智造未来竞赛
- 一、参赛规则
- 二、竞赛流程
- 三、竞赛环境
- 四、相关说明
- 初中组
- 1.器材要求
- 2.场地
- 3.任务概述:
- 1. 装卸(模块A)
- 2. 质检(模块E)
- 3. 运输(模块G)
- 4. 分拣(模块F)
- 5. 传送(模块B)
- 6. 仓储(模块D)
- 7. 组装(模块C)
- 4.成绩计算说明
- 高中组
- 1.器材要求
- 2.场地
- 3.任务概述:
- 1.货物入库(独立任务)
- 2.货物分装(独立任务)
- 3.特殊货物分装(独立任务)
- 4.货物垒放(独立任务)
- 5.自动分配(独立任务)
- 6.车辆检修(独立任务)
- 7.物流跟踪(联盟任务)
- 8.物资转运(联盟任务)
- 9.立体配送(联盟任务)
- 4.任务变量
一、参赛规则
- 参赛组别:小学组、初中组、高中组(含中专、职高)。
- 参赛人数:2人/队伍。
- 指导教师:1人(可空缺)。
- 每人限参加1个赛项、1支队伍。
- 组别确定:以地方教育行政主管部门认定的选手所属学段为准。
二、竞赛流程
- 报 名 : 参 赛 选 手 在 规 定 时 间 内 登 录 NOC 大赛官网
报名官网(www.noc.net.cn)进行报名,报名成功的选手具备参赛资格 - 选拔赛:依据全国组委会规定的方式,组织参赛选手在规定的时间内进行比赛,产生晋级全国决赛的选手。
