目录
一.标量函数和矢量函数
二.矢端曲线
三.矢量函数导数和微分
1.导数
2.导数的几何意义
3.微分
4.矢量导数性质
5.例题
四.矢量导数的应用
1.几何应用
1.曲线的切线和法平面
2.曲面的法线和法平面
2.物理应用
3.两大典型问题
五.矢量函数的积分
如果第一章我们引入了矢量,指的都是常矢量,那本章我们讨论的就是变化的矢量,即矢量函数.
研究矢量函数的这个话题,我们称之为矢量分析
通俗点讲,矢量 + 对时间t的微积分 = 矢量分析
由此,运动进入了矢量理论,我们所熟知的变速度v,变加速度a等等都是我们研究的典型例子.
一.标量函数和矢量函数
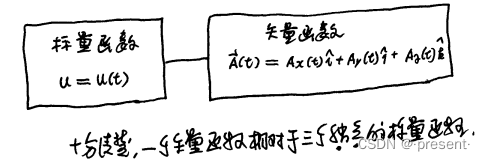
标量函数我们在中学的时候已经接触过
随着自变量t的变化, 都会有唯一一个因变量u(t)与之对应,我们称作为函数
标量顾名思义,它并不涉及方向,仅仅是与参数t相关,仅涉及值的变化,所以我们称之为标量.
那如何表示一个变化的矢量呢?
前面我们提到过,一个矢量的本质就是对构成它的单位矢压伸并相加的过程(单位矢的线性组合)
所以矢量函数,我们可以自然的联想到,假如它对应的单位矢的变化,本身就是一个标量函数,则
可以将矢量与t的变化,看作每一个单位矢随t的变化(一个标量函数),再线性组合,这样我们就自
然而然可以推导出矢量函数的定义
矢量函数的每一个对应分量,是一个标量函数,且三者两两独立,互不影响
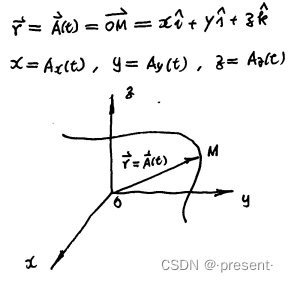
二.矢端曲线
但是仅仅说每一个分量都是一个随t变化的标量函数,还是很抽象,我们需要借助图来实现数形结合.
我们研究力,加速度等等,都是一个三维的向量,三维是有助于几何表示的.(四维,n维等更高维的运
动我们还没研究出来)
于是我们退一步,将向量仅仅用三个分量表示,几何至此进入了矢量函数.
我们把以坐标o为原点,终点M随t在变化的变曲线称作为矢端曲线.
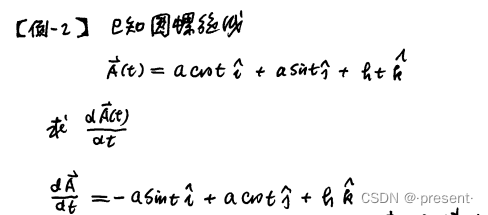
一个很典型的例子,就是我们熟知的螺旋线
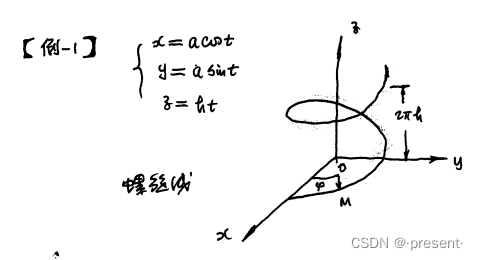
它对应的矢量函数,我们也可以直接写出来

