PX4
2024/10/9 13:22:06
【QGC】把QGroundControl地面站添加到Ubuntu侧边菜单栏启动
把QGroundControl地面站添加到Ubuntu侧边菜单栏启动 简介准备工作步骤 1: 创建 Desktop Entry 文件步骤 2: 编辑 Desktop Entry 文件步骤 3: 刷新应用程序菜单步骤 4: 将 QGroundControl 固定到侧边栏 环境:
Ubuntu :20.04 LTS
简介
QGroundControl 是…
【QGC】把QGroundControl地面站添加到Ubuntu侧边菜单栏启动
把QGroundControl地面站添加到Ubuntu侧边菜单栏启动 简介准备工作步骤 1: 创建 Desktop Entry 文件步骤 2: 编辑 Desktop Entry 文件步骤 3: 刷新应用程序菜单步骤 4: 将 QGroundControl 固定到侧边栏 环境:
Ubuntu :20.04 LTS
简介
QGroundControl 是…

无人机 PX4 飞控 | ROS应用层开发:基础代码框架构建
无人机 PX4 飞控 | ROS应用层开发:基础代码框架构建 基础代码框架构建文件建立代码基本构建测试 基础代码框架构建
本篇博客拟在构建一个 无人机 PX4 飞控 ROS应用层开发 的 基础代码框架。
其中包含了基础类文件、类头文件、main主函数文件,及其编译所…

无人机 PX4 飞控 | 如何检测状态估计EKF性能
无人机 PX4 飞控 | 如何检测状态估计EKF性能 前言检查EKF性能缺少pyulog问题解决脚本崩溃没有输出文件生成对应文件 结语 前言
ECL (Estimation and Control Library,估计和控制库),其中的状态估计使用扩展卡尔曼滤波算法&#x…

无人机 PX4 飞控 | ROS应用层开发:指令(字符串)订阅功能
无人机 PX4 飞控 | ROS应用层开发:指令(字符串)订阅功能 指令(字符串)订阅功能代码测试 指令(字符串)订阅功能
为了通过键盘触发mavros 的不同功能,需要实现一个订阅字符串的功能 该…
无人机 PX4 飞控 | ROS应用层开发:指令(字符串)订阅功能
无人机 PX4 飞控 | ROS应用层开发:指令(字符串)订阅功能 指令(字符串)订阅功能代码测试 指令(字符串)订阅功能
为了通过键盘触发mavros 的不同功能,需要实现一个订阅字符串的功能 该…

QGroundControl连接运行在Docker中的PX4固件模拟器
1.通过docker启动PX4无人机 docker run --rm -it jonasvautherin/px4-gazebo-headless:1.14.3 启动成功: PX4完全启动OK如下: 会看到pxh> INFO [commander] Ready for takeoff!
执行takeoff指令 查看运行docker容器与QGC客户端的主机IP: …

无人机 PX4 飞控 | EKF2简介与使用方法
无人机 PX4 飞控 | EKF2简介与使用方法 PX4 EKF2简介EKF 的启动ecl EKF 的优缺点缺点优点 运行单个EKF实例运行多个EKF实例 PX4 EKF2简介
PX4是一个流行的开源飞控系统,广泛用于无人机和其他自动驾驶飞行器。EKF2(Extended Kalman Filter 2)…

【PX4-AutoPilot教程-TIPS】MAVROS2运行px4.launch文件报错ValueError无法启动的解决方法
MAVROS2运行px4.launch文件报错ValueError无法启动的解决方法 问题描述解决方法 环境:
Ubuntu :20.04 LTS
ROS :ROS2 Foxy
PX4 :1.13.0
问题描述
在使用命令ros2 launch mavros px4.launch命令启动MAVROS2与PX4之间的连接时报…
【PX4-AutoPilot教程-TIPS】MAVROS2运行px4.launch文件报错ValueError无法启动的解决方法
MAVROS2运行px4.launch文件报错ValueError无法启动的解决方法 问题描述解决方法 环境:
Ubuntu :20.04 LTS
ROS :ROS2 Foxy
PX4 :1.13.0
问题描述
在使用命令ros2 launch mavros px4.launch命令启动MAVROS2与PX4之间的连接时报…
Linux系统ubuntu20.04 无人机PX4 开发环境搭建(失败率很低)
Linux系统ubuntu20.04 无人机PX4 开发环境搭建 PX4固件下载开发环境搭建MAVROS安装安装地面站QGC PX4固件下载
PX4的源码处于GitHub,因为众所周知的原因git clone经常失败,此处从Gitee获取PX4源码和依赖模块。
git clone https://gitee.com/voima/PX4-…

