光学镜头的主要参数
焦距
主点到焦点的距离称为光学系统的焦距,这是镜头的重要参数之一,它决定了像与实际物体之间的比例。在物距一定的情况下,要得到大比例的像,则要求选用长焦距的镜头。
如图2所示,自物方主点H到物方焦点F的距离称为物方焦距或前焦距f;类似地,自像方主点H '到物方焦点F '的距离称为物方焦距或前焦距f '。其定义具有方向性,如果主点到焦点的方向与光线的方向一致,则焦距为正;反之则为负。图2中所示的情况,像方焦距f '>0,物方焦距f '<0。如果系统两侧的介质相同,则f '=-f。
相对孔径与光圈数F数
相对孔径为入瞳直径与焦距的比值D/f ' ,它主要影响像面的照度,照相镜头像面的照度与相对孔径的平方成正比。为了满足景物较暗时摄影的需要,或者为了对高速运动物体摄影,要求采用很短的曝光时间,它们都要求提高像面的照度,因此就需要采用大的相对孔径。
镜头通常采用光圈数F来表示通光孔径的大小,光圈数F数为相对孔径的倒数,即F=f ' / D
视场角与像面尺寸
镜头的视场角决定了被拍摄景物的范围。由于摄影系统一般是对远处景物成像,所以其像面通常位于焦平面附近,因此像面大小与视场角2W ' 的关系可表示为公式y ' =f ' tanW '
公式中y ' 应该是像面区域的半径。
目前,工业相机通常使用CCD或者CMOS传感器作为像面接收器,有面阵和线阵两种,其工作区域的形状分别为矩形或线形,传感器的工作区域必须包含在镜头所确定的像面圆形区域之内。在镜头的参数中,也经常使用传感器的大小来表示视场大小。
面阵传感器是由许多像素单元组成的一个矩形阵列,每个像素单元都是一个方形传感器。面阵传感器的大小通常是以其对角线的长度来表示的。目前常用的面阵传感器有:
|
| 1英寸 | 2/3英寸 | 1/2英寸 | 1/3英寸 | 1/4英寸 |
| 对角线(mm) | 16 | 11 | 8 | 6 | 4 |
| 幅面尺(mm) | 12.8×9.6 | 8.8×6.6 | 6.4×4.8 | 4.8×3.6 | 3.6×2.7 |
线阵传感器也是由许多像素单元组成,与面阵传感器不同的是,这些像素单元排成一个单列。线阵传感器的大小则是以像素单元的数量和大小来表示的。线阵传感器的规格有1K、2K、4K、8K、12K等,像素单元有5µm、7µm、10µm、14µm等。
对于同一个传感器,长焦距的镜头只能有较小的视场角,能对远处景物拍摄得比较大的像,适宜于远距离摄影,故常称之为望远镜头;而短焦距的镜头则有较大的视场角,能将近处较大范围内的景物摄入像面,故又称之为广角镜头,视场角更大的又称为鱼眼镜头;介于二者之间,焦距属于中等,约等于幅面对角线长度的镜头,称之为标准镜头。
工作波长
光学镜头都是针对一定波长范围内的光波工作,自物面发出的光波,在此波长范围内的,能够通过镜头在像面上成一清晰像,而且能量衰减较小;而在此范围外的光波,则难以校正像差,成像质量差,分辨率低,而且能量衰减很大,甚至被光学介质材料所吸收,完全不能通过镜头。
光就其本质来说就是电磁波,按照波长通常将其划分成不同的光谱波段,如下表所示:
| 波 段 | 符号 | 波长(nm) | |
| 紫外 | 真空紫外 | VUV | 100~200 |
| 远紫外 | FUV | 200~280 | |
