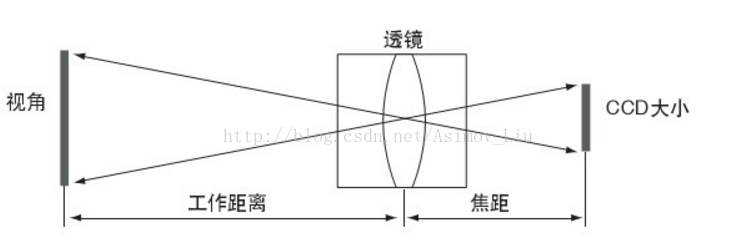
1 焦距(Focal Length)
记为  ,从镜头中心点到胶平面上所形成的清晰影像之间的距离。一般情况下,焦距越大,工作距离越大,视角越小;焦距越小,工作距离越小,视角越大。
,从镜头中心点到胶平面上所形成的清晰影像之间的距离。一般情况下,焦距越大,工作距离越大,视角越小;焦距越小,工作距离越小,视角越大。
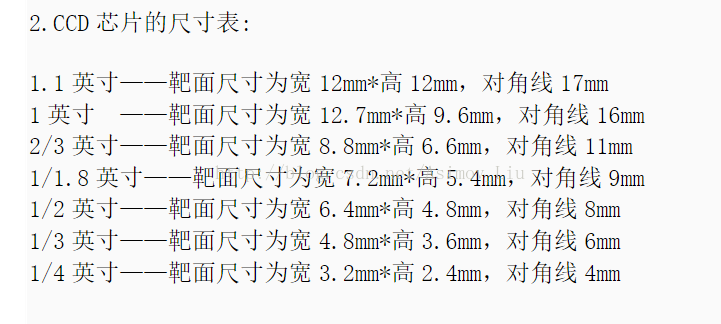
2 CCD芯片的尺寸(Sensor Size)
正常的 1英寸=25.4mm;
CCD相机沿用的 1英寸=16mm 且为对角线长度;
镜头可支持的最大CCD尺寸应大于等于选配相机CCD芯片尺寸。
3 光圈系数(Iris)
其中,  是镜头焦距,
是镜头焦距,  是通光孔的直径。
是通光孔的直径。  值越大,光圈越小。相对孔径和光圈系数互为倒数。光圈系数是镜头的重要内部参数,它就是镜头相对孔径的倒数,光圈系数的标称值数字越大,也就表示其实际光圈就越小。一般的厂家都会用F数来表示这一参数。镜头的光圈排列顺序是:1、1.4、2.0、2.8、3.5、4.0、5.6、8.0、11、16、22、32等等, 的大小是通常通过改变光圈调整环的大小来设置的。随着数值的增大,其实际光孔大小也就随之减小,而其在相同快门时间内的光通量也就随之减小。光圈可以控制镜头的进光量,也就是光照度,还可以调节景深,以及确定分辨率下系统成像的对比度,从而影响成像质量。
值越大,光圈越小。相对孔径和光圈系数互为倒数。光圈系数是镜头的重要内部参数,它就是镜头相对孔径的倒数,光圈系数的标称值数字越大,也就表示其实际光圈就越小。一般的厂家都会用F数来表示这一参数。镜头的光圈排列顺序是:1、1.4、2.0、2.8、3.5、4.0、5.6、8.0、11、16、22、32等等, 的大小是通常通过改变光圈调整环的大小来设置的。随着数值的增大,其实际光孔大小也就随之减小,而其在相同快门时间内的光通量也就随之减小。光圈可以控制镜头的进光量,也就是光照度,还可以调节景深,以及确定分辨率下系统成像的对比度,从而影响成像质量。
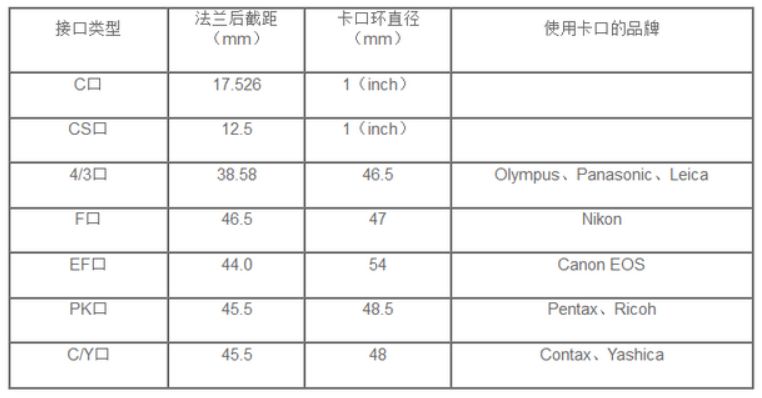
4 接口(Mount)
镜头与相机的连接方式有C/CS/F等,C/CS基本可以通用,螺纹直径均为25mm,只是长度不同,可以用转接环配合。

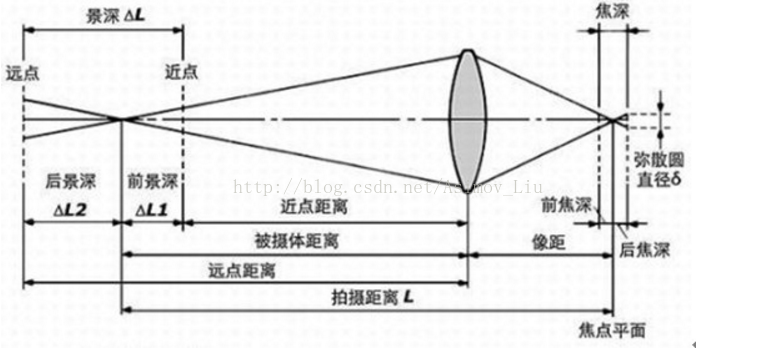
5 景深
