目录
第1章 调Q技术概述
1.1 什么是Q
1.2 什么是调Q技术
1.3 调Q的目的
1.4 调Q的原理
第2章 主要的调Q技术分类
2.2 电光调Q
2.3 被动调Q
第3章 调Q激光器参数对比
3.1 主要的性能参数
3.2 主动调Q激光器的性能参数
3.2 被动调Q激光器
第4章 调Q声光开关
4.1 调Q声光开关组成
4.2 调Q声光开关的工作原理
第5章 调Q声光驱动器
5.1 夏繁QDM系列声光调Q驱动器
第1章 调Q技术概述
1.1 什么是Q
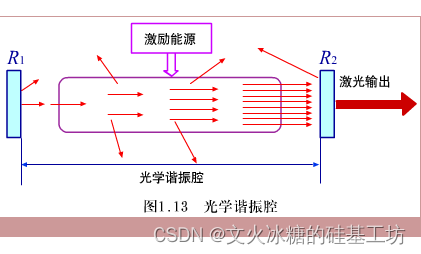
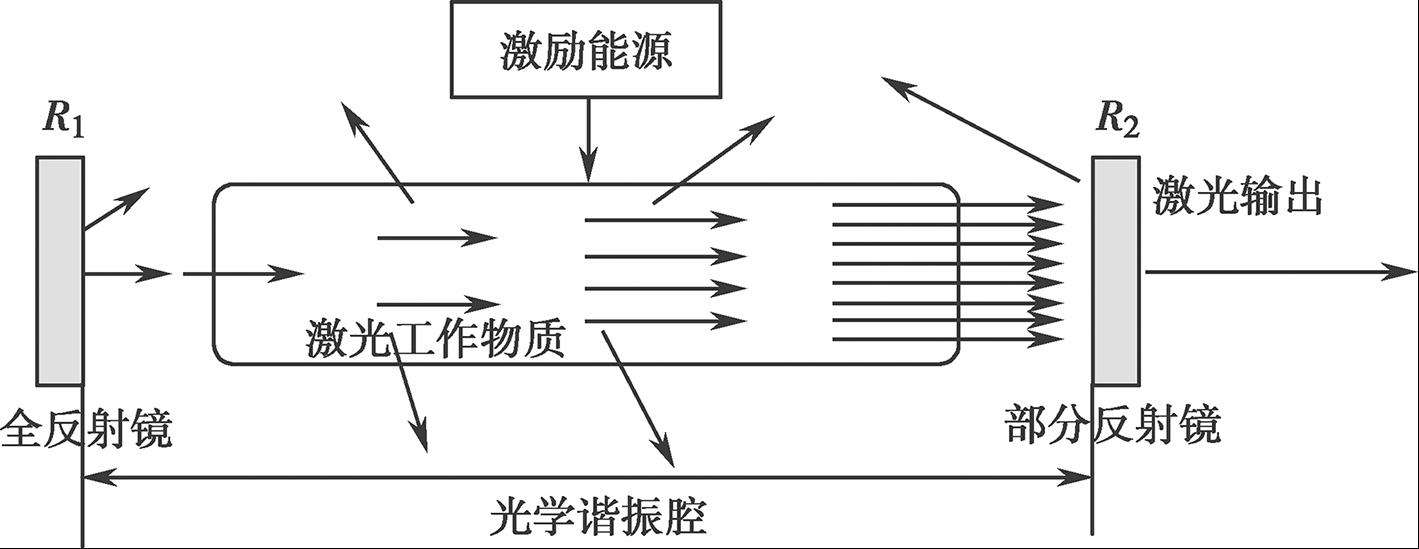
谐振腔的作用是选择频率一定、方向一致的光通过激活介质进行优先放大,从而形成“激光”。
Q值是评定激光器中光学谐振腔质量好坏的指标——“品质因数”。
Q值越低,谐振腔光路的品质越差,谐振腔对光信号的衰减和散射越大,光信号在谐振腔内形成激光震荡的能量就越小。
Q值越高,谐振腔光路的品质越好,谐振腔对光信号的衰减和散射越小,光信号在谐振腔内形成激光震荡的能量就越大。
1.2 什么是调Q技术
调Q技术,就是通过某种手段,来动态、实时调整光学谐振腔的品质因子Q值的技术。
1.3 调Q的目的
通过调Q技术,从而使得激光的连续性输出变成间隙性脉冲输出。
当调低Q值时,就暂时中止了激光能量的输出,工作物质就在激励能源的驱动下,在高能态聚集能量。
当调高Q值时,就突发性的开启激光的发送,从而在高能态被聚集能量就会得到瞬间的释放,从而获得瞬间的、高能量的激光脉冲输出。
调Q技术是一种获得高能量短脉冲的有效方法。
调Q技术也叫Q开关技术,它是将一般输出的连续输出激光压缩到宽度极窄的脉冲中发射,从而使光源的峰值功率提升几个数量级的一种技术。
脉冲的宽度,取决于调高Q值的时长,时长越短,脉冲的宽度越窄。
1.4 调Q的原理
在调Q过程中,增益介质在存储到足够多的能量之前,整个激光器谐振腔保持较高的腔损耗(低品质),此时激光器由于阈值太高,不能产生激光震荡,使得上能级粒子数可以大量积累,当积累到饱和值时,调控腔损耗,使之迅速降低至一个很小的值(高品质),于是在短时间内大部分上能级粒子储存的能量转变为激光能量,在输出端产生一个强的激光脉冲输出。
第2章 主要的调Q技术分类
调Q技术主要分为主动调Q技术和被动调Q技术。
主动调Q技术又分为:
- 电光调Q:主动通过电压的变化来控制增益介质,调制光路的Q值。从而控制输出激光的脉冲。
- 声光调Q:主动通过超声波的变化来控制增益介质,调制光路的Q值,从而控制输出激光的脉冲。
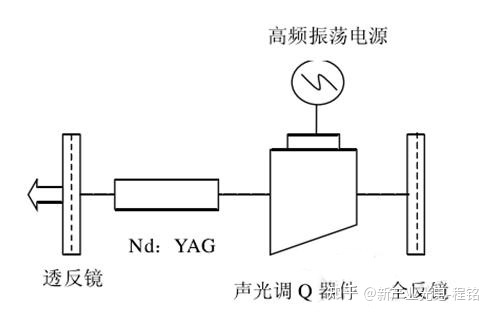
2.1 声光调Q: 电 =》超声波 =》增益介质形变 =》 光信号
声光调Q技术是指在谐振腔中放入声光介质(如AOM晶体):
(1)低Q值:高损耗
当有超声波时,声光介质密度发生周期变化,导致折射率周期变化,使光束发生偏转,这时谐振腔的Q值很低(高损耗),使上能级粒子数迅速积累。
(2)高Q值:低损耗
当没有超声波存在时,光束可自由通过声光介质,腔的Q值很高(低损耗),容易产生激光振荡。
因此,我们可通过控制超声波来达到控制腔内损耗的效果,继而得到脉冲激光输出。
备注:
超声波是有由电产生的,电声设备产生超声波,超声波控制介质损耗,从而控制光信号。
2.2 电光调Q
电光调Q则是利用晶体的电光效应,在晶体上加一阶跃式电压,调节腔内光子的反射损耗。