| 中紫外 | Middle UV | 280~315 | |
| 近紫外 | Near UV | 315~380 | |
| 可见 | 紫 | Violet | 380~424 |
| 蓝 | Blue | 424~486 | |
| 蓝绿 | Blue green | 486~517 | |
| 绿 | Green | 517~527 | |
| 黄绿 | Yellow green | 527~575 | |
| 黄 | Yellow | 575~585 | |
| 橙 | Orange | 585~647 | |
| 红 | Red | 647~780 | |
| 红外 | 近红外 | NIR | 780nm-3mm |
| 中红外 | MIR | 3mm-50mm | |
| 远红外 | FIR | 50mm-1mm | |
分辨率
分辨率是评价镜头质量的一个重要参数,定义为在像面除镜头在单位毫米内能够分辨开的黑白相间的条纹对数,如图4所示,

图4 分辨率条纹
分辨率为1/2d,其中,d为线宽。分辨率的单位为为lp/mm(线对/毫米)。
在理想成像镜头的焦平面上能分辨开来的二条纹之间的相应间距
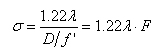
其倒数即为理想镜头的分辨率

公式中,λ为中心波长,单位为毫米。可见,理想镜头的分辨率完全由相对孔径所决定,相对孔径越大,F/#越小,分辨率就越高。按此公式决定的只是视场中心的分辨率,在视场边缘,由于成像光束的孔径角比轴上点小,因此分辨率有所降低。
实际的摄影镜头,由于有比较大的剩余像差,其分辨率要比理想镜头的分辨率低得多。因此,通常使用调制传递函数(MTF:Modulation Transfer Function)来表征镜头的实际分别率。调制传递函数MTF定义为在一定空间频率时像面对比度与物面对比度之比,这里空间频率以单位毫米内的线对数来表示,其单位为lp/mm。对于一个镜头,不同的空间频率处的MTF是不同的,一般来说,随着空间频率的增大,MTF越来越小,直至为零,MTF为零时的空间频率称为镜头的截止频率。一些镜头厂家为了表示方便,通常也以镜头的截止频率来替代MTF,用以表示镜头的分辨率。
在实际工业应用中,系统使用面阵或线阵传感器作为成像器件,因此系统的分辨率通常也会受到成像传感器中像元分辨率的限制。像元分辨率定义为单位毫米内像素单元数的一半,即

其中p为像素单元的尺寸大小,例如一个CCD的像元尺寸大小为5×5微米,则像元分辨率则为:
![]()
传感器的像元分辨率限制了系统的最高分辨率,即使镜头的分辨率再高,系统也不可能分辨高于像元分辨率的细节。然而在实际使用中,由于景深的存在,为了使镜头偏离对准面仍然能够成像清晰,因此,在选择镜头时,通常要求镜头分辨率要略高于像元分辨率,这样才能使系统的分辨率达到传感器所限制的最高分辨率。
畸变
对于理想光学系统,在一对共轭的物像平面上,放大率是常数。但是对于实际的光学系统,仅当视场较小时具有这一性质,而当视场较大或很大时,像的放大率就要随着视场而异,这样就会使像相对于物体失去相似性。这种使像变形的成像缺陷称为畸变。
