随着无人机技术的迅速发展及其在军事领域的广泛应用,精准目标检测逐渐成为现代战场中提升打击效能和战术决策的关键技术之一。无人机因其灵活性、机动性和高效性,已经成为现代战争中不可或缺的侦察与打击工具。在复杂多变的战场环境中,及时、准确地识别关键目标,尤其是敌方作战人员、装甲车辆和重要军事设施,能够显著提高战场决策的精确性与打击的有效性。然而,传统的图像识别与目标检测手段在面对动态、多变且复杂的战场场景时,往往存在实时性不足、准确率较低等问题,难以满足现代军事打击的高要求。
为了解决上述问题,本文提出了一种基于YOLOV8深度学习模型的无人机视角军事打击目标检测系统。YOLOV8作为目标检测领域的最新发展,具备较强的实时性与精确性,能够快速识别多类目标。本文系统结合了YOLOV8的先进技术,通过实时处理无人机拍摄的高空战场图像,自动检测并精准定位多个类型的军事目标,如“作战人员”、“装甲车”、“军用车辆”、“房屋工事”和“坦克”等。这些目标在现代战争中至关重要,能够直接影响战场态势及作战效果,因此,及时、准确地检测这些目标对作战成功至关重要。
本系统的开发与实现涵盖了多个核心模块:首先,系统基于大量军事目标数据集进行训练,确保模型能够识别复杂环境下的多种军事目标。其次,利用PyQt5框架开发了直观且功能丰富的用户界面,方便操作人员在战场环境中快速部署和使用该系统。该界面设计简洁明了,操作便捷,用户可以通过界面实时监控无人机拍摄的图像,并查看检测到的目标信息。此外,系统还集成了模型训练代码,使其具备自主更新和学习能力,能够适应不断变化的战场环境和新出现的目标类型。
实验结果显示,系统在各种复杂环境下均表现出较高的检测精度和稳定的实时性,尤其在多目标检测、动态目标跟踪以及对环境干扰具有较强的鲁棒性。在测试过程中,无论是复杂的战场场景,还是恶劣的天气条件,系统都能够迅速识别并精确定位多个军事目标,为指挥人员提供了及时、可靠的战术信息支持。与传统的目标检测方法相比,基于YOLOV8的系统不仅检测速度更快,且检测精度显著提升,能够有效降低误报率和漏报率。
本文的研究与实现对无人机在智能化军事应用中的发展具有重要的参考价值。在未来战争中,智能无人机将越来越多地承担起侦察、打击等重要任务,而精准目标检测则是无人机打击效能的核心。通过不断优化检测算法,提升系统的适应性与智能化水平,未来的无人机军事打击系统将能够更加自主、精确地完成复杂战场任务,极大提升作战效能。本文的研究不仅为现有的无人机技术应用提供了实践经验,也为未来无人机与人工智能技术的结合指明了发展方向。
基于YOLOV8深度学习的无人机视角军事打击目标检测系统具有广泛的应用前景和显著的实际意义。随着系统的进一步优化和完善,该系统有望在未来的军事行动中发挥更加重要的作用,成为现代战争中提升作战效能的核心技术之一。
算法流程