直接在晶体上施加高压:
(1)低Q值:高损耗
此时,电光Q开关处于关闭状态,谐振腔处于低Q状态,系统处于储能状态,此时没有激光脉冲。
(2)高Q值:低损耗
当谐振腔内的反转粒子数达到最大值时,突然撤去晶体上的高压,谐振腔处于高Q状态,形成脉冲激光输出。
备注:
这种方法,直接通过电信号控制光信号的输出。
缺点:需要较高的电压,有时候甚至高达上百伏。
2.3 被动调Q
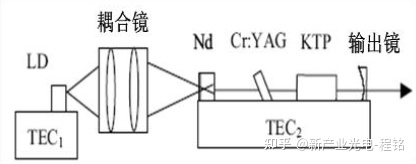
被动调 Q 技术是在激光器谐振腔内设置可饱和吸收体(常用固体可饱和吸收体,如Gr:YAG),利用其饱和吸收效应的周期性,来周期性地控制谐振腔损耗来获得脉冲光输出。
(1)低Q值:高损耗
开始阶段,腔内自发荧光很弱,可饱和吸收体的吸收系数很大,光的透过率很低,腔处于高损耗的状态故不能形成激光振荡。
(2)高Q值:低损耗
随光泵的继续作用,反转粒子数不断积累,腔内荧光不断变强,当光强达到一定数值时,可饱和吸收体吸收达到饱和值突然被“漂白”而输出激光脉冲。
(3)周期性
而后,腔内光场减弱,可饱和吸收体恢复吸收特性,然后再重复以上过程以此得到脉冲光输出。
第3章 调Q激光器参数对比
3.1 主要的性能参数
(1)平均功率
平均功率 = 单脉冲能量×重复频率——在一个重复周期,单位时间所输出的激光能量。
(2)峰值功率
峰值功率 =单脉冲能量/脉冲宽度——单个脉冲达到的最高功率。
(3)脉冲宽度
脉冲宽度:单个脉冲作用时间。
光子数从半极大值上升到峰值所需的时间与光子数从峰值下降到半极大值处所需的时间之和。
有毫秒(ms)、微秒(us)、纳秒(ns)、皮秒(ps)、飞秒(fs)等各种量级。
量级越小,激光作用持续时间越短。
在单脉冲能量相同的情况下:脉宽越窄、峰值功率越高,脉宽越长、峰值功率越低。
(4)重复频率
重复频率:在单位时间内,有规律地输出激光的脉冲数目(等同于一秒内脉冲重复出现的次数)。在平均功率相同的情况下:重频越低、单脉冲能量越高;重频越高、单脉冲能量越低。