- 全国决赛:入围选手现场确定一、二、三等奖。
三、竞赛环境
- 编程系统:能够完成竞赛的编程软件。
- 编程电脑:参赛选手自带能够满足竞赛用的笔记本电脑,
并保证比赛时笔记本电脑电量充足(可自备移动充电设备)。 - 禁带设备:U 盘、手机、对讲机等。
四、相关说明
- 参赛选手可同校组队参赛,亦可地级市内跨校组队参赛;不得2022-2023 学年全国中小学信息技术创新与实践大赛跨省、跨地级市组队报名参赛。
- 每位指导教师同赛项限指导不超过 9 支队伍。
- 本规则是实施裁判工作的依据,在竞赛过程中裁判(评委)有最终裁定权。凡是规则中没有说明的事项由裁判组决定。
- 本赛项全国决赛各组别一等奖前三名获得者具有“恩欧希教育信息化发明创新奖”评选资格,评选方式另行通知。
初中组
参数队伍规模: 2人为组
比赛形式: 任务赛
比赛时间: 120秒
1.器材要求
- 机器人数量:
1台机器人- 机器人规格: 机器人收缩尺寸不得大于
长25cm×宽25cm×高25cm,检录时须上电。- 机器人控制器: 机器人的主控必须支持蓝牙连接和图形化编程,同时支持一口串联多个外接传感器和执行器的连接方式,现场编程开始前,机器人控制器内不得有任何程序。
- 机器人执行器: 机器人使用的伺服舵机必须支持“