项目数据
通过搜集关于数据集为各种各样的军事打击目标相关图像,并使用Labelimg标注工具对每张图片进行标注,分5检测类别,分别是’作战人员’,’装甲车’,’军用车辆’,’房屋工事’,’坦克’。
目标检测标注工具
(1)labelimg:开源的图像标注工具,标签可用于分类和目标检测,它是用python写的,并使用Qt作为其图形界面,简单好用(虽然是英文版的)。其注释以 PASCAL VOC格式保存为XML文件,这是ImageNet使用的格式。此外,它还支持 COCO数据集格式。
(2)安装labelimg 在cmd输入以下命令 pip install labelimg -i https://pypi.tuna.tsinghua.edu.cn/simple
![]()
结束后,在cmd中输入labelimg
![]()
初识labelimg
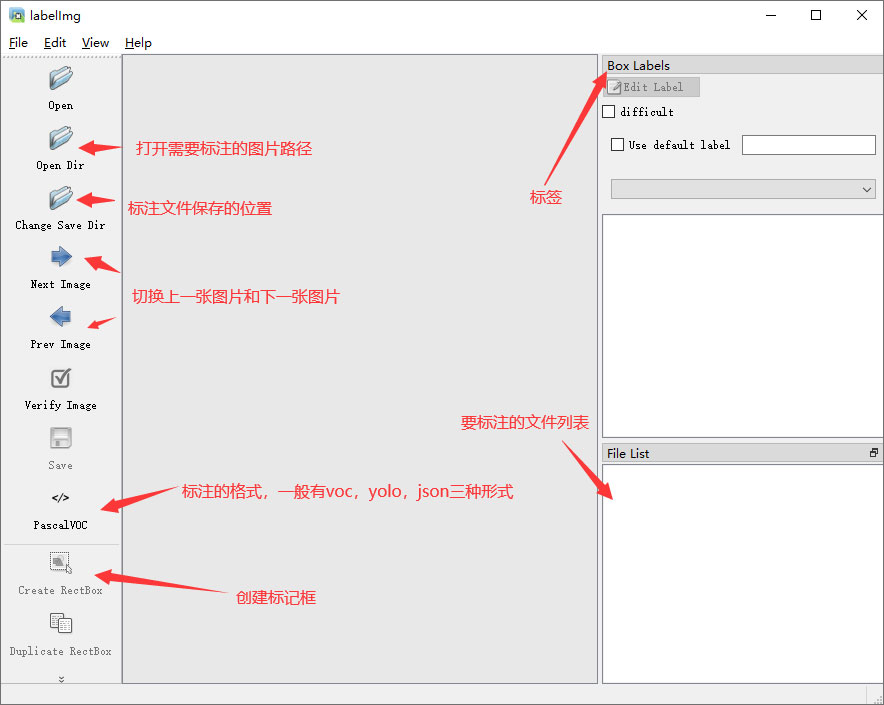
打开后,我们自己设置一下
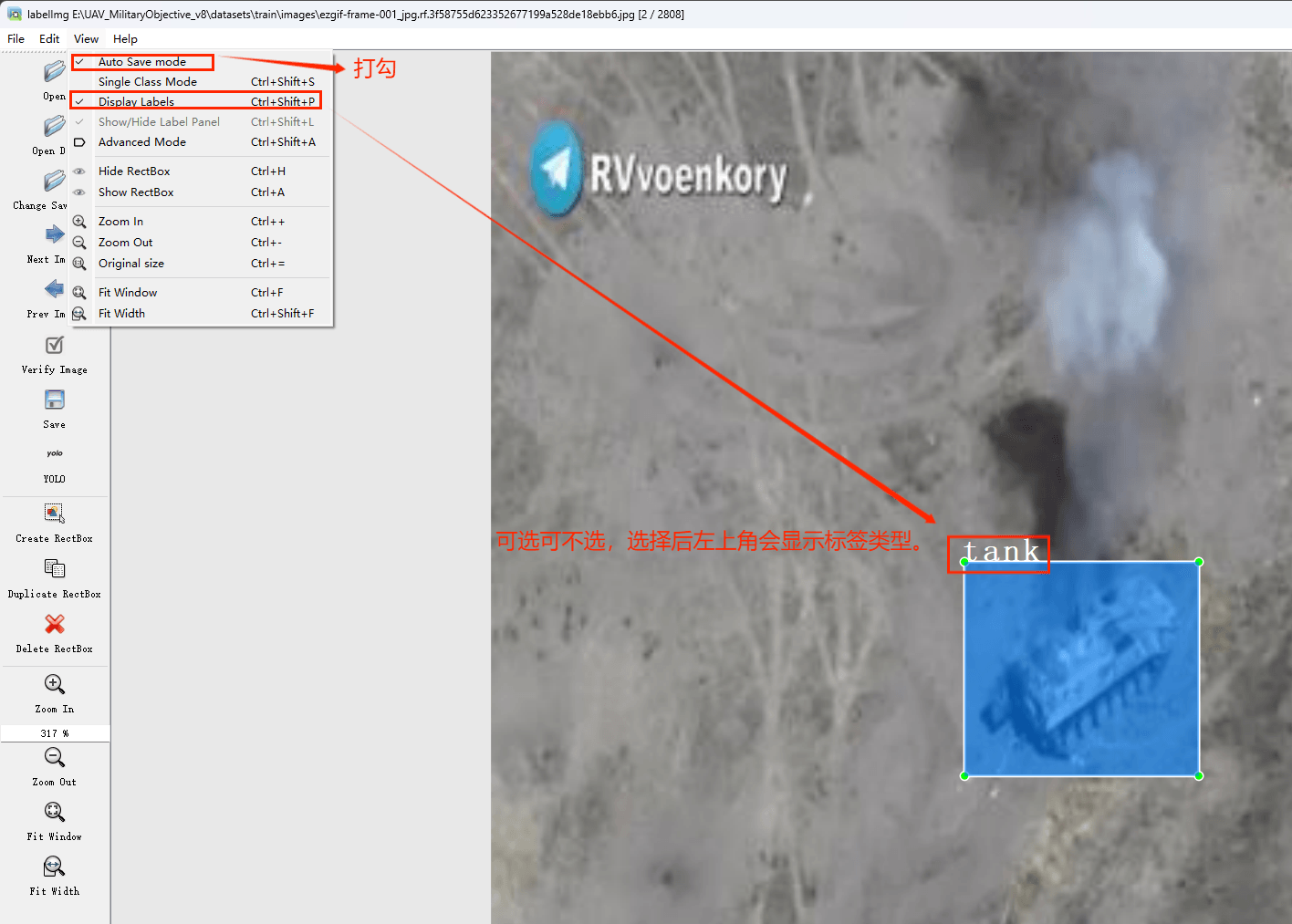
在View中勾选Auto Save mode
接下来我们打开需要标注的图片文件夹
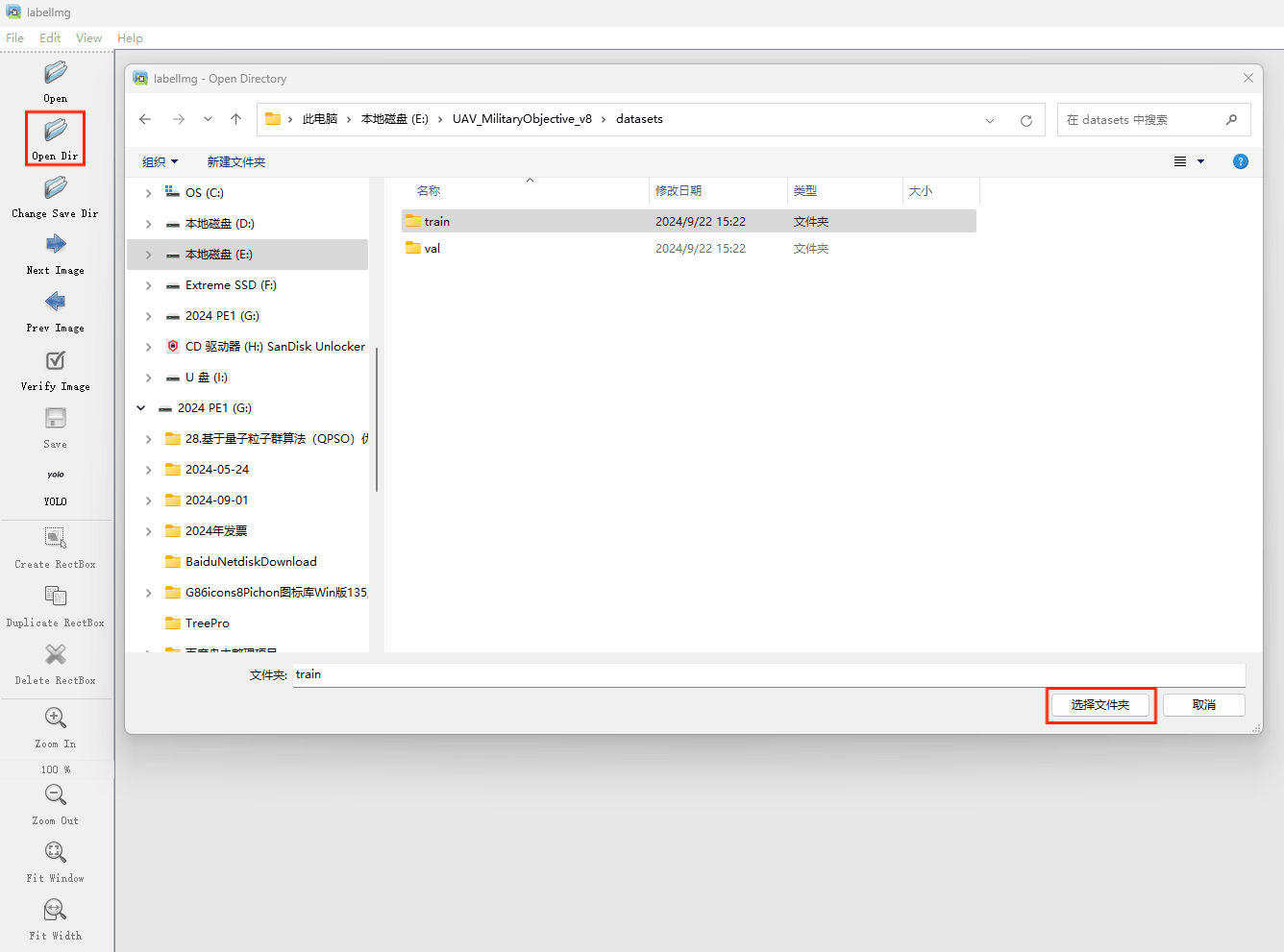
并设置标注文件保存的目录(上图中的Change Save Dir)
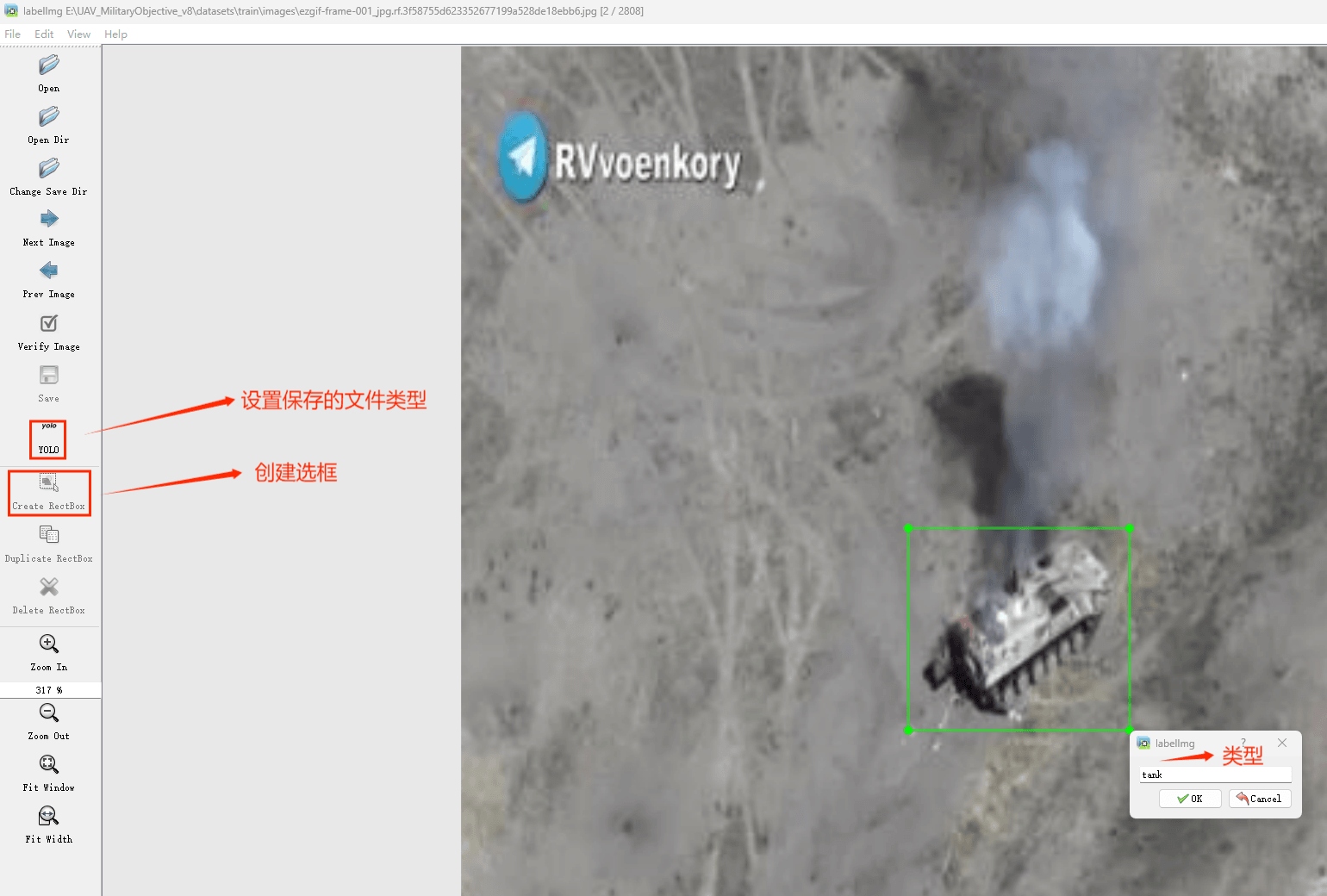
接下来就开始标注,画框,标记目标的label,然后d切换到下一张继续标注,不断重复重复。
Labelimg的快捷键

