.text
.global _start
_start: @设置GPIO寄存器的时钟使能 RCC_MP_AHB4ENSETR[4]->1 0x50000a28LDR R0,=0x50000A28LDR R1,[R0] @从R0为起始地址的4个字节数据取出放入R1中ORR R1,R1,#(0x1<<4) @第四位设置为1STR R1,[R0] @写回LDR R0,=0x50000a28LDR R1,[R0]ORR R1,R1,#(0x1<<5)STR R1,[R0]LDR R0,=0x50000a28LDR R1,[R0]ORR R1,R1,#(0x1<<4)STR R1,[R0]@设置PE10管脚为输出模式 GPIOE_MODER[21:20]->01 0x50006000LDR R0,=0x50006000LDR R1,[R0]BIC R1,R1,#(0x3<<20) ORR R1,R1,#(0x1<<20)STR R1,[R0]LDR R0,=0x50007000LDR R1,[R0]BIC R1,R1,#(0x3<<20)ORR R1,R1,#(0x1<<20)STR R1,[R0]LDR R0,=0x50006000LDR R1,[R0]BIC R1,R1,#(0x3<<16) ORR R1,R1,#(0x1<<16)STR R1,[R0]@设置PE10管脚为推挽输出 GPIOE_OTYPER[10]->0 0x50006004LDR R0,=0x50006004LDR R1,[R0]BIC R1,R1,#(0x1<<10)STR R1,[R0]LDR R0,=0x50007004LDR R1,[R0]BIC R1,R1,#(0x1<<10)STR R1,[R0]LDR R0,=0x50006004LDR R1,[R0]BIC R1,R1,#(0x1<<8)STR R1,[R0]@设置PE10管脚为低速输出 GPIOE_OSPEEDR[20:21]->00 0x50006008LDR R0,=0x50006008LDR R1,[R0]BIC R1,R1,#(0x3<<20)STR R1,[R0]LDR R0,=0x50007008LDR R1,[R0]BIC R1,R1,#(0x3<<20)STR R1,[R0]LDR R0,=0x50006008LDR R1,[R0]BIC R1,R1,#(0x3<<16)STR R1,[R0]@设置PE10管脚输出时没有上拉下拉电阻 GPIOE_PUPDR[20:21]->00 0x5000600cLDR R0,=0x5000600cLDR R1,[R0]BIC R1,R1,#(0x3<<20)STR R1,[R0]LDR R0,=0x5000700cLDR R1,[R0]BIC R1,R1,#(0x3<<20)STR R1,[R0]LDR R0,=0x5000600cLDR R1,[R0]BIC R1,R1,#(0x3<<16)STR R1,[R0]@PE10输出高低电平 GPIOE_ODR[10]->1(高电平) 0(低电平) 0x50006014@LED1亮灭交替
LOOP1:@先亮LDR R0,=0x50006014LDR R1,[R0]ORR R1,R1,#(0x1<<10)STR R1,[R0]BL delay@再灭LDR R0,=0x50006014LDR R1,[R0]BIC R1,R1,#(0x1<<10)STR R1,[R0]BL delayB LOOP2LOOP2:LDR R0,=0x50007014LDR R1,[R0]ORR R1,R1,#(0x1<<10)STR R1,[R0]BL delayLDR R0,=0x50007014LDR R1,[R0]BIC R1,R1,#(0x1<<10)STR R1,[R0]BL delayB LOOP3LOOP3:LDR R0,=0x50006014LDR R1,[R0]ORR R1,R1,#(0x1<<8)STR R1,[R0]BL delayLDR R0,=0x50006014LDR R1,[R0]BIC R1,R1,#(0x1<<8)STR R1,[R0]BL delayB LOOP1@封装延时函数delay:LDR R4,=#0x10000000