角模式”和“轮模式”两种工作模式,舵机具备角度回读功能,数量不限。- 传感器: 每台机器人允许使用的传感器
种类、数量不限- 电机: 转速要求不大于
140rpm,数量不限。- 机器人结构: 机器人必须使用塑料材质的拼插式结构,不得使用扎带、螺钉、铆钉、胶水、胶带、皮筋等辅助连接材料。
- 机器人电源: 每台机器人不得连接外部电源,电池电压不得高于9V,不得使用升压、降压、稳压等电路。
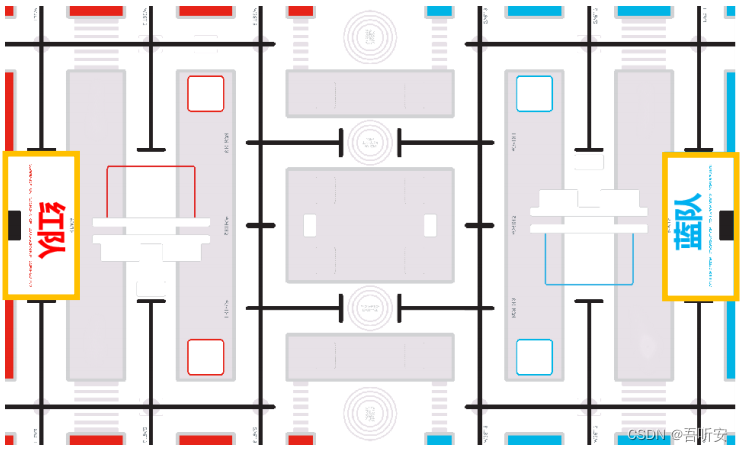
2.场地
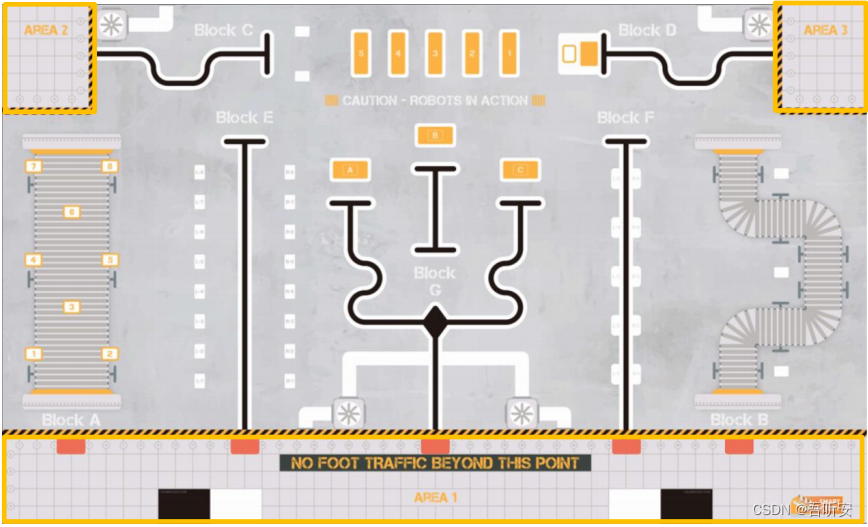
- 地图材质为 PP 裱地板膜。
- 场地尺寸为
长250cm×宽 150cm。 - 3 处黄框部分为启动区
AREA1 尺寸为长250cm×宽25cm,
AREA2、AREA3 尺寸均为长30cm×宽25cm
其余部分为任务区。 - AREA 1 启动区中摆放 5 个任务红色定位卡,每个任务对应一张,位置如示意图所示。
3.任务概述:
- AREA1区出发,依次自主完成装卸、质检、运输、分拣、传送任务。当装卸任务完成后,机器人自主返回AREA1区,并运动道质检任务出发定位色卡处,然后出发执行下一个任务,直到完成传送任务后并静止。
