我们ES集群主要解决的是这两个问题:海量数据存储问题、单点故障问题
海量数据存储问题:单机的ES,数据存储能力是有上限的
单点故障问题:如果单机上的Elasticsearch节点发生故障,整个系统会停止服务,导致数据不可访问甚至丢失,造成损失
单机的elasticsearch做数据存储,必然面临两个问题:海量数据存储问题、单点故障问题。
·海量数据存储问题:将索引库从逻辑上拆分为N个分片(shard),每一份叫做一个分片,存储到多个节点,多台机器上,这样我的存储能力是多个节点存储能力总和,机器越多,理论存储的上限就可以越高,存储能力就得到提升了:
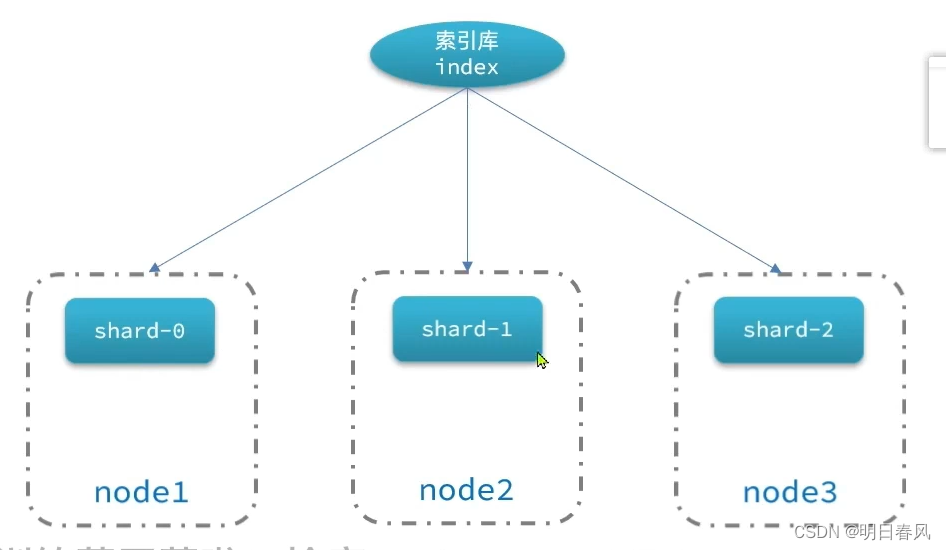
单点故障问题:将分片数据做一个备份,并且一个分片的主分片和副分片绝对不能放在同一个节点,避免这个节点挂了,什么都没有了 ,这样可以在一定的程度上解决单点故障问题,当然成本也越高。
部署es集群
docker-compose:在一个文本文件里描述多个容器的部署方式,从而实现一键部署,描述了三个es节点容器的部署方案;
部署es集群可以直接使用docker-compose来完成,不过要求你的Linux虚拟机至少有4G的内存空间,我们现在利用三个docker容器模拟3个ed节点(3个机器),容器之间相互隔离:
version: '2.2'
services:es01:image: docker.elastic.co/elasticsearch/elasticsearch:7.17.5container_name: es01environment:- node.name=es01- cluster.name=es-docker-cluster- discovery.seed_hosts=es02,es03- cluster.initial_master_nodes=es01,es02,es03- bootstrap.memory_lock=true- "ES_JAVA_OPTS=-Xms512m -Xmx512m"ulimits:memlock:soft: -1hard: -1volumes:- data01:/usr/share/elasticsearch/dataports:- 9200:9200networks:- elastices02:image: docker.elastic.co/elasticsearch/elasticsearch:7.17.5container_name: es02environment:- node.name=es02- cluster.name=es-docker-cluster- discovery.seed_hosts=es01,es03- cluster.initial_master_nodes=es01,es02,es03- bootstrap.memory_lock=true- "ES_JAVA_OPTS=-Xms512m -Xmx512m"ulimits:memlock:soft: -1hard: -1volumes:- data02:/usr/share/elasticsearch/datanetworks:- elastices03:image: docker.elastic.co/elasticsearch/elasticsearch:7.17.5container_name: es03environment:- node.name=es03- cluster.name=es-docker-cluster- discovery.seed_hosts=es01,es02- cluster.initial_master_nodes=es01,es02,es03- bootstrap.memory_lock=true- "ES_JAVA_OPTS=-Xms512m -Xmx512m"ulimits:memlock:soft: -1hard: -1volumes:- data03:/usr/share/elasticsearch/datanetworks:- elasticvolumes:data01:driver: localdata02:driver: localdata03:driver: localnetworks:elastic:driver: bridge