三.矢量函数导数和微分
1.导数
标量函数的导数,我们已经很熟悉了,利用的就是逼近的思想.
类比于标量函数的导数,我们也可以得到矢量函数的导数.
也就是分别对每一项的标量函数对t进行求导即可.
还可以简写为另一种形式
![]()
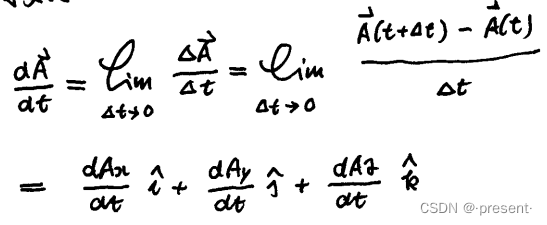
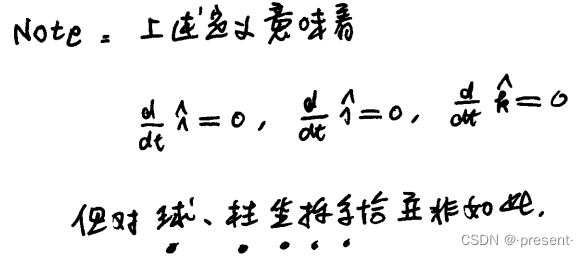
当然看上去很容易理解,不过其中却隐含着一个条件.
也就是在正交直角坐标系中,单位矢是不随时间t变化而变化的,在其它坐标系就未必是这样的情
况.(如果随时间t变化而变化,则每一个分量求导,会出现两项,比如说分别对Ax求导,单位矢不求
导,加上对Ax不求导,单位矢求导)
举一个具体的例子,像上面我们所举的例子,对螺旋线进行求导,就是对每一个分量进行求导.
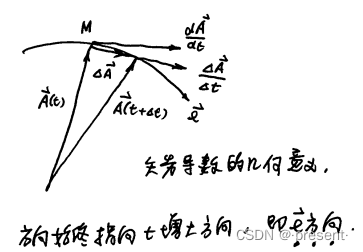
2.导数的几何意义
矢量函数的导数,我们需要借助矢端曲线来理解.
分式部分的两个矢量相减,实际上仍旧是一个矢量,当变化时间t无限趋近于0时,得到的矢量,实
际上是矢端曲线的切线,方向始终指向t增加的方向.
3.微分
我们依旧从标量函数出发,进而引入矢量函数的微分.
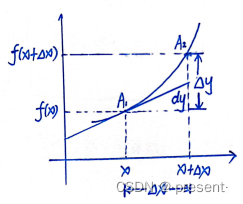
标量函数的增量我们表示为下面这种形式,自变量变化后对应的因变量相减就是标量函数的增量.
![]()
现在我们想要将增量用另一种形式表示,或者更具体来说,近似
用什么方法来近似呢?微积分的思想,化曲为直,于是我们想到用直线去近似,用均匀表示非均匀
我们把增量表示为下面这种形式
![]()
其中我们把前面的部分就称为标量函数在点x0处相对于自变量增量x的微分,记为
![]()
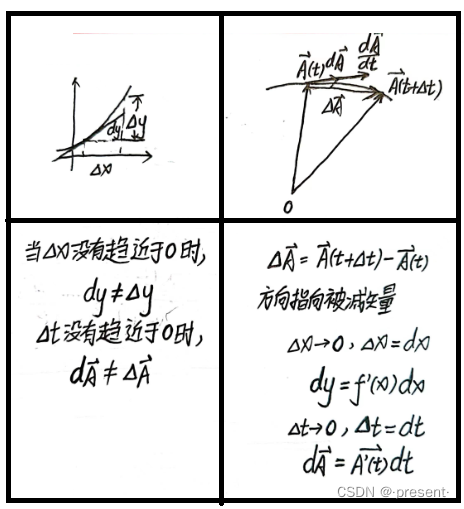
但是我们不能说微分就等同于标量函数的增量,这只是一种近似,两者之间相差一个高阶无穷