(3)数据准备
这里建议新建一个名为data的文件夹(这个是约定俗成,不这么做也行),里面创建一个名为images的文件夹存放我们需要打标签的图片文件;再创建一个名为labels存放标注的标签文件;最后创建一个名为 classes.txt 的txt文件来存放所要标注的类别名称。
data的目录结构如下:
│─img_data
│─images 存放需要打标签的图片文件
│─labels 存放标注的标签文件
└ classes.txt 定义自己要标注的所有类别(这个文件可有可无,但是在我们定义类别比较多的时候,最好有这个创建一个这样的txt文件来存放类别)
首先在images这个文件夹放置待标注的图片。
生成文件如下:
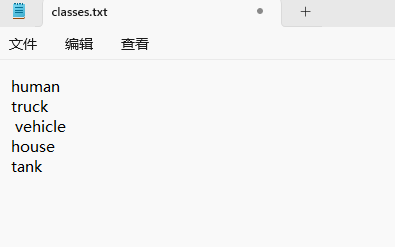
“classes.txt”定义了你的 YOLO 标签所引用的类名列表。
(4)YOLO模式创建标签的样式
存放标签信息的文件的文件名为与图片名相同,内容由N行5列数据组成。
每一行代表标注的一个目标,通常包括五个数据,从左到右依次为:类别id、x_center、y_center、width、height。
其中:
–x类别id代表标注目标的类别;
–x_center和y_center代表标注框的相对中心坐标;
–xwidth和height代表标注框的相对宽和高。
注意:这里的中心点坐标、宽和高都是相对数据!!!