在这个compose的文件里,其实就是描述了我们要部署的三个es节点的部署方案,es01、es02、es03的写法基本上一致的:
- Image镜像:每一个容器都采用的都是elasticSearch7.12.1。
- container_name容器的名称
- Environment:环境变量
- node.name节点名称,在elasticSearch里边,每个节点都要有自己的名字,不能重复。
- Cluster.name集群名称,这个就很重要了,elasticSearch天生是支持集群的,你启动多台机器以后,只需要让他们的集群名称一样就可以了。因为集群名称一样,es就会自动把它们组装成一个集群,非常的方便。
- Discovery.seed_hosts其实就是集群中的另外两个节点的ip地址,那这里我为什么没有写i p地址呢?是因为docker容器内可以直接用容器名互联
- initial_master_nodes:初始化的主节点/配置候选主节点,既然是集群,一定有主从之分
- ES_JAVA_OPTS:配置JVM堆内存大小,最小内存和最大内存都配成了512M
- Volumes:数据卷
- Port端口映射:注意一下三个节点容器外的端口不能一致
第一步:
vi /etc/sysctl.conf
第二步:
vm.max_map_count = 262144
第三步: 让配置生效
sysctl -p [root@db301601 ~]# docker restart es
es
[root@db301601 ~]# docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
877298bbcfdf elasticsearch:7.12.1 "/bin/tini -- /usr/l…" 22 minutes ago Up 23 seconds 0.0.0.0:9200->9200/tcp, :::9200->9200/tcp, 0.0.0.0:9300->9300/tcp, :::9300->9300/tcp es
881f28a337e6 kibana:7.12.1 "/bin/tini -- /usr/l…" 2 hours ago Up 2 hours 0.0.0.0:5601->5601/tcp, :::5601->5601/tcp kibana
[root@db301601 ~]# vi /etc/sysctl.conf
[root@db301601 ~]# sysctl -p
vm.swappiness = 0
kernel.sysrq = 1
net.ipv4.neigh.default.gc_stale_time = 120
net.ipv4.conf.all.rp_filter = 0
net.ipv4.conf.default.rp_filter = 0
net.ipv4.conf.default.arp_announce = 2
net.ipv4.conf.lo.arp_announce = 2
net.ipv4.conf.all.arp_announce = 2
net.ipv4.tcp_max_tw_buckets = 5000
net.ipv4.tcp_syncookies = 1
net.ipv4.tcp_max_syn_backlog = 1024
net.ipv4.tcp_synack_retries = 2
net.ipv4.tcp_slow_start_after_idle = 0
vm.max_map_count = 262144
[root@db301601 ~]# 第四步:运行
如果报错请看这篇博客: docker-compose: command not found-CSDN博客
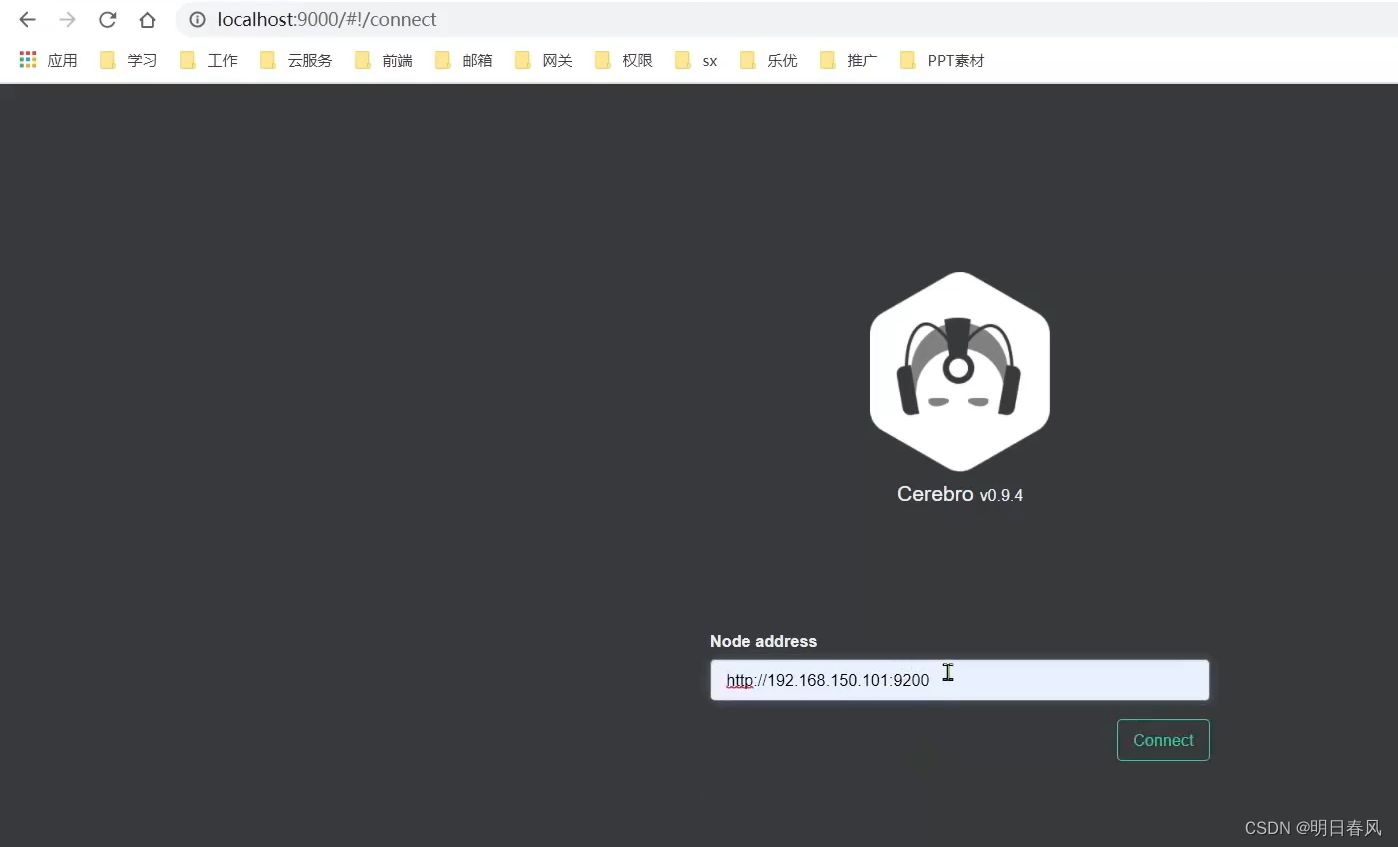
docker-compose up -d我们可以用kibana去监控集群的状态,但是kibana默认只能连接到其中的一个节点,并且还依赖x-pack,所以采用cerebro:
然后你输入节点的地址,就可以访问虚拟机上任意节点的地址了:
集群下的数据查询、存储是什么样子的呢