小,像图中的dy很明显就不等同于标量函数的增量.
但是在x变化无限趋近于0时,高阶无穷小的一项,就无限逼近于0,这时候我们就可以用dy来近似
等同于标量函数的变化.像图中的A2点无限靠近A1点时,就会有![]()
此时![]()
得到最终dy的具体表达式,![]()
由上面的表达式我们也可以知道什么是微分?
微分是函数改变量的线性主部,线性是由于它表示的形式是一个一次函数的形式,A是一个常数,
等于该点处的导数,主部说明它只是一种近似,而非完全等同.
那具体矢量函数的微分要如何定义呢?
同样的,有了标量函数的微分,而矢量函数中存在三个标量函数,分别对其求微分就是矢量函
数的形式,下面的式子只是把dt乘过去式子右边而已.
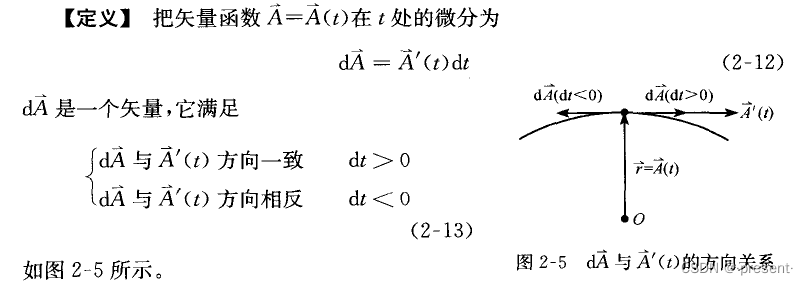
当然,需要注意两者的区别,标量函数求微分得到的是数,但是矢量函数求微分得到的是矢量,它
也有方向,与dt直接相关,如果dt>0,则和矢量函数求导的方向一致,反之,则相反
4.矢量导数性质
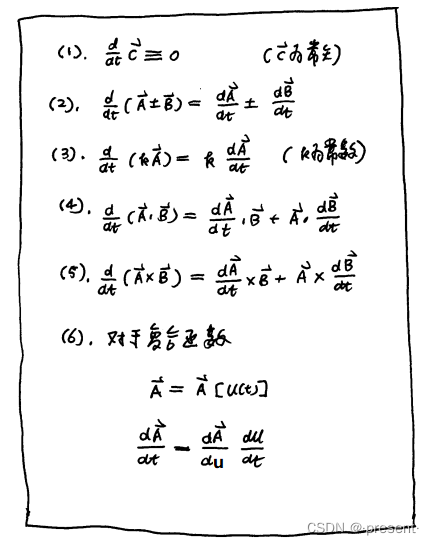
由于矢量函数求导,本质是对标量函数求导,所以标量函数求导存在的性质,也都对应存在
比如说常数可以提出,常数求导为0等等,也指出来向量求导一个重要的特性——线性
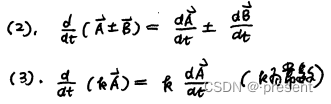
(与之还可以联想到矩阵,矩阵同样也是一种线性运算)
有两点需要注意
第一.假如两个矢量都分别与要求导的变量相关,则需要分别进行求导
比如![]() ,就要先对前面的A矢量求导,后面看作常数,再对后面的A矢量求导,前面看作常数
,就要先对前面的A矢量求导,后面看作常数,再对后面的A矢量求导,前面看作常数
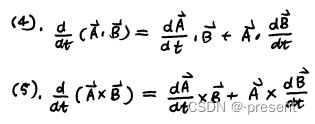
第二.矢量函数求导依旧满足复合函数求导法则