存放标签类别的文件的文件名为classes.txt (固定不变),用于存放创建的标签类别。
完成后可进行后续的yolo训练方面的操作。
模型训练
模型的训练、评估与推理
1.YOLOv8的基本原理
YOLOv8是一个SOTA模型,它建立在Yolo系列历史版本的基础上,并引入了新的功能和改进点,以进一步提升性能和灵活性,使其成为实现目标检测、图像分割、姿态估计等任务的最佳选择。其具体创新点包括一个新的骨干网络、一个新的Ancher-Free检测头和一个新的损失函数,可在CPU到GPU的多种硬件平台上运行。
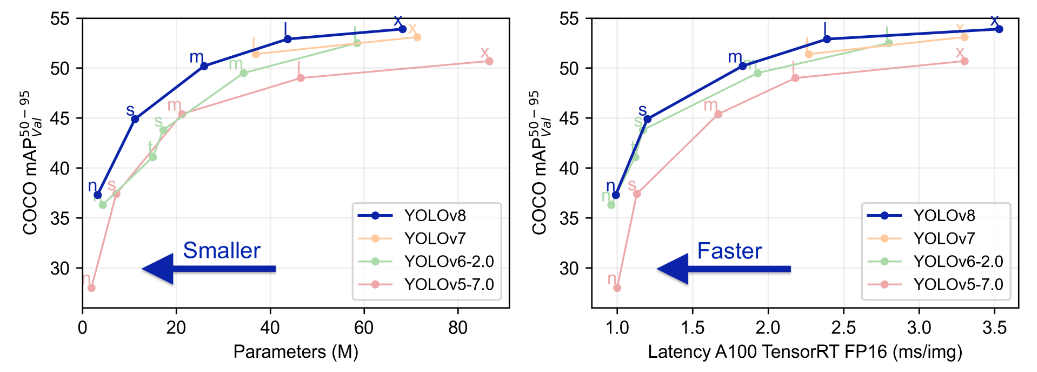
YOLOv8是Yolo系列模型的最新王者,各种指标全面超越现有对象检测与实例分割模型,借鉴了Yolov5、Yolov6、YoloX等模型的设计优点,在全面提升改进Yolov5模型结构的基础上实现,同时保持了Yolov5工程化简洁易用的优势。
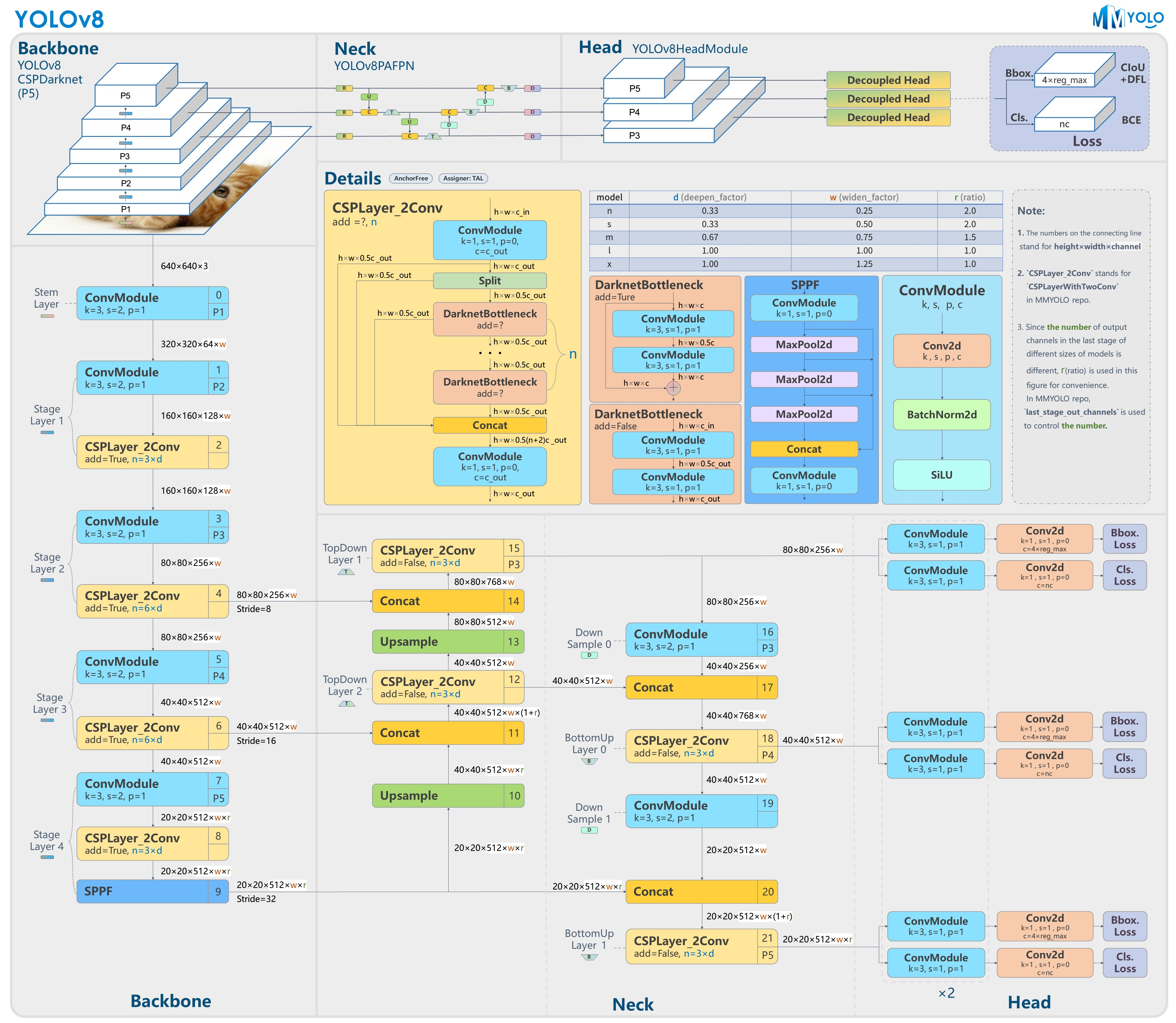
Yolov8模型网络结构图如下图所示:
2.数据集准备与训练
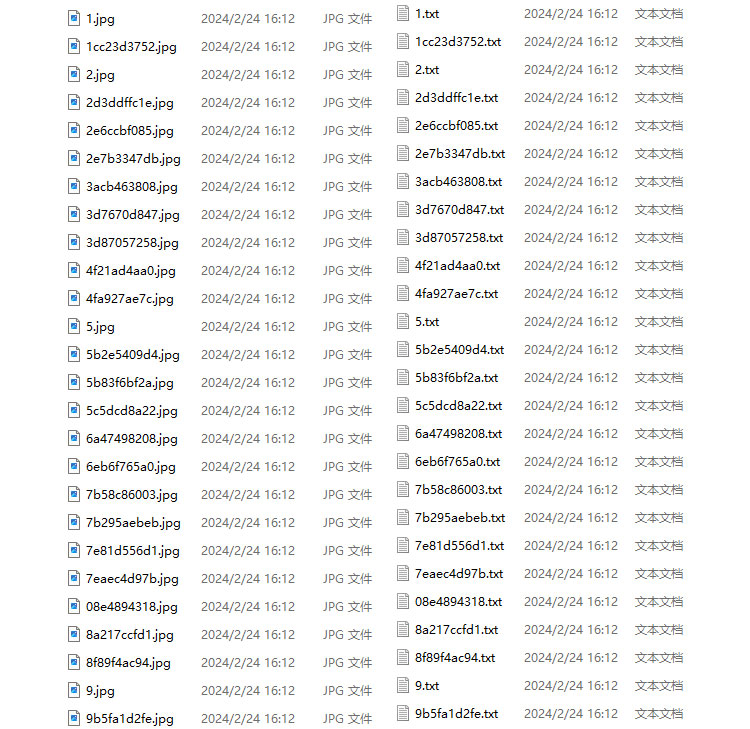
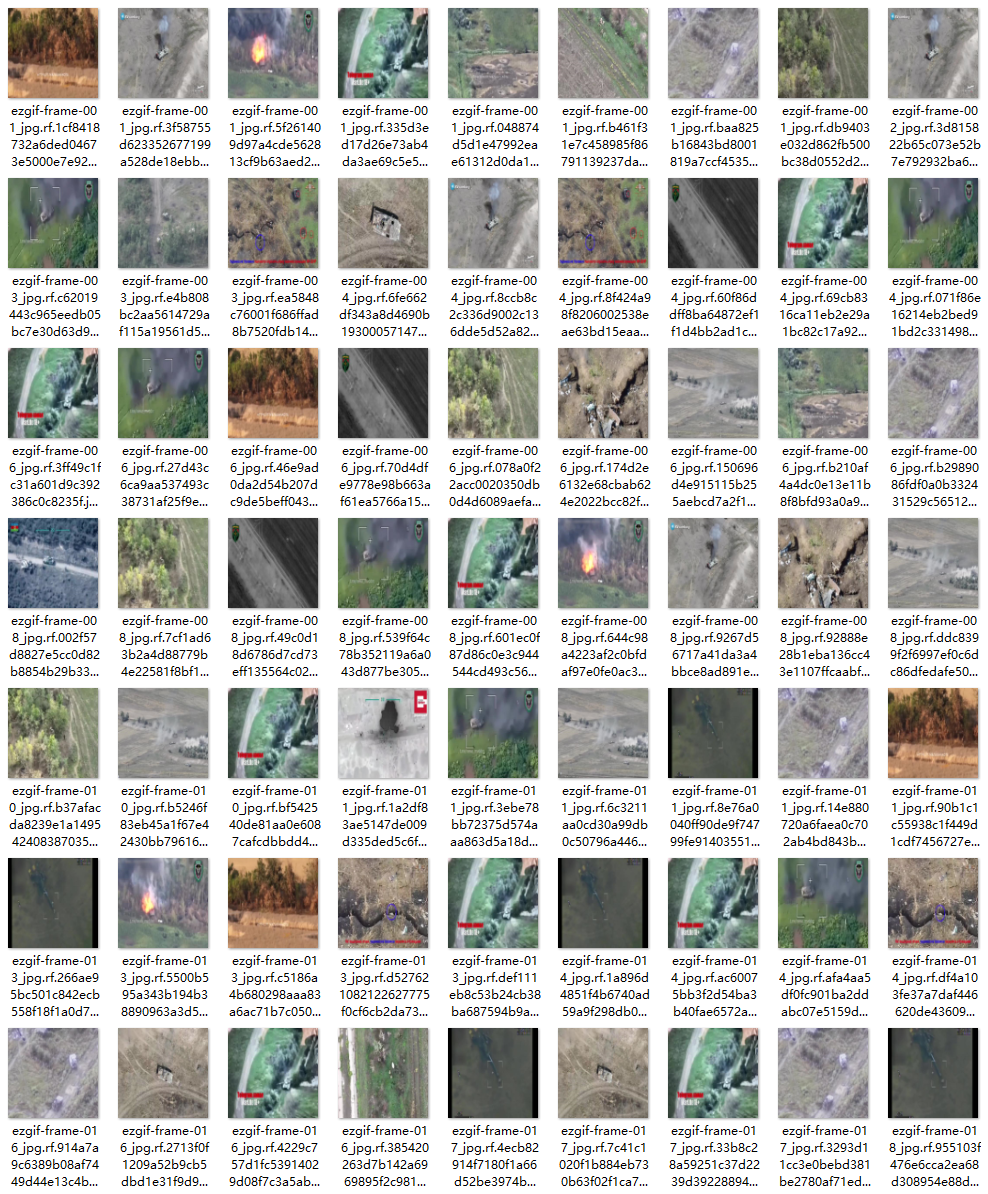
本研究使用了包含各种军事打击目标相关图像的数据集,并通过Labelimg标注工具对每张图像中的目标边框(Bounding Box)及其类别进行标注。然后主要基于YOLOv8n这种模型进行模型的训练,训练完成后对模型在验证集上的表现进行全面的性能评估及对比分析。模型训练和评估流程基本一致,包括:数据集准备、模型训练、模型评估。本次标注的目标类别为军事打击目标,数据集中共计包含3555张图像,其中训练集占2808张,验证集占747张。部分图像如下图所示:
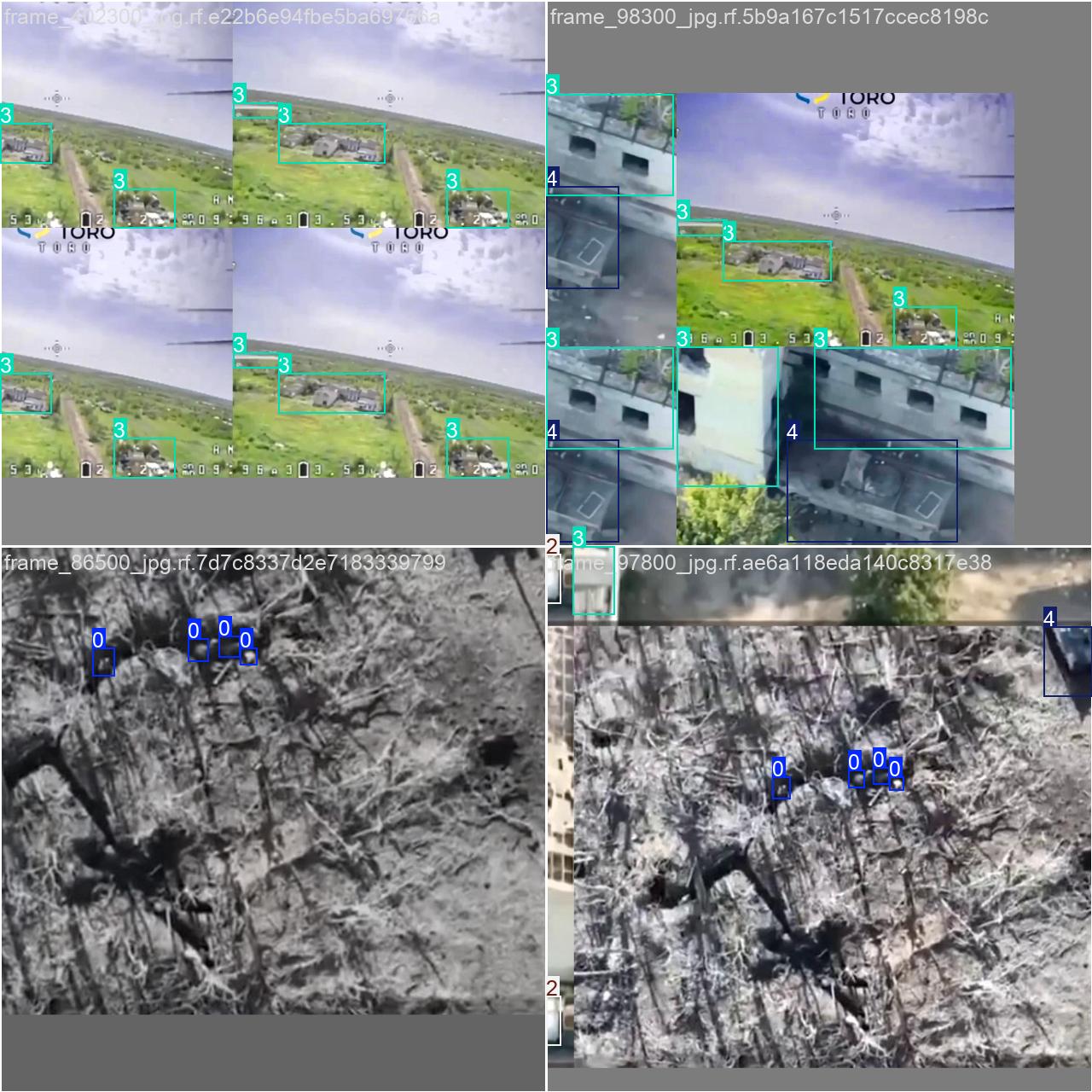
部分标注如下图所示:
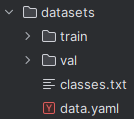
图片数据的存放格式如下,在项目目录中新建datasets目录,同时将检测的图片分为训练集与验证集放入datasets目录下。
接着需要新建一个data.yaml文件,用于存储训练数据的路径及模型需要进行检测的类别。YOLOv8在进行模型训练时,会读取该文件的信息,用于进行模型的训练与验证。
data.yaml的具体内容如下:
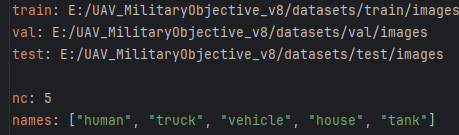
train: E:/UAV_MilitaryObjective_v8/datasets/train/images 训练集的路径
val: E:/UAV_MilitaryObjective_v8/datasets/val/images 验证集的路径
test: E:/UAV_MilitaryObjective_v8/datasets/test/images 测试集的路径
nc: 5
names: [“human”, “truck”, “vehicle”, “house”, “tank”]
这个文件定义了用于模型训练和验证的数据集路径,以及模型将要检测的目标类别。
数据准备完成后,通过调用train.py文件进行模型训练,epochs参数用于调整训练的轮数,batch参数用于调整训练的批次大小(根据内存大小调整,最小为1)。
CPU/GPU训练代码如下:
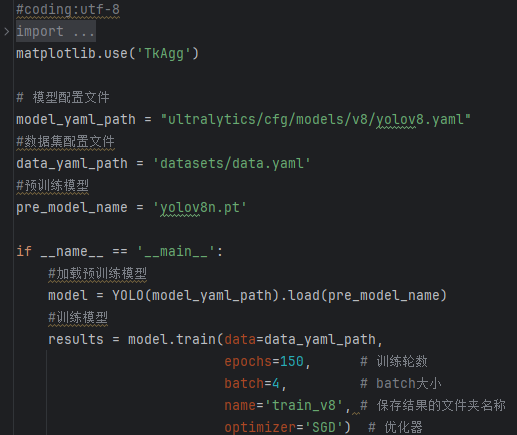
加载名为 yolov8n.pt 的预训练YOLOv8模型,yolov8n.pt是预先训练好的模型文件。
使用YOLO模型进行训练,主要参数说明如下:
(1)data=data_yaml_path: 指定了用于训练的数据集配置文件。
(2)epochs=100: 设定训练的轮数为150轮。
(3)batch=4: 指定了每个批次的样本数量为4。
(4)optimizer=’SGD’):SGD 优化器。
(7)name=’train_v8′: 指定了此次训练的命名标签,用于区分不同的训练实验。
3.训练结果评估
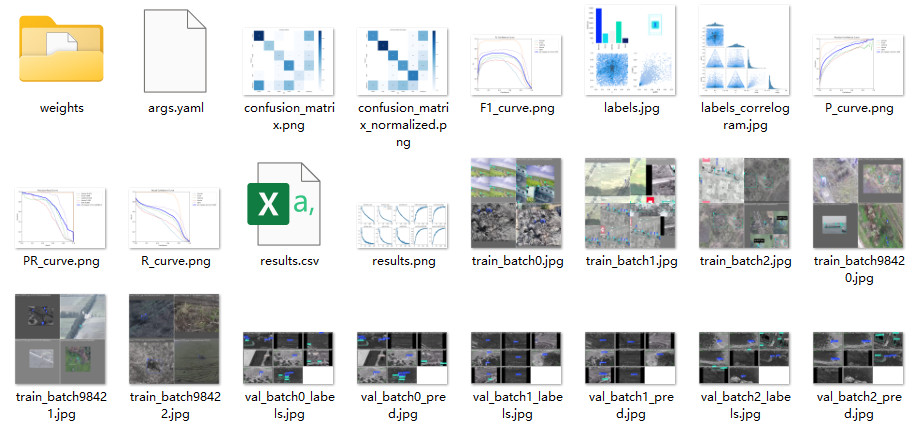
在深度学习的过程中,我们通常通过观察损失函数下降的曲线来了解模型的训练情况。对于YOLOv8模型的训练,主要涉及三类损失:定位损失(box_loss)、分类损失(cls_loss)以及动态特征损失(dfl_loss)。训练完成后,相关的训练过程和结果文件会保存在 runs/ 目录下,具体如下:
各损失函数作用说明:
定位损失box_loss:预测框与标定框之间的误差(GIoU),越小定位得越准;
分类损失cls_loss:计算锚框与对应的标定分类是否正确,越小分类得越准;
动态特征损失(dfl_loss):DFLLoss是一种用于回归预测框与目标框之间距离的损失函数。在计算损失时,目标框需要缩放到特征图尺度,即除以相应的stride,并与预测的边界框计算Ciou Loss,同时与预测的anchors中心点到各边的距离计算回归DFLLoss。这个过程是YOLOv8训练流程中的一部分,通过计算DFLLoss可以更准确地调整预测框的位置,提高目标检测的准确性。
训练结果如下:

这张图展示了YOLOv8模型在训练和验证过程中的多个重要指标的变化趋势,具体如下:
train/box_loss:
(1)这是训练过程中边界框损失的变化。边界框损失用于衡量模型预测的目标框与实际目标框的差异。
(2)随着训练轮次(epochs)的增加,损失逐渐降低,表明模型在不断优化边界框的预测精度。
train/cls_loss:
(1)这是训练集上的分类损失。分类损失衡量模型对目标类别的预测准确性。
(2)分类损失表示模型在分类任务上的错误率,损失值的降低表明模型的分类能力逐渐提高。
train/dfl_loss:
(1)这是分布聚焦损失(distribution focal loss),用于帮助模型对目标框的精确定位。
(2)图中可以看到损失值在逐渐下降,说明模型在逐渐优化边界框的预测。
metrics/precision(B):
(1)这是训练集上的精度(precision)曲线。精度表示模型在检测到的目标中有多少是真正的目标。
(2)随着训练的进行,精度逐渐上升,表示模型越来越能够准确地检测出目标。
metrics/recall(B):
(1)这是训练集上的召回率(recall)曲线。召回率表示模型检测出的真实目标的比例。
(2)召回率随着训练轮次的增加而逐步提升,表明模型漏检的情况逐渐减少。
val/box_loss:
(1)这是验证集上的边界框损失曲线。
(2)随着训练的进行,损失逐渐下降,表明模型在验证集上有更好的泛化能力。
val/cls_loss:
(1)这是验证集上的分类损失曲线。
(2)随着训练的进行,分类损失逐渐下降,说明模型在验证集上的分类表现也在提升。
val/dfl_loss:
(1)这是验证集上的分布聚焦损失曲线。
(2)和训练集类似,随着训练的进行,损失逐渐下降。
metrics/mAP50(B):
(1)这是验证集上的mAP50曲线,表示在交并比阈值为0.5时模型的平均精度(mean Average Precision)。
(2)随着训练的进行,mAP逐渐提升,表明模型的整体检测精度在提高。
metrics/mAP50-95(B):
(1)这是验证集上的mAP50-95曲线,表示在不同交并比阈值(从0.5到0.95)下模型的平均精度。
(2)随着训练的进行,mAP@50-95逐渐上升,表示模型在各个IoU阈值下的表现都在提升。
这张图的整体趋势显示,随着训练轮次的增加,模型的损失函数(box_loss、cls_loss、dfl_loss)在训练集和验证集上都在逐渐下降,模型性能不断提升。同时,精度、召回率和mAP指标的不断上升表明,模型在目标检测任务上的准确率、识别率和整体性能都有所提高。这些图表明,模型正在收敛,并且在检测任务中表现出较好的泛化能力。

