一、配置源
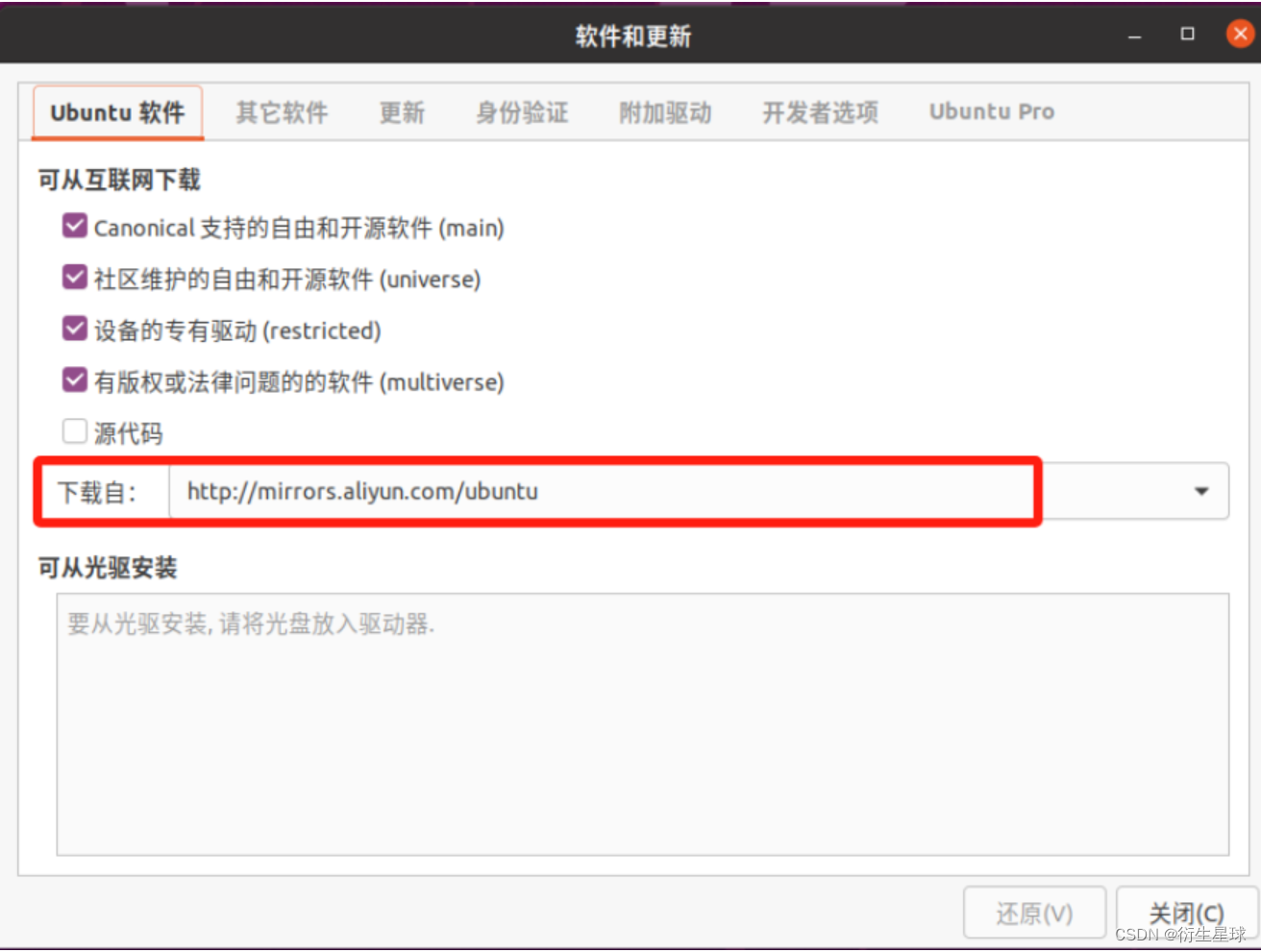
安装成功的Ubuntu系统自带的工具下载速度慢,不太好用,所以我们可以使用国内稳定高速且免费的镜像网站。
清华源:https://pypi.tuna.tsinghua.edu.cn/simple/
阿里云:https://mirrors.aliyun.com/pypi/simple
中科大:https://pypi.mirrors.ustc.edu.cn/simple/
这里我们配置的是阿里源。
ROS_13">二、ROS安装
1、添加ros软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main"> /etc/apt/sources.list.d/ros-latest.list'
2、添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
ROSUbuntu__24">3、安装ROS(注意Ubuntu 版本)
sudo apt update# Ubuntu 20.04
sudo apt install ros-noetic-desktop-full# Ubuntu 18.04
sudo apt install ros-melodic-desktop-full
4、初始化rosdep
sudo rosdep init && rosdep update
自带的可能会出现错误。可以使用大神基于 rosdep 源码写的rosdepc。