畸变定义为实际像高y ' 与理想像高y0 ' 之差y ' -y0 ' ,而在实际应用中经常将其与理想像高y0 ' 之比的百分数来表示畸变,称为相对畸变,即
![]()
有畸变的光学系统,若对等间距的同心圆物面成像,其像将是非等间距的同心圆。当系统具有正畸变时,实际像高y ' 随视场的增大比理想像高y0 ' 增大得快,即放大倍率随视场的增大而增大,则同心圆的间距自内向外逐渐增大;反之,当为负畸变时,圆的间距自内向外逐渐减小。若物面为如图5(a)所示的正方形网格,那么,由正畸变的光学系统所成的像呈枕形,如图5(b);由负畸变光学系统所成的像呈桶形,如图5(c)。图中虚线所示是理想像。
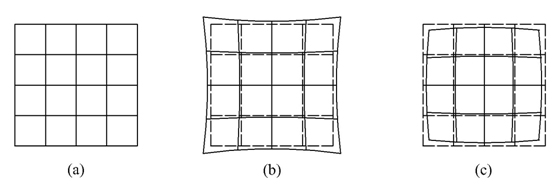
图5 畸变
畸变在光学系统中只引起像的变形,对像的清晰度并无影响。因此,对于一般的光学系统,只要感觉不出它所成像的变形,这种成像缺陷就无妨碍。但是对于某些要利用像来测定物体大小尺寸的应用,畸变的影响就非常重要了,它直接影响测量精度,必须予以严格校正。
景深
当把物镜调焦到某一摄影对象时,在该对象的前后能在像面上呈清晰像的范围,称为景深。如图6所示,景深就是Δ1+Δ2。像平面A’为传感器靶面所在平面,其共轭平面A为对准平面。能在靶面上呈清晰像的最远平面,即物点B1所在的平面,称为远景,能在靶面上呈清晰像的最近平面,即物点B2所在的平面,称为近景。物点B1、B2分别成像于靶面前后,投影到靶面上成为弥散斑,当弥散斑小到一定程度时可认为是清晰的像。 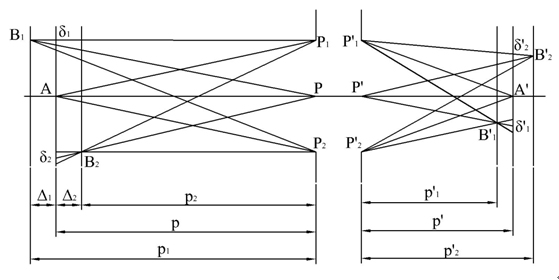
图6 景深
景深的计算公式为: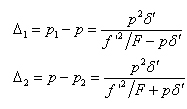
式中,Δ1和Δ2分别为远景深度和近景深度,p、p1和p2分别为调焦平面、远景平面和近景平面到物镜的距离,f '为物镜的焦距,F为物镜的光圈数, δ为像面上可允许的弥散圆直径,在CCD或CMOS上其最小值为像元尺寸。
可见,景深与物镜的焦距、光圈大小和摄影距离有关。光圈越小(F数越大),或摄影距离越大,景深就越大,但远景深度要比近景深度大。若在同一距离用同一光圈值摄影时,焦距短的镜头,具有大的景深;反之,长焦距镜头的景深就小。
工作距离
在选择镜头时,为了确定系统的空间尺寸,往往需要了解镜头工作时的物距、像距以及镜头的两个主面之间的距离等参数。然而,物距、像距均是相对与镜头光学系统的主面位置而言的,而镜头的主面却难以直接确定,因此物距、像距等参数也难以直接测量得到。于是,镜头厂家提出了工作距离这一参数,同时也给出了在该工作距离处镜头的放大倍率,以方便使用者确认系统的空间尺寸。
然而,目前对于工作距离的定义还没有形成统一意见,主要有两种定义。第一种定义是指被摄物体到相机底片的距离;另一种定义是指被摄物体到镜头前端面的距离。目前,大部分相机镜头厂家均采用第一种定义,因此,在没有特殊说明的情况下,手册中给出的工作距离既是第一种定义。
相机接口
在光学系统中,最后一个光学镜片表面的顶点到像面的距离称为后截距(BFL:Back Focal Length),对于不同的光学系统,其后截距都是不一样的。因此在安装镜头时,需要调节镜头到相机的相对位置,使相机底片到镜头最后一面顶点的距离满足后截距的要求,即使底片位于镜头的像平面上。