这张图展示的是 Precision-Recall 曲线,用于评估模型在不同类别下的检测性能。以下是详细解释:
不同颜色代表的类别:
(1)蓝色曲线(human 0.603):对应作战人员(human)类别的Precision-Recall曲线,mAP(平均精度)为0.603。曲线显示该类别的精度和召回率之间的权衡,表现出中等检测效果。
(2)橙色曲线(truck 0.984):对应装甲车(truck)类别,mAP为0.984。该类别的曲线接近右上角,表示模型对卡车的检测非常准确且几乎没有漏检,性能表现最佳。
(3)绿色曲线(vehicle 0.628):对应军用车辆(vehicle)类别,mAP为0.628。曲线显示精度和召回率的表现较为一般,检测效果中等。
(4)红色曲线(house 0.561):对应房屋工事(house)类别,mAP为0.561。曲线较低,表明模型在检测房屋工事时的精度和召回率相对较低,检测效果较弱。
(5)紫色曲线(tank 0.806):对应坦克(tank)类别,mAP为0.806。该类别的检测效果较好,精度和召回率在大部分情况下表现稳定。
(6)深蓝色粗线(all classes 0.716 mAP@0.5):表示所有类别的整体表现,mAP为0.716,说明模型在所有类别上的平均检测性能不错,但不同类别的表现有所不同。
从图中可以看出,卡车(truck) 类别的检测性能最佳,曲线接近右上角,表明几乎所有的卡车都能被正确检测到,并且误检率非常低。
坦克(tank) 类别的性能也较为优秀,人(human) 和 车辆(vehicle) 类别表现中等。
房屋工事(house) 类别的检测效果相对较差,曲线表现较为不理想,表明在该类别上模型的检测效果较弱。
整体来看,模型在所有类别上的平均检测效果较好,具有较高的mAP(0.716),但仍有部分类别需要进一步优化。
4.检测结果识别
模型训练完成后,我们可以得到一个最佳的训练结果模型best.pt文件,在runs/train/weights目录下。我们可以使用该文件进行后续的推理检测。
imgTest.py 图片检测代码如下:
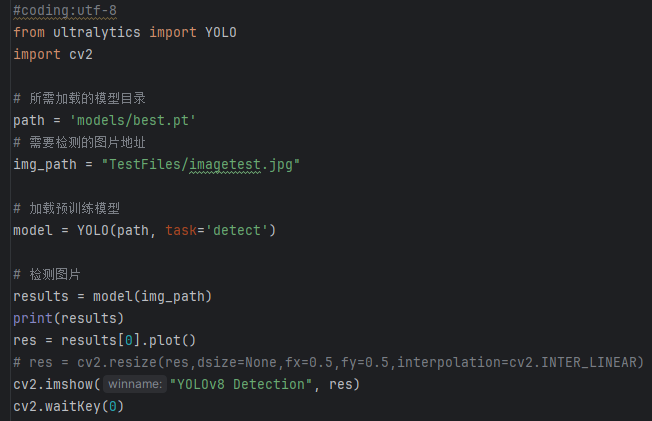
加载所需库:
(1)from ultralytics import YOLO:导入YOLO模型类,用于进行目标检测。
(2)import cv2:导入OpenCV库,用于图像处理和显示。
加载模型路径和图片路径:
(1)path = ‘models/best.pt’:指定预训练模型的路径,这个模型将用于目标检测任务。
(2)img_path = “TestFiles/imagetest.jpg”:指定需要进行检测的图片文件的路径。
加载预训练模型:
(1)model = YOLO(path, task=’detect’):使用指定路径加载YOLO模型,并指定检测任务为目标检测 (detect)。
(2)通过 conf 参数设置目标检测的置信度阈值,通过 iou 参数设置非极大值抑制(NMS)的交并比(IoU)阈值。
检测图片:
(1)results = model(img_path):对指定的图片执行目标检测,results 包含检测结果。
显示检测结果:
(1)res = results[0].plot():将检测到的结果绘制在图片上。
(2)cv2.imshow(“YOLOv8 Detection”, res):使用OpenCV显示检测后的图片,窗口标题为“YOLOv8 Detection”。
(3)cv2.waitKey(0):等待用户按键关闭显示窗口
此代码的功能是加载一个预训练的YOLOv8模型,对指定的图片进行目标检测,并将检测结果显示出来。
执行imgTest.py代码后,会将执行的结果直接标注在图片上,结果如下:

这段输出是基于YOLOv8模型对图片“imagetest.jpg”进行检测的结果,具体内容如下:
图像信息:
(1)处理的图像路径为:TestFiles/imagetest.jpg。
(2)图像尺寸为 480×640 像素。
检测结果:
(1)模型在该图片上检测到 1 个坦克(”1 tank”)
处理速度:
(1)预处理时间:图像处理前的预处理时间为 2.0 毫秒(ms)。
(2)推理时间:模型对图像进行检测的推理时间为 36.9 毫秒(ms)。
(3)后处理时间:推理后对结果的处理时间为 51.3 毫秒(ms)
这个结果表明,系统成功地检测到了坦克,并对图像进行了目标检测处理,同时提供了详细的时间消耗信息以便评估模型的效率。
运行效果
– 运行 MainProgram.py

1.主要功能:
(1)可用于实时检测目标图片中的军事打击目标检测;
(2)支持图片、视频及摄像头进行检测,同时支持图片的批量检测;
(3)界面可实时显示目标位置、目标总数、置信度、用时等信息;
(4)支持图片或者视频的检测结果保存。
2.检测结果说明:

这张图表显示了基于YOLOv8模型的目标检测系统的检测结果界面。以下是各个字段的含义解释:
用时(Time taken):
(1)这表示模型完成检测所用的时间为0.014秒。
(2)这显示了模型的实时性,检测速度非常快。
目标数目(Number of objects detected):
(1)检测到的目标数目为1,表示这是当前检测到的第1个目标。
目标选择(下拉菜单):全部:
(1)这里有一个下拉菜单,用户可以选择要查看的目标类型。
(2)在当前情况下,选择的是“全部”,意味着显示所有检测到的目标信息。
类型(Type):
(1)当前选中的行为类型为 “军用车辆”,表示系统正在高亮显示检测到的“vehicle”。
置信度(Confidence):
(1)这表示模型对检测到的目标属于“军用车辆”类别的置信度为95.89%。
(2)置信度反映了模型的信心,置信度越高,模型对这个检测结果越有信心。
目标位置(Object location):
(1)xmin: 164, ymin: 267:目标的左上角的坐标(xmin, ymin),表示目标区域在图像中的位置。
(2)xmax: 283, ymax: 386:目标的右下角的坐标(xmax, ymax),表示目标区域的边界。
这些坐标表示在图像中的目标区域范围,框定了检测到的“军用车辆”的位置。
这张图展示了军事打击目标的一次检测结果,包括检测时间、检测到的种类、各行为的置信度、目标的位置信息等。用户可以通过界面查看并分析检测结果,提升军事打击目标检测的效率。
3.图片检测说明
(1)房屋工事

(2)军用车辆

(3)坦克

(4)装甲车

(5)作战人员

点击打开图片按钮,选择需要检测的图片,或者点击打开文件夹按钮,选择需要批量检测图片所在的文件夹。
操作演示如下:
(1)点击目标下拉框后,可以选定指定目标的结果信息进行显示。
(2)点击保存按钮,会对检测结果进行保存,存储路径为:save_data目录下。
检测结果:系统识别出图片中的军事打击目标,并显示检测结果,包括总目标数、用时、目标类型、置信度、以及目标的位置坐标信息。
4.视频检测说明

点击视频按钮,打开选择需要检测的视频,就会自动显示检测结果,再次点击可以关闭视频。
点击保存按钮,会对视频检测结果进行保存,存储路径为:save_data目录下。
检测结果:系统对视频进行实时分析,检测到军事打击目标并显示检测结果。表格显示了视频中多个检测结果的置信度和位置信息。
这个界面展示了系统对视频帧中的多目标检测能力,能够准确识别军事打击目标,并提供详细的检测结果和置信度评分。
5.摄像头检测说明

点击打开摄像头按钮,可以打开摄像头,可以实时进行检测,再次点击,可关闭摄像头。
检测结果:系统连接摄像头进行实时分析,检测到军事打击目标并显示检测结果。实时显示摄像头画面,并将检测到的行为位置标注在图像上,表格下方记录了每一帧中检测结果的详细信息。
6.保存图片与视频检测说明