mm:cmp R4,#0SUBNE R4,R4,#1BNE mmMOV PC,LR @程序返回
.endLED灯亮灭
news/2024/11/28 23:52:08/
相关文章

买房需要了解的一些事
注:本文写于 2021年06月26日 是当时个人的看法, 因前段时间公众号全清空删除了,现在重新发出来。
近段时间二手房贷款全面收紧,对炒房行为应该能起到一定的抑制作用,个人觉得这是好事,(炒房客不…
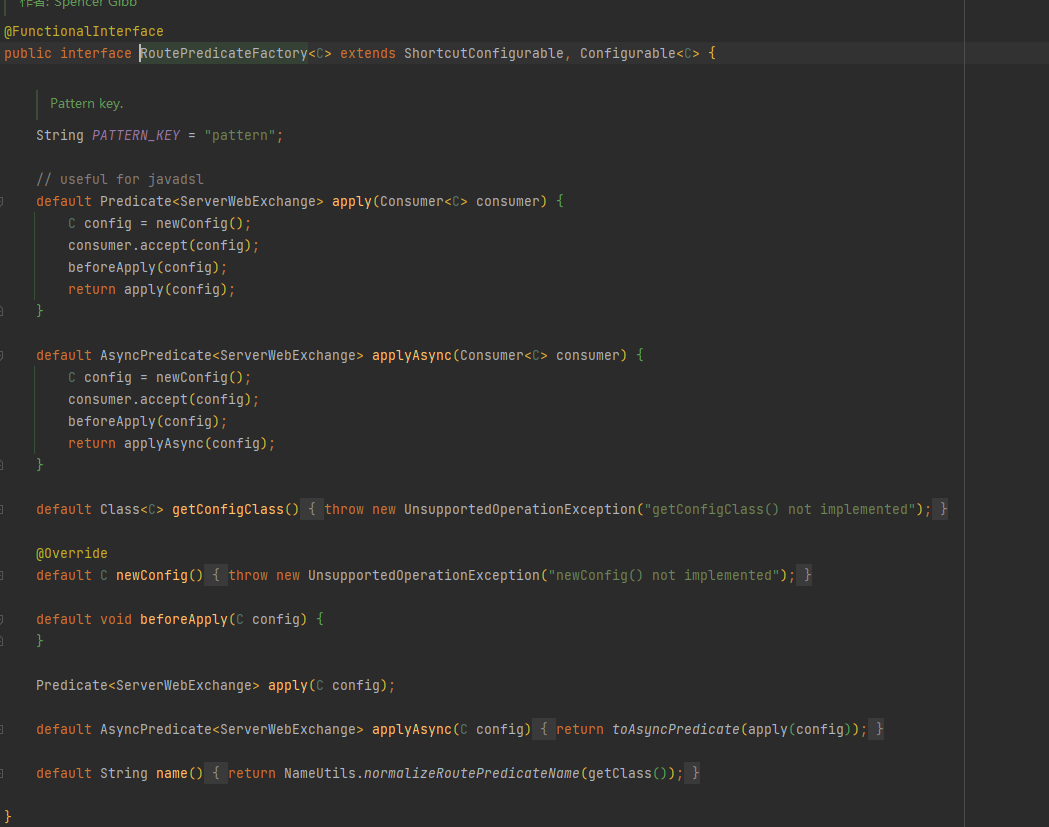
Spring Cloud Gateway2之断言Predicate详解
文章目录 1. 前言2. Spring Cloud Gateway断言的种类及各自功能2.1. Path断言 PathRoutePredicateFactory2.2.Method断言 MethodRoutePredicateFactory2.3.Header断言 HeaderRoutePredicateFactory2.4.Host断言 HostRoutePredicateFactory2.5.Query断言 QueryRoutePredicateFac…
sparksql 中的concat_ws 和sort_array 和collect_list的使用方法
1. concat_ws函数: - concat_ws用于将多个字符串连接成一个以指定分隔符分隔的单个字符串。 - 语法:concat_ws(separator, str1, str2, ...) - 示例: sql SELECT concat_ws(,, apple, banana, cherry) AS fruits; …
Vue14 监视属性简写
监视属性简写
当监视属性只有handler时,可以使用简写
<!DOCTYPE html>
<html><head><meta charset"UTF-8" /><title>天气案例_监视属性_简写</title><!-- 引入Vue --><script type"text/javascript&…
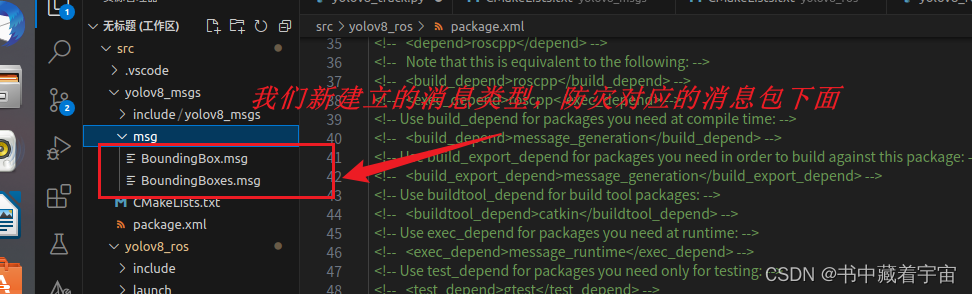
yolov8封装进入ROS系统
一,yolov8的环境配置工作 说明:需要相关工程全部源码的可私聊博主或评论留言 配置工作可以参考我的一篇关于yolov8环境配置的博客。 需要说明的是:直接使用: pip install ultralytics 会导致后面对于网络结构的改进无法运行。所以如果需要对网络结构进行改进的同学,不要使用…

ElementUI结合Vue完成主页的CUD(增删改)表单验证
目录
一、CUD
( 1 ) CU讲述
( 2 ) 编写
1. CU
2. 删除
二、验证
前端整合代码 : 一、CUD 以下的代码基于我博客中的代码进行续写 : 使用ElementUI结合Vue导航菜单和后台数据分页查询 ( 1 ) CU讲述 在CRUD操作中,CU代表创建(Create)…
渗透测试信息收集方法笔记
一、指纹识别 1、钟馗之眼https://www.zoomeye.org/ 2、天眼查https://www.tianyancha.com/ 3、工具:御剑WEB指纹识别系统正式版,可以查网站用了哪些框架,什么版本,有哪些漏洞 4、kali whatweb 二、信息泄露 1、csdn https://www.…