- 机器人再由AREA 3启动区出发,自主完成仓储任务并静止。
- 机器人最后由AREA 2启动区出发,自主完成组装任务并静止。
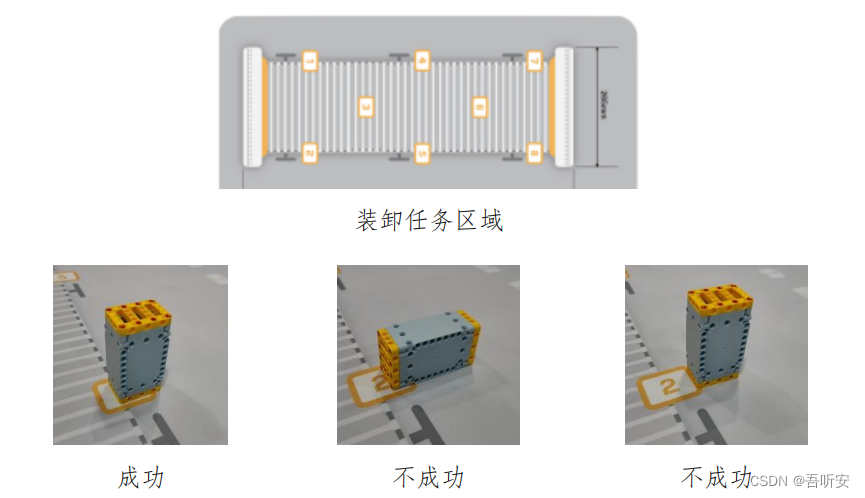
1. 装卸(模块A)
机器人从AREA 1出发运行至装卸任务区域,将1个A型箱模型从规定的初始矩形框拿起并运送至规定的目标矩形框,A型箱模型直立且垂直投影与目标矩形框(不含橙色边框)有接触视为成功。示意图如下:
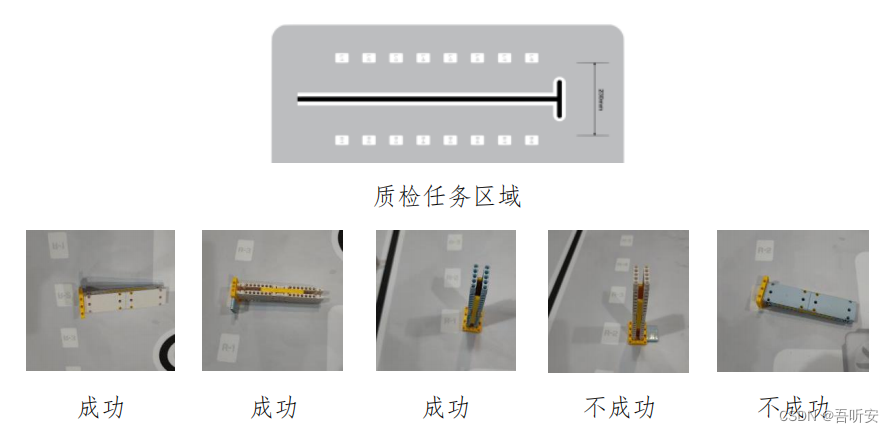
2. 质检(模块E)
机器人须从AREA 1出发运行至质检任务区域,须沿黑线行驶,击倒3个白色B型立柱且不碰倒3个蓝色B型立柱视为成功。示意图如下:
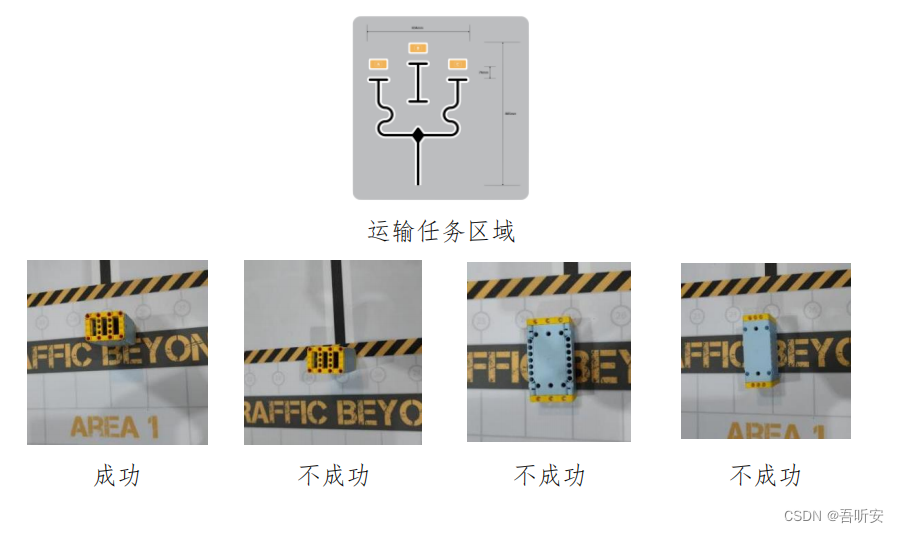
3. 运输(模块G)
机器人须从AREA 1出发运行至运输任务区域,须沿黑线行驶,将A型箱模型运送回AREA 1区域内并直立放置,且A型箱模型垂直投影不得接触橙黑警戒线视为成功,示意图如下:
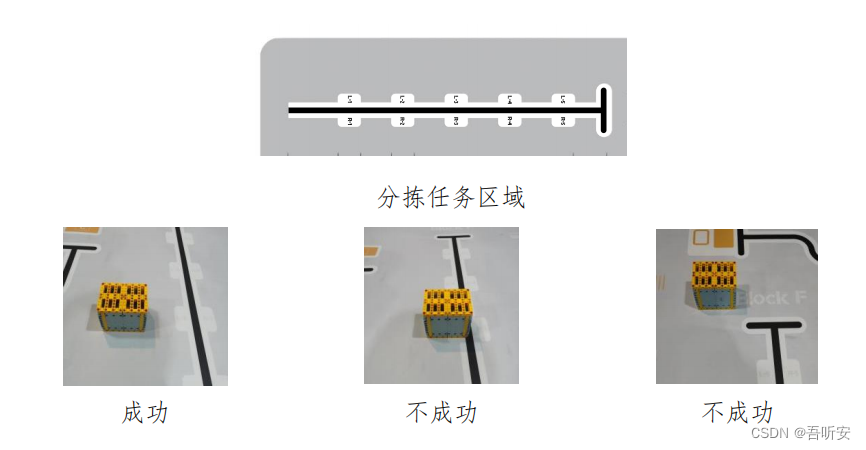
4. 分拣(模块F)
机器人须从AREA 1出发运行至分拣任务区域,须沿黑线行驶,自主寻找3个C型箱(沿黑线居中垂直摆放)并将其移动至黑线的左侧或右侧且箱体垂直投影与黑线无交集视为成功,示意图如下:
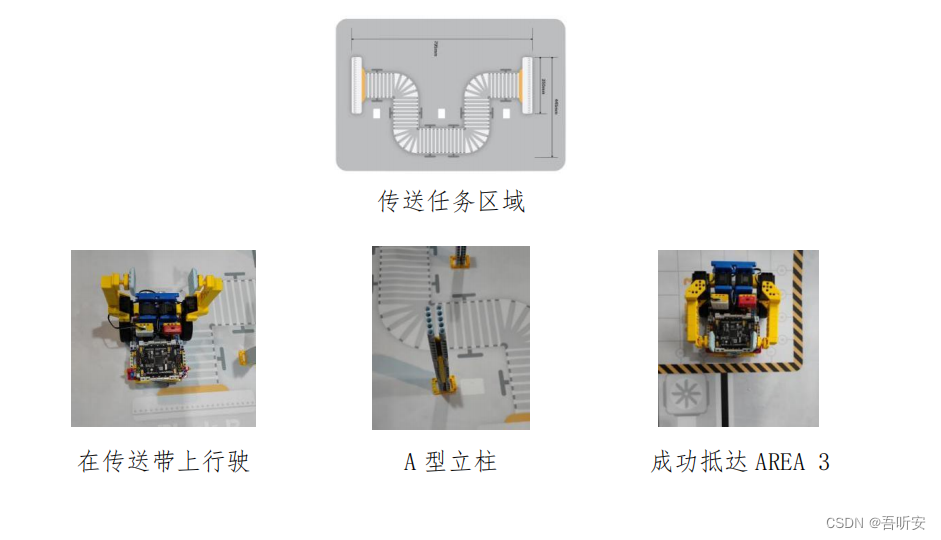
5. 传送(模块B)
机器人从AREA 1出发运行至传送任务区域,须在传送带上行驶且不得碰倒A型立柱模型,机器人停止在AREA 3且轮子或履带与区域有接触视为成功,示意图如下:
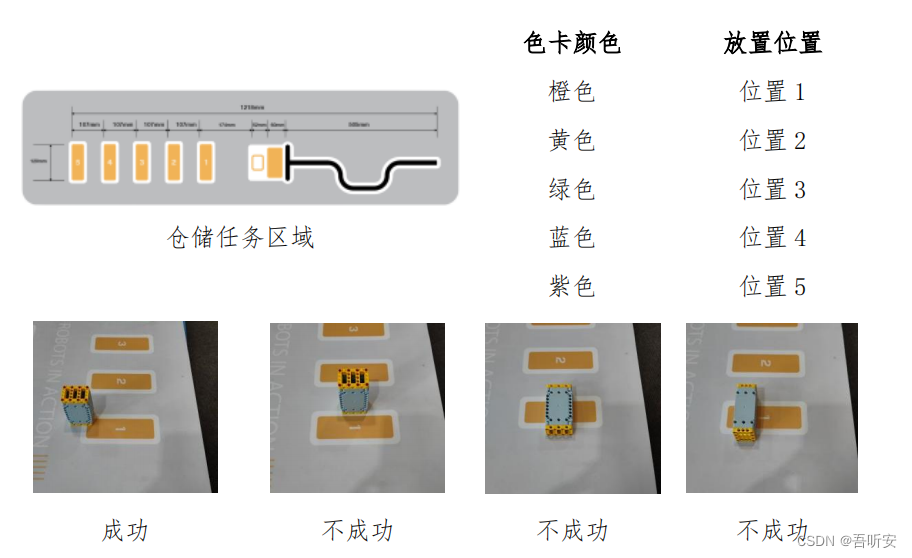
6. 仓储(模块D)
机器人须从AREA 3出发运行至仓储任务区域,须沿黑线行驶,识别地面色卡颜色并根据识别结果将1个A型箱模型运送到对应的位置放下。箱子直立且垂直投影与放置位置(不含白色边框)有接触视为成功,示意图如下:
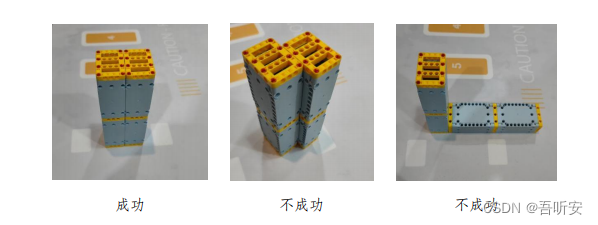
7. 组装(模块C)
机器人从AREA 2出发运行至组装任务区域,须沿黑线行驶,将2个B型箱均移出白色区域(模型垂直投影完全在白色区域外)合并且直立。

4.成绩计算说明
高中组
参数队伍规模: 2人为组
比赛形式: 任务赛
比赛时间: 180秒
1.器材要求
- 机器人数量:
1台机器人- 机器人规格: 机器人收缩尺寸不得大于
长25cm×宽25cm×高25cm,检录时须上电。- 机器人控制器: 机器人的主控必须支持蓝牙连接和图形化编程,同时支持一口串联多个外接传感器和执行器的连接方式,现场编程开始前,机器人控制器内不得有任何程序。