点击保存按钮后,会将当前选择的图片(含批量图片)或者视频的检测结果进行保存。
检测的图片与视频结果会存储在save_data目录下。
保存的检测结果文件如下:
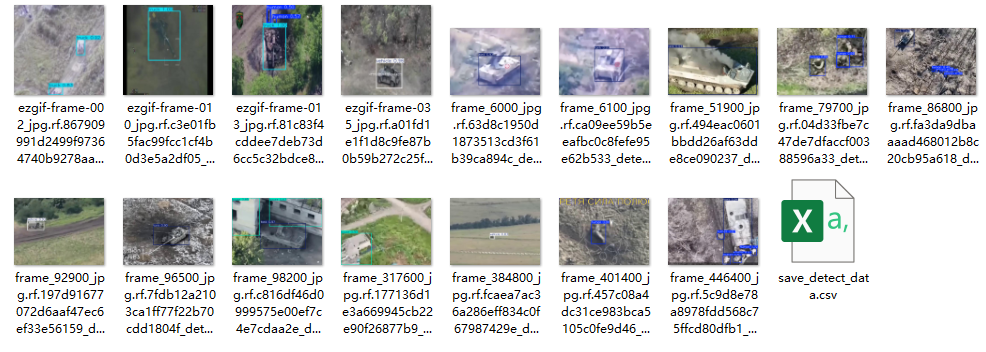
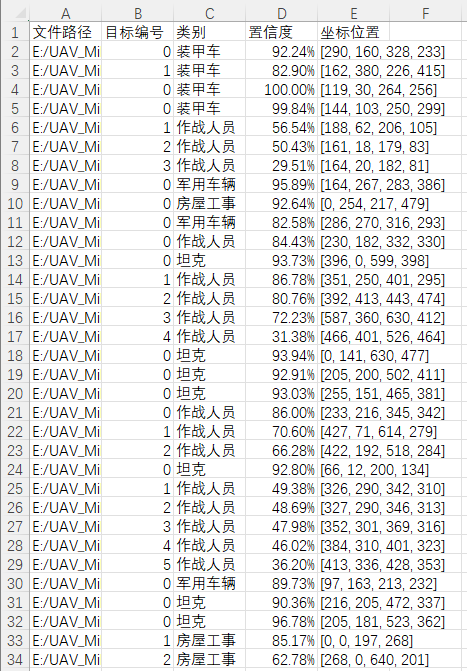
图片文件保存的csv文件内容如下,包括图片路径、目标在图片中的编号、目标类别、置信度、目标坐标位置。
注:其中坐标位置是代表检测框的左上角与右下角两个点的x、y坐标。
(1)图片保存

(2)视频保存

– 运行 train.py
1.训练参数设置
(1)data=data_yaml_path: 使用data.yaml中定义的数据集。
(2)epochs=150: 训练的轮数设置为100轮。
(3)batch=4: 每个批次的图像数量为4(批次大小)。
(4)name=’train_v8′: 训练结果将保存到以train_v8为名字的目录中。
(5)optimizer=’SGD’: 使用随机梯度下降法(SGD)作为优化器。
虽然在大多数深度学习任务中,GPU通常会提供更快的训练速度。
但在某些情况下,可能由于硬件限制或其他原因,用户需要在CPU上进行训练。
温馨提示:在CPU上训练深度学习模型通常会比在GPU上慢得多,尤其是像YOLOv8这样的计算密集型模型。除非特定需要,通常建议在GPU上进行训练以节省时间。
2.训练日志结果
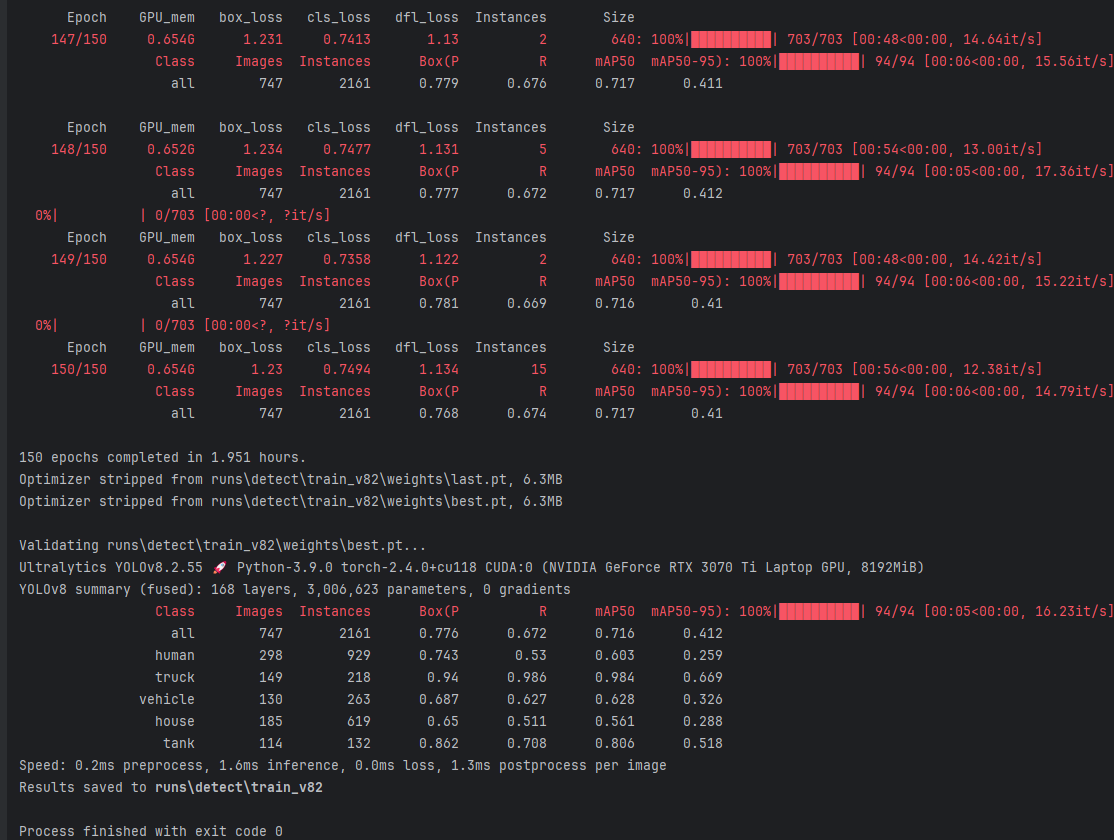
这张图展示了使用YOLOv8进行模型训练的详细过程和结果。
训练总时长:
(1)模型在训练了150轮后,总共耗时1.951小时。
mAP50和mAP50-95:
(1)“tank”类别的mAP50为0.806,精度较高,而“house”的mAP50为0.561。
(2)“truck”的mAP50-95为0.669,表现出较高的总体检测性能,而“human”的mAP50-95仅为0.259,表现相对较差。
速度:
(1)预处理时间:0.2ms
(2)推理时间:1.6ms
(3)后处理时间:1.3ms
结果保存:
(1)Results saved to runs\detect\train_v8:验证结果保存在 runs\detect\train_v8 目录下。
完成信息:
(1)Process finished with exit code 0:表示整个验证过程顺利完成,没有报错。
展示了YOLOv8模型在训练和验证过程中的性能表现和速度信息,模型的性能稳定,推理速度也比较快。