3.2 主动调Q激光器的性能参数
主动调Q(声光调Q和电光调Q)激光器
- Q开关需要外部驱动装置:先把电信号转换成超声波信号
- Q开关开启的延迟时间是可控的
- 输出脉冲频率可调
(1)声光调Q的性能

此方式可获得高重频激光运转,但是其开关速度较慢,获得的激光脉冲宽度相对较宽。
(2)电光调 Q 的性能:

此方式开关速度快、关断能力强,LD 泵浦的全固态激光器,结合电光调 Q 方式可获得高重频、窄脉宽、高峰值功率激光输出。
3.2 被动调Q激光器

被动调 Q 方式,由于不需要附加的偏振光学元件或外部驱动装置,
- 更易于获得窄脉宽激光输出,频率固定不变。
- 被动调Q激光器体积一般较小,结构简单紧凑。
第4章 调Q声光开关
4.1 调Q声光开关组成
充当声光开关功能的器件通常是晶体,如AOM晶体。
Q开关元件主要由石英晶体,压电换能器,阻抗匹配元件,射频插头和壳体组成。
(1)射频插头:接收外部的射频电信号。
(2)压电换能器:把射频电信号转换成超声波信号
(3)阻抗匹配元件:确保输入的射频信号不会因为反射的射频信号相互干涉、消减。
(4)吸声材料 = 石英晶体:对光进行折射和穿透,能够吸收超声波信号,石英晶体的折射率受到超声波的压力作用,会发生临时性的改变。
(5)壳体:保护
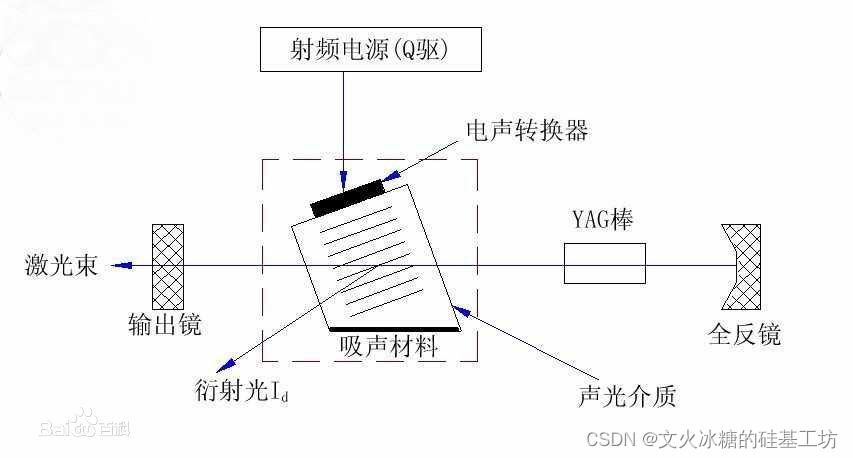
4.2 调Q声光开关的工作原理
Q开关是激光光学系统中一个重要光学元件,它通过阻断和不阻断光的反射通道来抑制和产生激光脉冲。
不给压电换能器施加射频信号时,石英晶体保持其原有的常规折射率,由激光棒发射出来的平行光透过石英晶体,经后反光镜发射再穿过石英晶体,返回激光棒,形成震荡。
一旦给压电换能器施加射频信号,压电换能器立即在石英体内。压迫石英晶体使它的折射率发生变化,透过石英晶体的光线发生折射而偏离后反光镜,使得没有光线返回激光棒。
由于激光光线返回激光棒,形成反复震荡是激发激光的必要条件,所以产生激光的进程停止,因此给压电换能器施加和撤除射频信号,是关掉和释放激光的重要控制手段。
第5章 调Q声光驱动器
5.1 夏繁QDM系列声光调Q驱动器