相机接口即为相机和镜头的连接方式,同时也保证了相机和镜头的相对位置。早期的相机一般采用螺纹接口。随着相机的不断发展,接口需要传递更多的数据信息,螺纹接口已不能满足相机的要求了。1959年,尼康、佳能、美能达这三大日本相机厂家各自推出了各自的相机接口,随后宾得、莱卡、奥林巴斯等其它厂家也相继推出的自己的相机接口。
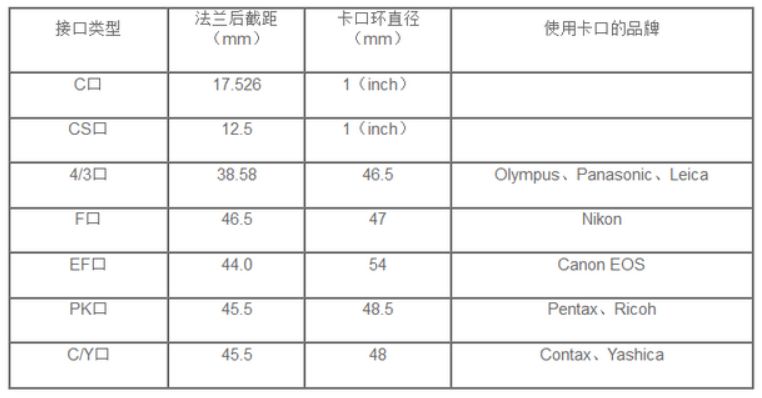
随着技术不断进步,相机功能不断完善,各个厂家的相机接口也几经变换。目前,常用的一些接口类型如下表所示:
| 接口类型 | 法兰后截距(mm) | 卡口环直径(mm) | 使用卡口的品牌 |
| C口 | 17.526 | 1(inch) |
|
| CS口 | 12.5 | 1(inch) |
|
| 4/3口 | 38.58 | 46.5 | Olympus、Panasonic、Leica |
| F口 | 46.5 | 47 | Nikon |
| EF口 | 44.0 | 54 | Canon EOS |
| PK口 | 45.5 | 48.5 | Pentax、Ricoh |
| C/Y口 | 45.5 | 48 | Contax、Yashica |
在上表中,法兰后截距(Flange Back Focal Length)是指相机接口的定位面到底片的距离,它保证了镜头的像面与相机的底片重合。这样,不仅为相同接口的相机和镜头的连接提供了非常方便的方式,而且也为不同接口之间的相互转换提供了依据。
光学系统的一些计算公式
在选择镜头时,通常需要了解一些预先给出的条件,如物距或工作距离、放大倍率等,根据这些条件,可以大致近似推算出系统的一些主要参数,并以此作为选择镜头的参考。根据上述的高斯公式和放大率公式,我们可以推出下面几个常用公式
物距 ![]()
像距 ![]()
焦距 ![]()
物高 ![]()
像高 ![]()
镜头选择
在摄影光学系统中,镜头是重要的一个部件,它直接决定整个系统的参数和性能。因此选择一个合适的镜头,是系统设计过程中至关重要的一步工作。在选择过程中,需要充分考虑如下几个方面的因素:
- 目标尺寸和测量精度
- 传感器尺寸和像素尺寸
- 放大倍率
- 光阑大小
- 工作距离
- 系统尺寸
- 工作波长
- 景深
- 畸变
- 相机接口
- 传感器类型,如彩色还是黑白、是否带红外滤镜
- 对于电机驱动镜头,需要考虑驱动信号类型
- 是否有红外滤波要求
- 环境要求,如温度、震动、防尘等
摄影镜头的基本光学性能由焦距、相对孔径和视场角这三个参数表征。因此,在选择镜头时,首先需要确定这三个参数,然后考虑分辨率、景深、畸变、接口等其他因素。
选择镜头的基本步骤可以参考以下几条:
- 根据目标尺寸和测量精度,可以确定传感器尺寸和像素尺寸、放大倍率以及镜头的传递函数,这可能会有好几个选择,因此需要选择一个最为合适的组合;
- 根据系统尺寸和工作距离,结合放大倍率,可以大概估算出镜头的焦距,焦距、传感器尺寸确定以后,视场角也就可以计算出来了;
- 根据现场的照明条件确定光圈大小和工作波长;
- 确定畸变、景深、相机接口等其他要求。
至此,基本可以确定一款或几款合适的镜头,然后再根据其它一些非技术要求选择一个最为合适的以供使用。