- 机器人执行器: 机器人使用的伺服舵机必须支持“
角模式”和“轮模式”两种工作模式,舵机具备角度回读功能,数量不限。- 传感器: 每台机器人允许使用的传感器
种类、数量不限- 电机: 转速要求不大于
140rpm,数量不限。- 机器人结构: 机器人必须使用塑料材质的拼插式结构,不得使用扎带、螺钉、铆钉、胶水、胶带、皮筋等辅助连接材料。
- 机器人电源: 每台机器人不得连接外部电源,电池电压不得高于9V,不得使用升压、降压、稳压等电路。

2.场地
- 地图材质为 PP 裱地板膜。
- 场地尺寸为
长250cm×宽150cm。 - 2处黄框部分为启动区,尺寸均为
长49cm×宽24cm,其余部分为任务区。
3.任务概述:
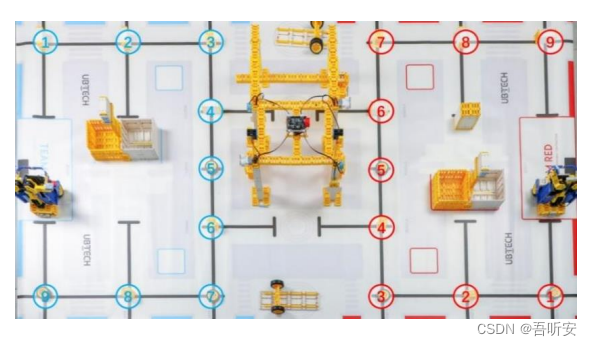
1.货物入库(独立任务)
机器人将 9 个交叉点上随机放置的货物(3 个轮胎、3 个“1 型箱”、3 个“3 型箱”)均运送回启动区内视为成功,示意图如下:
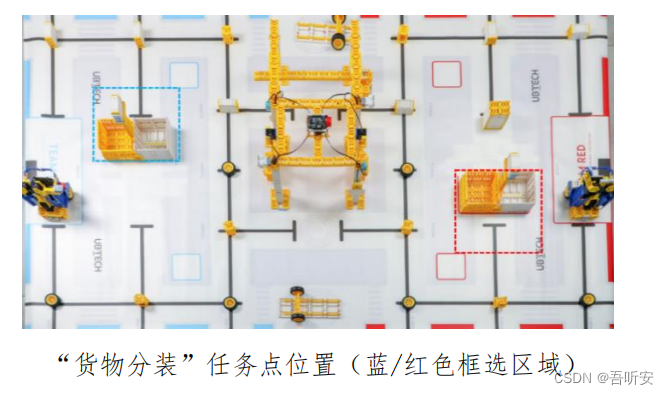
2.货物分装(独立任务)
