?x+y:x+y-mo;}
int n,a[MAXN],dp[MAXN];
signed main(){read(n);for(int i=1;i<=n;i++)read(a[i]),dp[i]=INF;dp[n+1]=INF;dp[0]=dp[1]=0;dp[2]=a[2]-a[1];a[0]=a[1];a[n+1]=a[n];for(int i=3;i<=n+1;i++)for(int j=i-2;j>=max(1,i-3);j--)dp[i]=min(dp[i],max(dp[j],a[i]-a[j-1]));printf("%d\n",dp[n+1]/2);return 0;
}

![[HNOI2008]玩具装箱(1D/1D动态规划)](/images/no-images.jpg)