被拍摄物体聚焦清楚后,在物体前后一定距离内,其影像仍然清晰的范围。光圈越大,景深越小;光圈越小,景深越大;焦距越长,景深越小;焦距越短,景深越大。距离拍摄物体越近时,景深越小。
6 分辨率(Resolution)
分辨率(Resolution)又称分辨力、鉴别率、鉴别力、分析力、解像力和分辨本领,是指摄影镜头清晰地再现被摄景物纤微细节的能力。镜头的分辨率是指在成像平面上1mm间距内能分辨开的黑白相间的线条对数,它的单位是“线对/毫米”。 显然分辨率越高的镜头,所拍摄的影像越清晰细腻。它的优点是可以量化,用数据表示,使结果更直观、更科学、更严密。
分清传感器水平或者垂直方向上的像素大小,及该方向上物体的尺寸,可以计算出每个像元表示的物体大小,从而计算出分辨率,有助于选择镜头与传感器的最佳配合。
分辨率表示了镜头的解像能力,单位为lp/mm。光学系统的分辨率取决于传感器的像素,分辨率的最终确定,还取决于所选取的相应镜头的成像质量。
Pixel size为像元尺寸,分辨率计算为如下公式:
例如: pixel size=3.45 um×3.45 um, Number of pixels(H×V)=2048×2050的传感器,视场大小为100 mm,则:
传感器尺:
放大率:
该系统物空间分辨率:
7 工作距离(Working distance WD)
镜头第一个工作面到被测物体的距离。也是镜头能够清晰观察到被测物体的最远距离。一般焦距越大,工作距离越大,反之焦距小,工作距离小。
8 视野范围(Field of View, FOV)
相机实际拍到区域的尺寸。一般分为水平  ,和垂直 ,也被称为视场角。一般情况下,焦距越大,视场角越小,焦距小,视场角大,大的视场角容易产生畸变,常见于广角相机和360全景相机中。
,和垂直 ,也被称为视场角。一般情况下,焦距越大,视场角越小,焦距小,视场角大,大的视场角容易产生畸变,常见于广角相机和360全景相机中。
9 光学放大倍数(Magnification)
CCD/FOV
10 数值孔径(Numerical Aperture, NA)
11 后背焦(Flange distance)
指相机接口平面到芯片的距离。在线扫描镜头或者大面阵相机的镜头选型时,后背焦是一个非常重要的参数,它直接影响镜头的配置。
12 信噪比
摄像机的图象信号与它的噪声信号之比,用 S/N表示。 S表示摄像机在假设元噪声时的图像信号值, N表示摄像机本身产生的噪声值(比如热噪声),二者之比即为信噪比,用分贝(dB)表示。信噪比越高越好,典型值为46dB。