启动前,选手可在启动区内手动将货物箱置于机器人上。机器人将“货物入库”任务中运送回启动区中的 3 个 1 型箱投放到白色筐型内、3 个 3 型箱投放到黄色筐型内视为成功,示意图如下:
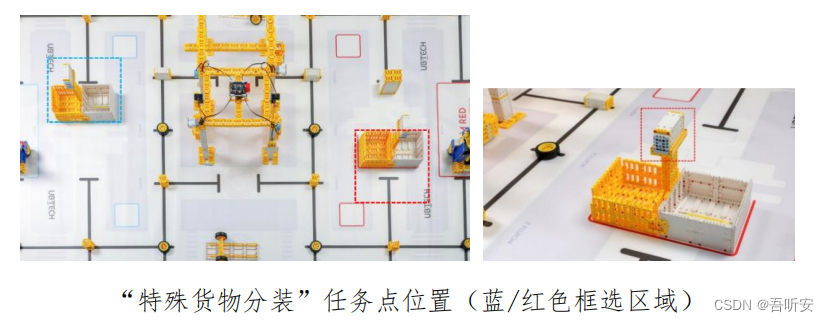
3.特殊货物分装(独立任务)
机器人从货物收集处上方的货物支架处拿取特殊货物并投放至黄色或白色筐型内视为成功,示意图如下:
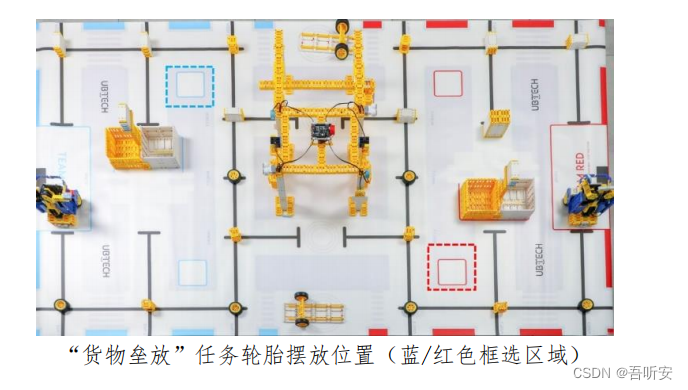
4.货物垒放(独立任务)
启动前,选手将“货物入库”任务中运送回启动区的 3 个轮胎模型均手动放置到机器人上,机器人再将轮胎模型运送至轮胎摆放位置并完成三层垒放(第二、三层轮胎无地面接触,第三层轮胎与第一层轮胎无接触)且第一层轮胎垂直投影完全在放置区域内视为成功,示意图如下:

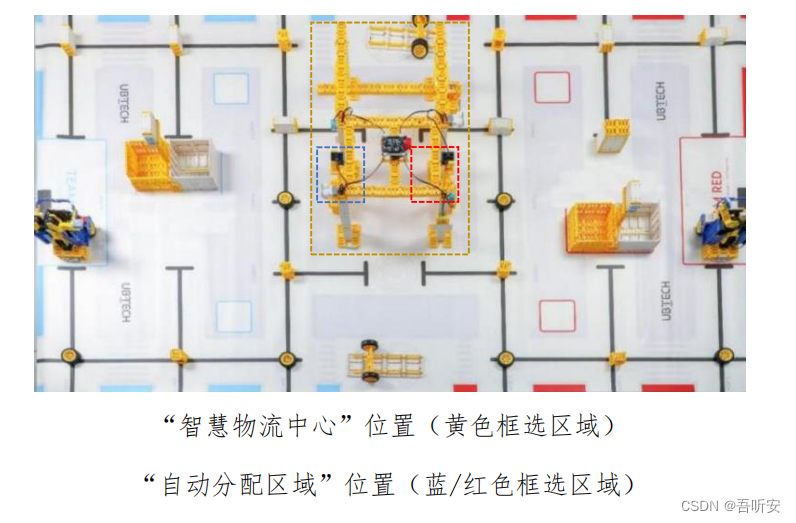
5.自动分配(独立任务)
机器人到达任务点后触发智慧物流中心,智慧物流中心将货物(1型箱)从自动分配区域发出,机器人拾取货物并运回启动区内视为成功,示意图如下:
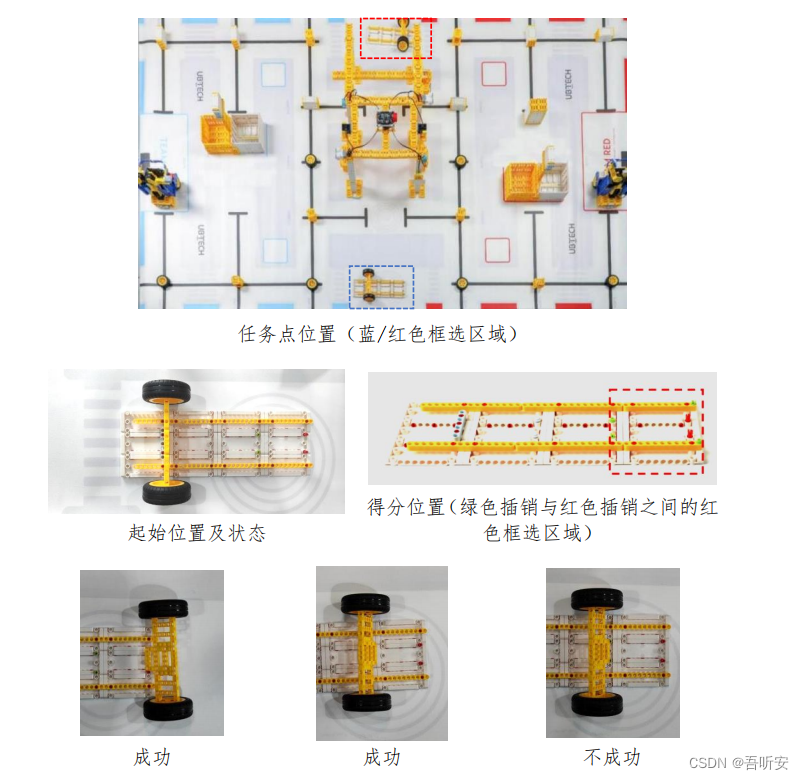
6.车辆检修(独立任务)
机器人到达车辆检修区,利用车身机械结构触碰轮胎组,使轮胎组滚动至指定位置且轮胎组垂直投影与得分位置有重叠视为成功,示意图如下:
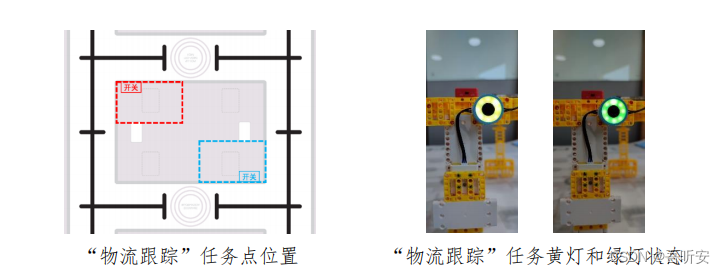
7.物流跟踪(联盟任务)
红蓝双方机器人须触碰己方智慧物流中心区域传感器,任何一方都可先行触碰。一方触碰后,智慧物流中心上的红灯将切换至黄灯;双方均触碰后,指示灯变为绿灯视为成功,示意图如下:
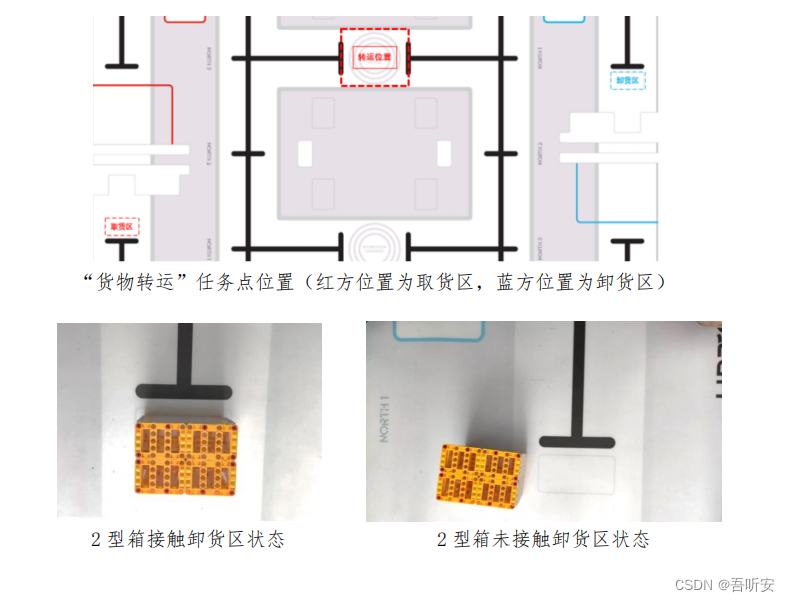
8.物资转运(联盟任务)
红方机器人将 1 个 2 型箱模型从取货区送至转运区,红方机器人不得越过转运区;蓝方机器人在红方机器人放下 2 型箱模型后,再将2 型箱模型送至己方卸货区且垂直投影与区域有接触视为成功,示意图如下:
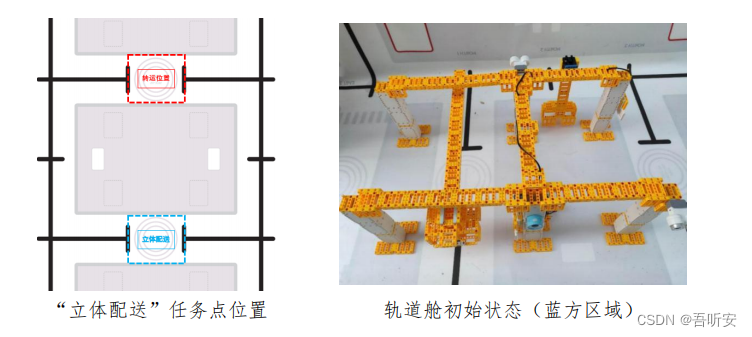
9.立体配送(联盟任务)
蓝方机器人将轨道舱推至立体配送区域,然后红方机器人再将轨道舱从滑轨上取下并运送至己方启动区且垂直投影与区域有接触视为成功,示意图如下:
4.任务变量
- 货物入库任务中,9 个货物(3 个轮胎、3 个“1 型箱”、3
个“3 型箱”)初始摆放位置由裁判在编程前现场公布。- 货物分装任务中,黄色货物收集处和白色货物收集处具体
摆放位置由裁判在编程前现场公布。- 特殊货物分装任务中,特殊货物投放到黄色货物收集处或
白色货物收集处由裁判在编程前现场公布。