双目测距的基本原理:
视差(Disparity):Disparity(视差)简单解释_一个勤奋爱写笔记的好菇凉的博客-CSDN博客_disparity
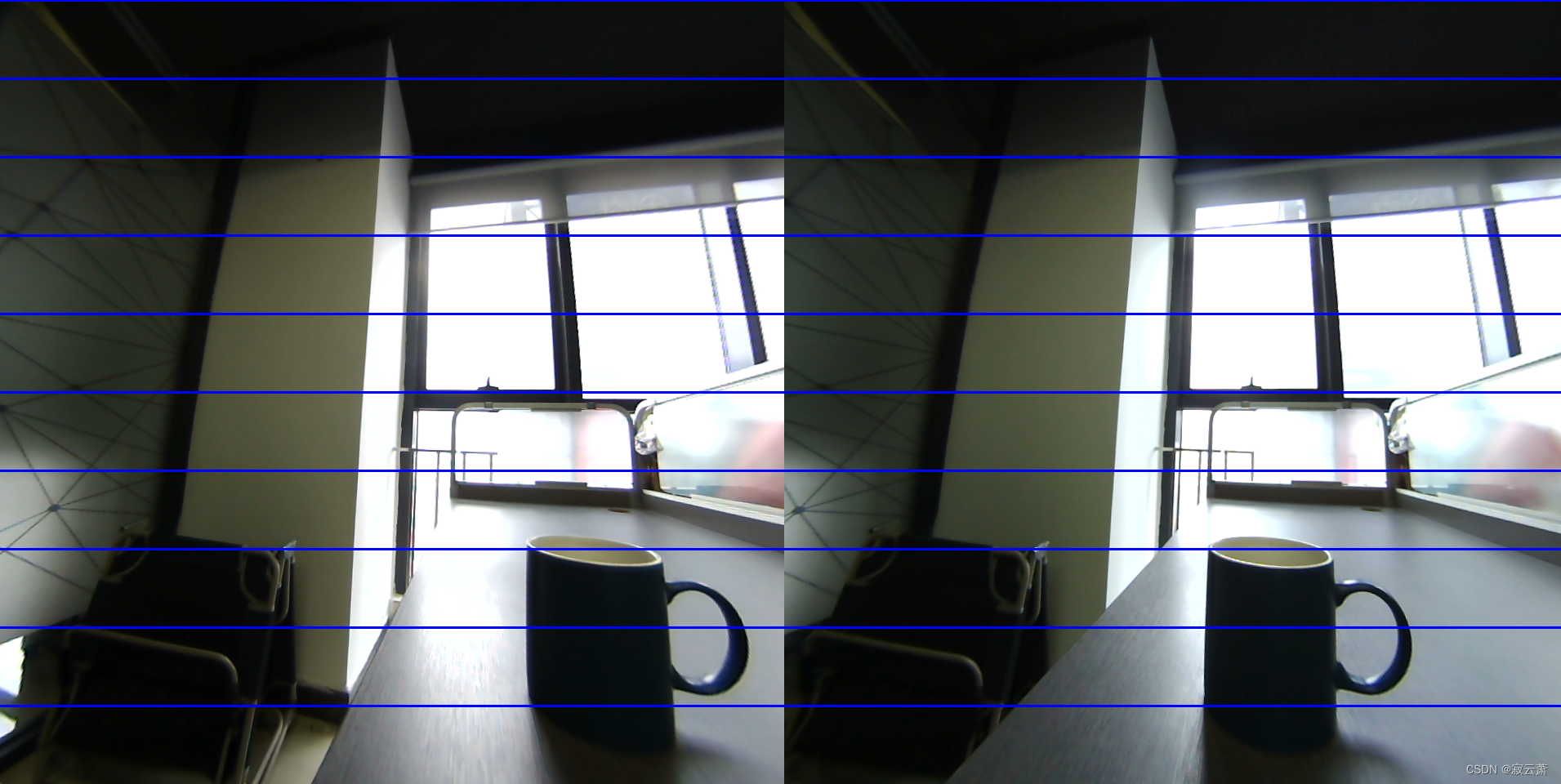
对极几何:对极几何(Epipolar Geometry) - Clarence的笔记 - 博客园
对极几何(Epipolar Geometry) - Clarence的笔记 - 博客园
双目测距的基本原理:
视差(Disparity):Disparity(视差)简单解释_一个勤奋爱写笔记的好菇凉的博客-CSDN博客_disparity
对极几何:对极几何(Epipolar Geometry) - Clarence的笔记 - 博客园
对极几何(Epipolar Geometry) - Clarence的笔记 - 博客园