一、背景
皮带是矿山生产中重要的输送设备,由于设备、环境等原因,皮带易发生跑偏,给企业带来经济损失与安全隐患。现有的皮带跑偏检测方法主要分为人工巡检法与机器视觉检测法。人工巡检存在漏检问题,对于长距离、复杂环境下的皮带跑偏检测并不适用。机器视觉检测法分为边缘检测与目标检测两种方法。
在机器视觉检测方法中,对于前者,利用边缘检测算子提取皮带边缘,然后通过检测边缘与标定区域之间的位置关系判定是否发生皮带跑偏。当光线或皮带物料发生变化时,边缘检测鲁棒性不足。对于后者,利用目标识别算法识别裸露的皮带托辊。根据检测区域内托辊的数量判定是否发生皮带跑偏。由于托辊颜色、形态各异,且受到运行环境因素影响,托辊易被物料覆盖,此外受到暗光因素的影响,存在漏检,引发误报。
因此,在实际工程应用中,现有皮带跑偏检测算法存在较为严重的误报问题。因此,如何提高皮带跑偏检测算法的准确率是工程应用面临的一大难题。

二、难点解析
目前,皮带跑偏检测算法的核心问题为准确率不足,AI机器视觉检测难点主要体现在以下三个方面。
1、光线变化且暗光条件目标特征难以辨别
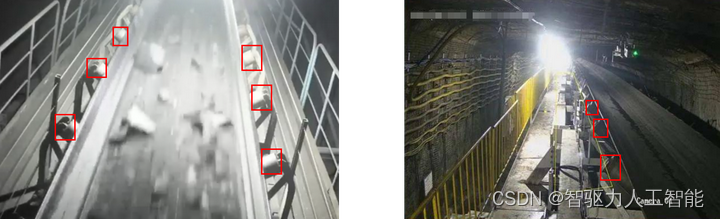
皮带现场运行环境光线变化复杂,且容易出现暗光。基于目标检测的皮带跑偏检测需实时识别托辊目标。若出现暗光,托辊特征呈现暗黑色,导致轮廓或纹理辨别不清。对此,易造成托辊目标检测的漏报,系统基于某一侧托辊数量降低,误判为皮带跑偏。

如上左图,暗光导致的皮带右侧托辊纹理等特征辨别不清;如上右图,光线问题导致皮带右侧托辊只有一小部分漏出形状为三角形,可用特征较少,容易造成检测目标的漏报。
2、粉尘或环境造成检测目标遮挡
皮带运行工况复杂,输送物料多呈现颗粒状或粉状。若在下料口,物料卸至皮带容易出现粉尘,从而遮挡检测目标。此外,现场皮带托辊处存在人为引入的异物易造成托辊的遮挡。因此,粉尘或异物遮挡易造成托辊检测目标的漏报。

如上左图,粉尘造成皮带遮挡,难以辨别托辊特征;如上右图,皮带下方两个托辊中间引入了木板异物,造成了左侧托辊的遮挡。可识别的特征较少,容易出现托辊漏报,引起皮带偏离检测误报。
3、远距遮挡造成的小目标难以检测
小目标是皮带检测检测难点之一。在煤矿、金矿等井下作业场景,摄像头安装位置、距离、画质易受到环境因素影响。表现为托辊辨别不清或出现遮挡,在远距离场景,托辊目标较小,可用特征较少,因此,可能出现漏报。

如上左图,画质与距离问题导致皮带右侧托辊目标较小;如上右图,摄像头安装视角导致皮带右侧托辊不可见。对此,系统无法识别托辊,造成目标检测漏报,从而引发皮带跑偏系统的误判。
三、解决方案
1、传统方法边缘检测
传统边缘检测方法使用边缘检测算子计算每个像素点的梯度强度与方向,并通过梯度强度阈值对边缘检测点进行过滤。如下图,原始图经过边缘检测算法得到边缘图,通过选取合适的阈值对非皮带边缘进行过滤。受光线变化以及背景噪声的影响,阈值难以选取。因此,难以获取稳定、高精度的皮带边缘。

2、深度学习目标检测
深度学习目标检测通过检测皮带两侧的托辊个数判断是否发生皮带偏离。当一侧的托辊个数小于阈值时,判定皮带向该侧发生了偏离。由于暗光、遮挡、远距、环境等问题造成托辊不可见或只有少部分特征可见,造成托辊漏检。该方式受外界环境影响大,工程应用中偏离检测鲁棒性不足。
在工程实践中,以上两种方法均不能适应复杂多变生产工况,原因是环境因素易造成边缘检测失稳或托辊漏检。在难点分析中,光线变化、托辊遮挡等复杂条件下均可不同程度辨别皮带边缘特征。因此,从直觉上,皮带边缘特征更具鲁棒性。而传统图像处理方式,在边缘检测上鲁棒性不足。受到车道线检测的启发,将皮带边缘检测转化为车道线检测问题。
3、深度学习边缘检测
通过深度学习识别皮带边缘,并判断与皮带无偏区域的位置关系判定是否皮带偏离。模型的输入为原始图像,输出为皮带边缘像素点。由于皮带边缘所占像素少,为了更好的利用边缘的上下文信息,对边缘在宽度方向上扩充,得到如下右图的二值化图,其中白色实线为需要预测的皮带边缘。

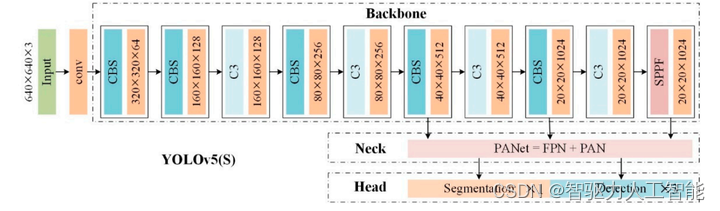
分割模型采用yolov5-instance segmentation,网络结构如下图,在head中输出分割区域与分割区域类别。
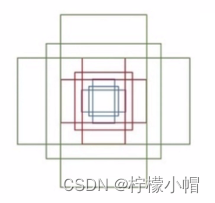
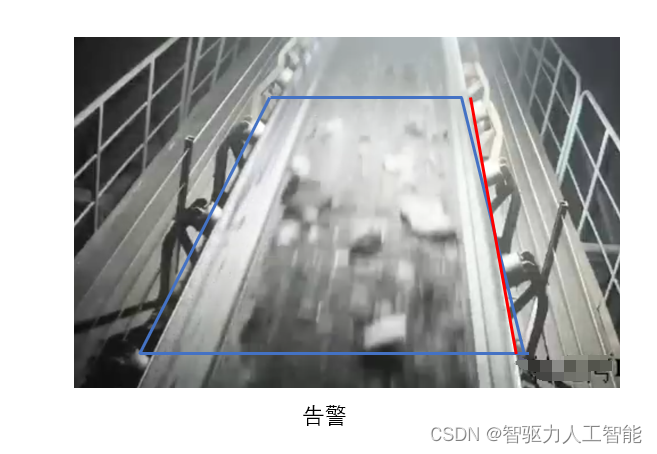
偏离判定方法:如下图蓝色区域为皮带偏离无偏区域,红色线为检测到的皮带边缘,红色线与标定区域右侧存在交点,判定为皮带发生偏离。
在工程实践中,本方案提出的皮带偏离检测方法,更具鲁棒性,对环境的敏感性较低,在皮带边缘可辨别的情况下能够模型能够准确稳定检测。适用于室内、室外矿山、砂石厂、煤矿带式输送机皮带跑偏检测。