@
使用激光雷达创建地图
本人小白,把使用激光雷达创建地图的方法写一下,只是一些简单的总结。
安装必要的包、软件
1.最基本的安装ros
2.安装gmapping功能包
3.安装karto功能包
4.安装navigation功能包
5.安装对应的激光雷达驱动功能包
安装完成后直接跑例程都是可以的,但是使用自己的包就是不行,后来回想起来应该是TF问题,于是到处查找TF的设置问题,后来搜索到需要另一个包scan_tools里面的laser_scan_matcher
安装编译过程中缺啥装啥
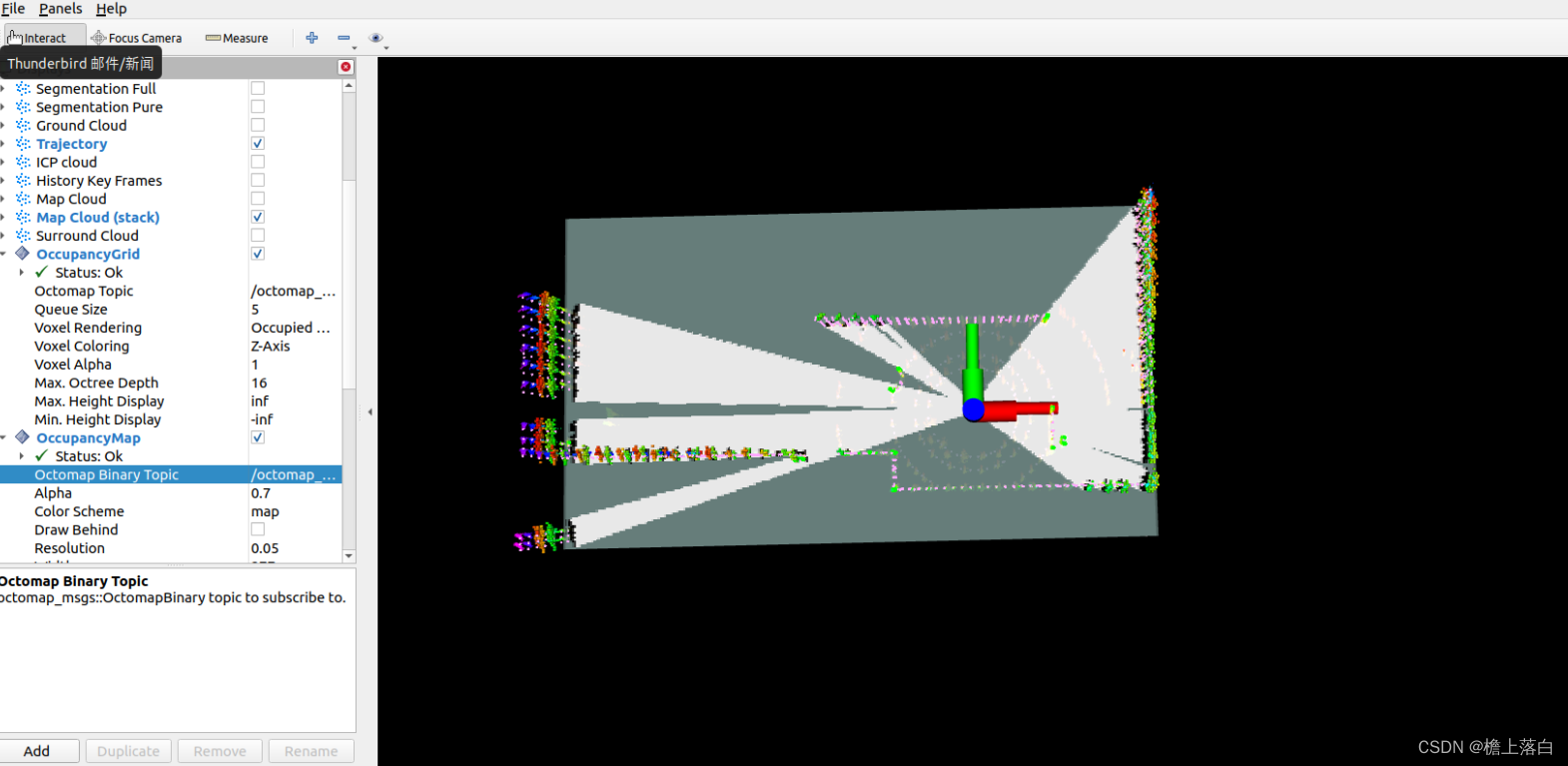
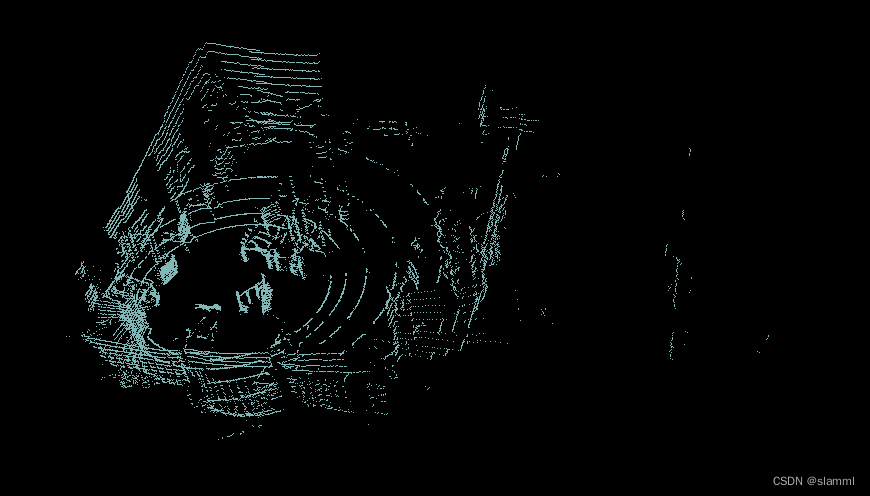
测试
控制自己的机器人,路宝回访放,使用karto或者gmapping都可以建图了。
小技巧:如果bag包里面的数据太多太复杂,可以只播放制定的topic,例如:
rosbag play xxx.bag --clock --topics /scan /odom
后面准备测试navigation,又要和TF纠缠了。



![[激光原理与应用-24]:《激光原理与技术》-10- 激光产生技术-调Q技术、Q开关、Q驱动器](https://img-blog.csdnimg.cn/1d5c7f5ed7574fed95d1b27d3be08f1f.png)