sudo pip install rosdepc# 没有pip可以试试pip3
sudo pip3 install rosdepc# pip3没有选择安装
sudo apt-get install python3-pip
sudo pip install rosdepc
5、再次初始化
sudo rosdepc init
rosdepc update
6、配置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
7、安装 rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
ROS_64">8、测试ROS(打开三个终端窗口)
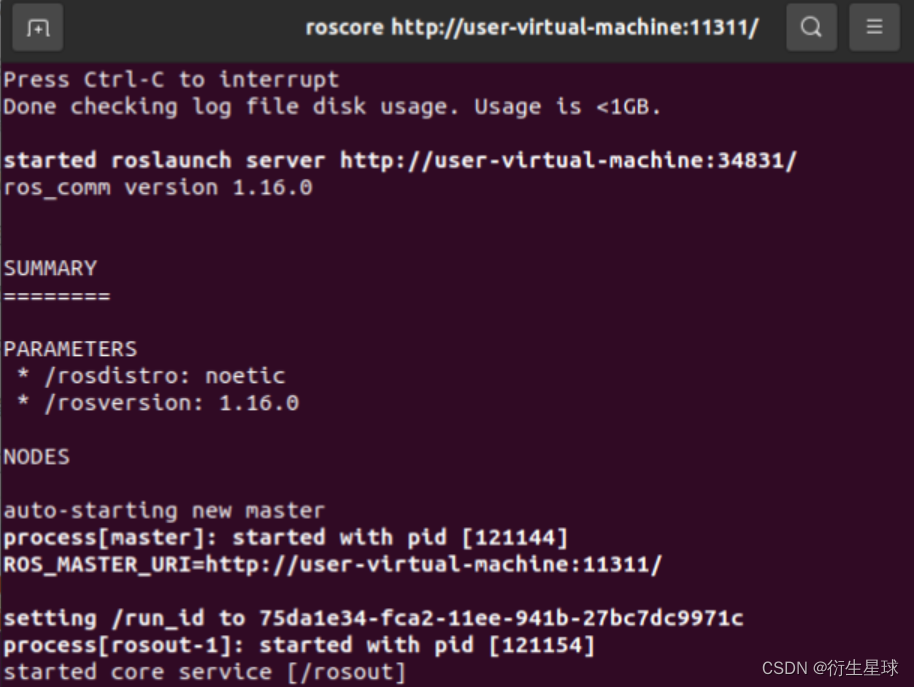
第一个窗口运行 roscore
roscore
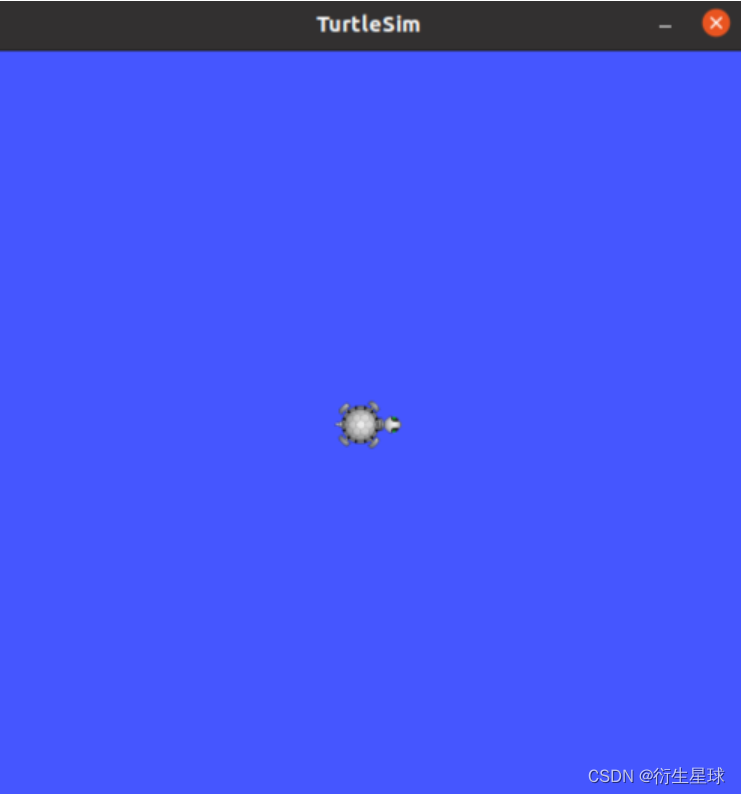
第二个终端窗口,输入:
rosrun turtlesim turtlesim_node
当出现有一个海龟的窗口,证明运行成功了
打开第三个终端窗口,输入:
rosrun turtlesim turtle_teleop_key
出现这样的提示后,我们用鼠标聚焦第三个终端窗口,便可以通过按下 ↑ ↓ ← →键来对小海龟进行控制。


![BUUCTF——[GXYCTF2019]BabyUpload](https://img-blog.csdnimg.cn/direct/0edc8bf2e7e94e46873b33059a214fe9.png)