QDM 系列 Q 驱动器为全新设计,完全自主创新的产品,和其他产品相比,突出可靠性和性价比。QDM 系列 Q 驱动器是一款中低功率的射频发生器,可以用来驱动短脉冲激光器相关 AOM 开关,当然也可以用于其他射频领域。QDM 系列结构紧凑,射频输出稳定,抗干扰能力强,可靠性高,是声光开关的理想驱动源。
(1)输出射频信号:输出频率,单位 MHz
- RF 输出端子
可选值:
- 40.68MHz
- 68MHz
- 80MHz
(2)输入控制信号
- VDD:12V或15V电压
- GND:地
- Enable:使能射频输出,高电平使能有效;低电平时,RF无射频输出。
- MIA(Mod In Analog):0-5V模拟电压,用于控制射频信号的幅度,从而控制激光信号的输出功率。
- MIV(Mod In Variable):数字开关信号,用于控制射频信号的输出。连接到激光器的外部接口信号:Gate门控信号。
- Switch1:用于配置MIV的极性,是1正电平控制,还是0低电平控制。
-- on(默认):MIV为低电平时,有射频信号输出;MIV高电平,无射频信号输出。
--off(非默认):MIV为高电平时,有射频信号输出;MIV低电平,无射频信号输出。
(3)性能参数表

(1)RF输出功率是指:输入模拟信号为5V时,RF最大的输出功率。在RF频率固定的情况下,RF的功率取决于RF信号的幅度。
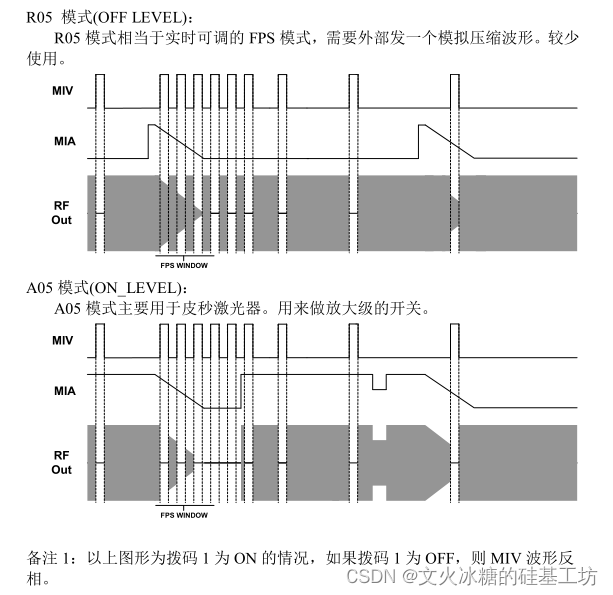
(2)FPS(First Pulse Suppression))模式:首脉冲抑制模式。