【开发环境】PX4无人机实物使用视觉或运动捕捉系统进行位置估计
PX4无人机实物使用视觉或运动捕捉系统进行位置估计 PX4中关于外部位置信息的MAVLink话题参考坐标系EKF2调整配置参数调整EKF2_EV_DELAY参数 与ROS共同使用将OptiTrack MoCap系统提供的姿态数据导入ROSMotive MoCap软件的步骤将姿态数据导入ROS重新映射姿态数据 将姿态数据转发到…
无人机 PX4 飞控 | EKF2简介与使用方法
无人机 PX4 飞控 | EKF2简介与使用方法 PX4 EKF2简介EKF 的启动ecl EKF 的优缺点缺点优点 运行单个EKF实例运行多个EKF实例 PX4 EKF2简介
PX4是一个流行的开源飞控系统,广泛用于无人机和其他自动驾驶飞行器。EKF2(Extended Kalman Filter 2)…
PX4 ROS2 真机
如果仿真跑通了。
真机遇到问题,可参考此文章。
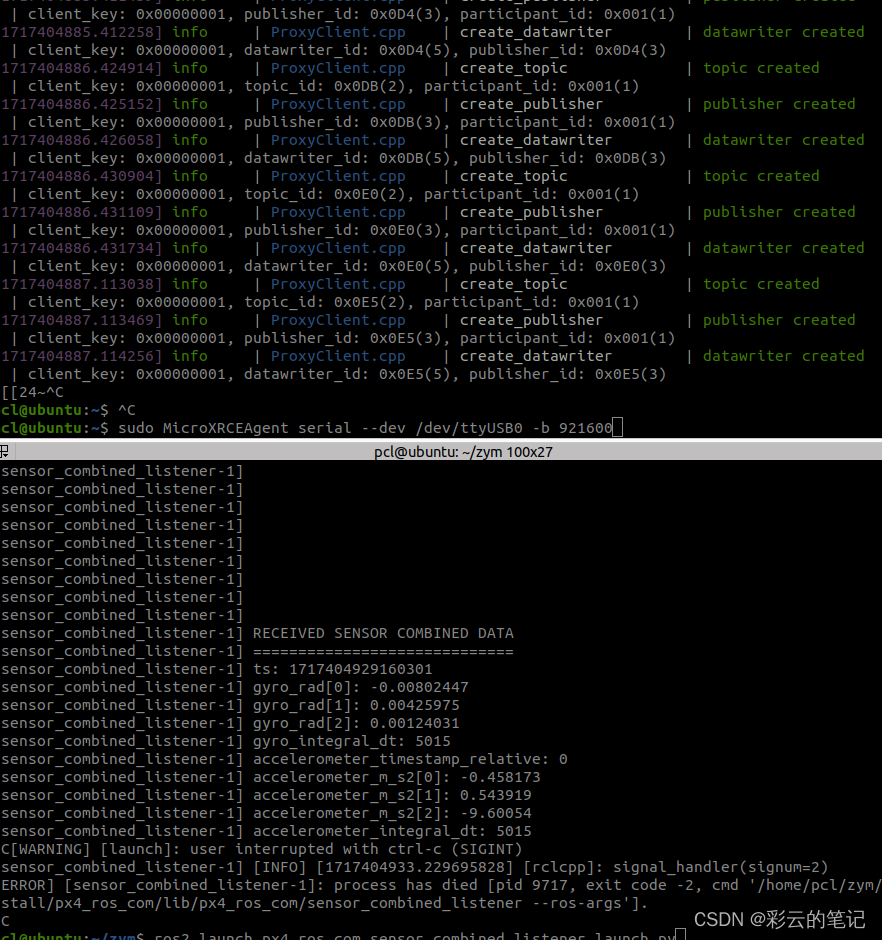
ubuntu22 px4 1.14.3 ros2 humble
硬件接线。 先找两个usb - ttl串口,分别接到两台主机上,保证串口通信正常。
图中是个六合一的。浪费一天时间,发现是串口设置错误ÿ…
【开发环境】PX4无人机实物使用视觉或运动捕捉系统进行位置估计
PX4无人机实物使用视觉或运动捕捉系统进行位置估计 PX4中关于外部位置信息的MAVLink话题参考坐标系EKF2调整配置参数调整EKF2_EV_DELAY参数 与ROS共同使用将OptiTrack MoCap系统提供的姿态数据导入ROSMotive MoCap软件的步骤将姿态数据导入ROS重新映射姿态数据 将姿态数据转发到…

【开发环境-PX4飞控算法】搭建PX4联合Matlab和Simulink进行飞控算法设计的仿真环境
搭建PX4联合Matlab和Simulink进行飞控算法设计的仿真环境 安装UAV Toolbox Support Package for PX4 Autopilots硬件支持包安装WSL2(Windows Subsystem for Linux 2)安装WSL2后Matlab仍卡在配置WSL2页面的解决方法1安装WSL2后Matlab仍卡在配置WSL2页面的…