5.例题
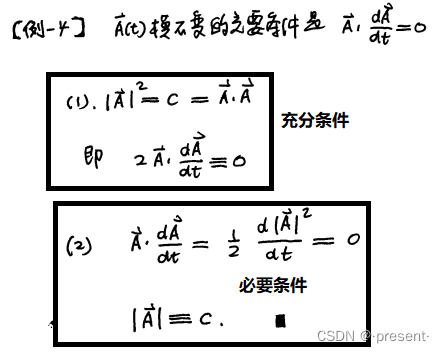
我们知道单位矢的模是始终不变的,所以,由上面的例题,我们还可以得出一个重要的结论

单位矢和其导数相点积,得到的结果为0,两个矢量是正交的.
四.矢量导数的应用
把握思想:
1.平行矢量,两者对应分量成比例
2.两矢量相正交,点积为0
1.几何应用
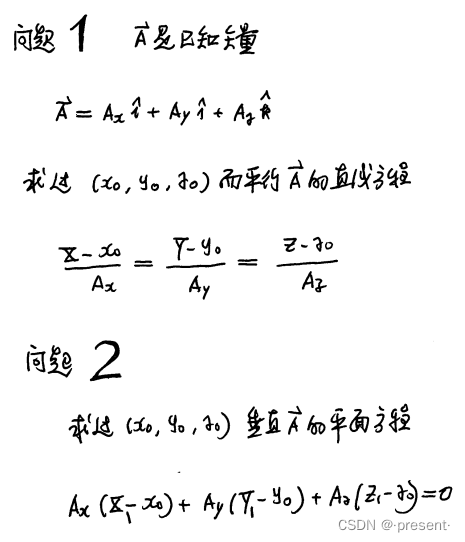
1.曲线的切线和法平面
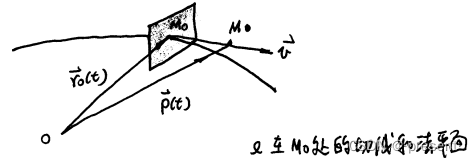
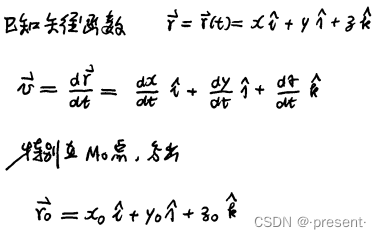
对矢径求导,就是速度的定义
由前面矢量函数的求导我们可以知道,矢径也是矢量,对其求导,它的方向就是对应切线方向
引入切线上的动点M,我们知道MM0矢量,必定和速度平行,对应分量成比例,由于动点是变化
的,得到的表达式就是对应的曲线方程

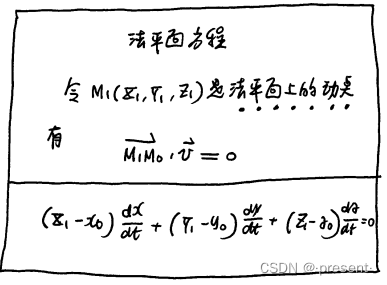
同样的,令M1是法平面上的动点,M1M0矢量必定和速度垂直, 有两矢量相正交,点积为0,
由于动点是变化的,得到的表达式就是对应的曲线法平面方程
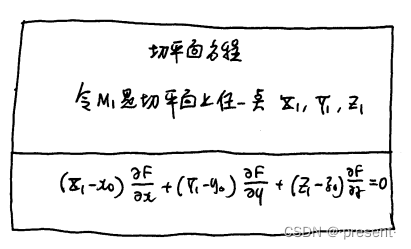
2.曲面的法线和法平面
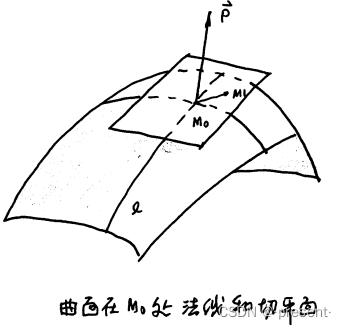
我们先假设出曲线方程F(x,y,z) = 0
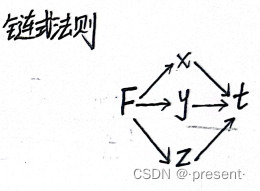
根据链式法则,对等式两边分别进行求导,我们就可以得到两个矢量点积的形式
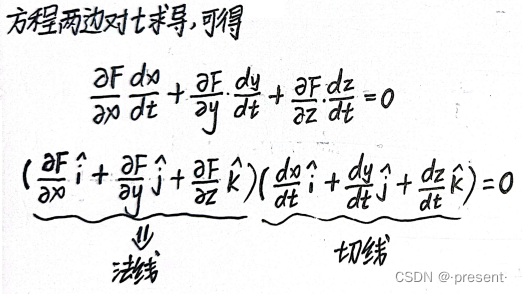
其中后面的我们可以发现,就是我们对应的速度,也就是切线,那和我们切线点积为0的矢量,对
应的就是我们的法线,在后面我们也会提到,这其实就是我们的梯度
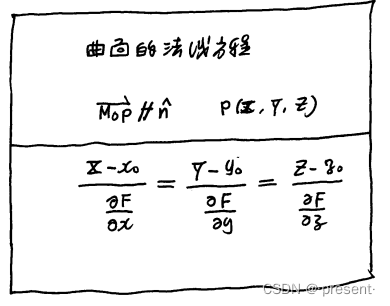
有了法线,准确来说,是和法线方向的矢量,我们同样设其上的一个动点为P,PM0矢量,必定和
法线平行,对应分量成比例,由于动点是变化的,得到的表达式就是对应曲面的法线方程
同样的,令M1是法平面上的动点,M1M0矢量必定和法线垂直, 有两矢量相正交,点积为0,
由于动点是变化的,得到的表达式就是对应的曲面的切平面方程
2.物理应用
三维直角坐标下,存在着无穷多个位矢,密密麻麻,如果全部画出来,还没分析问题,估计就已经
晕了
所以,我们抽象出来,把矢量和点相对应,坐标单位矢都是相同的,不同的仅仅只是坐标分量
这就是每个点坐标(x,y,z)的来源
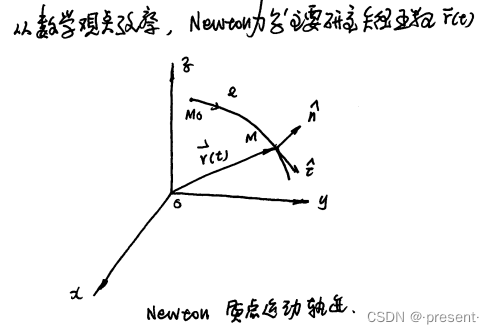
从这里也可以看出矢径函数,描绘了三维笛卡尔直角坐标系的位置变化,即质点的运动轨迹
对其求导,得到的切线方向矢量,就是速度

