混淆矩阵
| 真实值=正例 | 真实值=负例 | |
| 预测值=正例 | TP | FP |
| 预测值=负例 | FN | TN |
(根据阈值预测)
P精确度计算:TP/(TP+FP)
R召回率计算:TP/(TP+FN)
AP
综合考虑P R
根据不同的阈值计算出不同的PR组合, 画出PR曲线,计算曲线下面积即为PR
(所有点插值法计算,简单来讲就是近似计算小矩形面积和)
import numpy as np
import matplotlib.pyplot as pltdef calculate_precision_recall(confusion_matrices):#计算P Rrecall = []precision = []for tp, fp, fn in confusion_matrices:if tp + fp == 0:p = 0.0else:p = tp / (tp + fp)if tp + fn == 0:r = 0.0else:r = tp / (tp + fn)precision.append(p)recall.append(r)return recall, precisiondef calculate_ap_all_points(recall, precision):#所有点插值法计算面积recall = np.concatenate(([0.], recall, [1.]))precision = np.concatenate(([0.], precision, [0.]))for i in range(precision.size - 1, 0, -1):precision[i - 1] = np.maximum(precision[i - 1], precision[i])ap = np.sum(np.diff(recall) * precision[1:])return ap# 示例 (每个元素为 [TP, FP, FN])
confusion_matrices = [[10, 0, 0], # 置信度阈值1[8, 1, 2], # 置信度阈值2[6, 2, 4], # 置信度阈值3[5, 3, 5], # 置信度阈值4[4, 4, 6], # 置信度阈值5[3, 7, 7], # 置信度阈值6
]# 计算精确率和召回率
recall, precision = calculate_precision_recall(confusion_matrices)# 计算AP
ap = calculate_ap_all_points(recall, precision)
print(f"平均精度 (AP): {ap}")# 绘制精确率-召回率曲线
plt.plot(recall, precision, marker='o')
plt.xlabel('Recall')
plt.ylabel('Precision')
plt.title('Precision-Recall Curve (AP = {:.3f})'.format(ap))
plt.grid(True)
plt.show()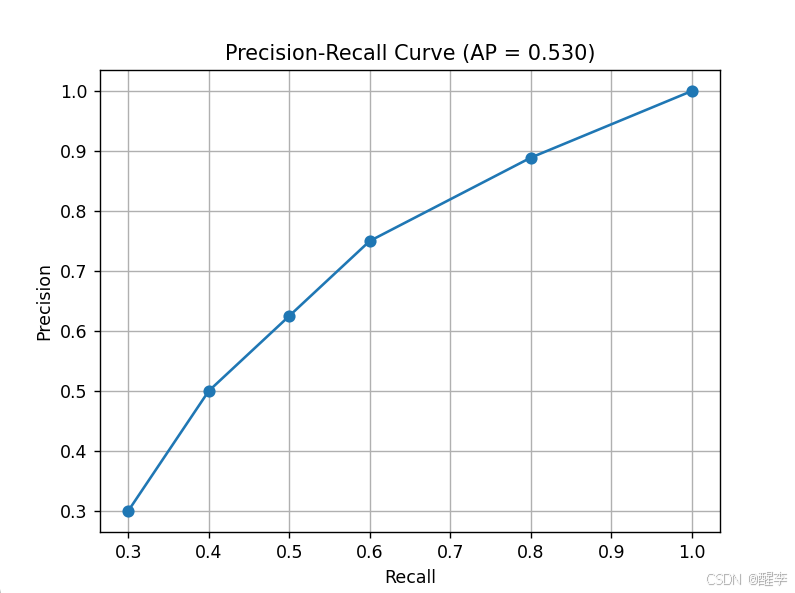
AR
平均召回率
主要是考虑漏检,专注于R
import numpy as npdef calculate_ar(true_positives, false_negatives, max_detections):recall_values = []for tp, fn in zip(true_positives, false_negatives):if tp + fn == 0:recall = 0.0else:recall = tp / (tp + fn)recall_values.append(recall)# 假设我们只考虑前 max_detections 个召回率值if len(recall_values) > max_detections:recall_values = recall_values[:max_detections]if not recall_values:return 0.0ar = np.mean(recall_values)return ar# 示例数据
true_positives = [10, 8, 6, 5, 4, 3] # TP
false_negatives = [0, 2, 4, 5, 6, 7] # FP
max_detections = 5 # 最大检测次数# 计算AR
ar = calculate_ar(true_positives, false_negatives, max_detections)
print(f"平均召回率 (AR): {ar}")#计算maxDets 为10时候的AR
max_detections_2 = 10
ar_2 = calculate_ar(true_positives, false_negatives, max_detections_2)
print(f"平均召回率 (AR)maxDets为10 : {ar_2}")平均精度(Average Precision,AP)以及AP50、AP75、APs、APm、APl、Box AP、Mask AP等不同阈值和细分类别的评估指标说明-CSDN博客