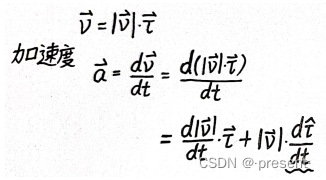
速度除与相应的模,得到的就是切向单位矢

加速度,我们定义对速度求导
切向单位矢,其模长虽然不会随时间发生变化,但是方向不断在改变,所以速度要对时间t求导,
切向单位矢也要对时间t求导
前面的矢量,方向为切线方向,我们称之为切向加速度
那后面的矢量是什么呢?我们依旧需要确定它的方向和大小

我们可以结合图形来理解,![]()
PS:箭头指向被减矢量
当距离不断缩短的时候,我们可以发现![]() 的方向其实是与法线相反的方向
的方向其实是与法线相反的方向
不过更为简单的一种理解方法是,前面我们已经得到模长不变的矢量,它满足下面这个表达式
所以 ![]() 必定为法线方向
必定为法线方向

那这个矢量的大小为多少呢?
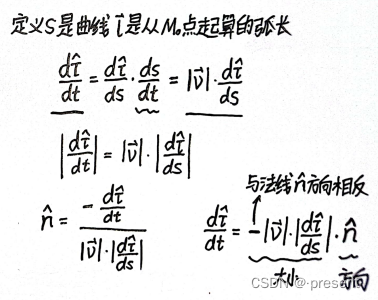

我们最终可以化简出来加速度的表达式
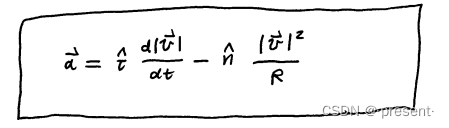
前面一项我们称之为切向加速度,后面一项我们称之为法向加速度
3.两大典型问题
推广到任意的矢量,而不仅仅是局限于矢径.
不过思想仍然是前面的思想,对应分量成比例,与两矢量点积为0,其相互正交.
五.矢量函数的积分
对每一个分量(标量函数)做积分,就是矢量函数的积分
不过需要注意,只有在笛卡尔坐标系下的坐标单位矢不参与积分.