CMake初学笔记(一)
- CMake是什么
- CMake怎么实现跨平台
- CMake具体实践过程
- CMakeLists.txt编写快速入门
- 常见函数
- 例子
CMake是什么
跨平台编译工具,为了实现“write once, run everywhere”。
CMake怎么实现跨平台
- 开发者编写与平台无关的编译过程文件,即编写CMakeLists.txt。
- 最终根据目标用户的平台,根据CMakeLists.txt生成本地化的Makefile和工程文件。
CMake具体实践过程
- 编写CMake配置文件CMakeLists.txt
- 在CMakeLists.txt所在目录下创建build文件夹,
mkdir build,即build和CMakeLists.txt在同一文件目录 下。 - 执行cmake :
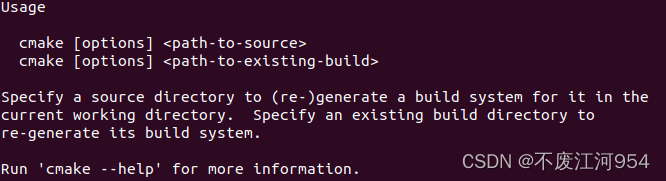
cmake PATH。其中PATH是CMakeLists.txt所在目录,例如,当前目录就是CMakeLists.txt所在目录,则可输入命令:cmake .。cmake具体用法可参照下图:
make -j4,其中-j是指定CPU核心数,-j4表明分配4个CPU核心来进行编译。- 生成的可执行文件在
build/devel/lib/<project_name>下。
CMakeLists.txt编写快速入门
常见函数
- message()
例子
- OpenGL:Open Graphics Library的缩写,跨语言 、跨平台的图形程序接口,提供2D、3D图形渲染接口,操作在GPU之上,实现硬件加速渲染。
- QGLViewer:基于Qt的开源C++库,为了OpenGL的3D开发更加容易。
- PCL:Point Cloud Library
## Copyright (C) 2020 I. Bogoslavskyi, C. Stachniss
##
## Permission is hereby granted, free of charge, to any person obtaining a
## copy of this software and associated documentation files (the "Software"),
## to deal in the Software without restriction, including without limitation
## the rights to use, copy, modify, merge, publish, distribute, sublicense,
## and/or sell copies of the Software, and to permit persons to whom the
## Software is furnished to do so, subject to the following conditions:
##
## The above copyright notice and this permission notice shall be included in
## all copies or substantial portions of the Software.
##
## THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
## IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
## FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
## AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
## LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING
## FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER
## DEALINGS IN THE SOFTWARE.cmake_minimum_required(VERSION 3.1) # 对cmake的最低版本要求,== CMAKE_MINIMUM_REQUIRED(VERSION 3.1)
project(depth_clustering) # 设置项目名称,== set(PROJECT_NAME depth_clustering)include(DistVersion.cmake)
system_info(DISTRO)
message(STATUS "DISTRO: ${DISTRO}")set(CMAKE_CXX_STANDARD 11)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
set(CMAKE_CXX_EXTENSIONS OFF)if(NOT CMAKE_BUILD_TYPE)set(CMAKE_BUILD_TYPE Release)
endif()set(CMAKE_CXX_FLAGS "-Wall -Wextra -fPIC")
set(CMAKE_CXX_FLAGS_DEBUG "-g -O0")
set(CMAKE_CXX_FLAGS_RELEASE "-O3")cmake_policy(SET CMP0045 OLD)SET(CMAKE_MODULE_PATH${CMAKE_MODULE_PATH}"${PROJECT_SOURCE_DIR}/cmake_modules""/usr/share/cmake-2.8/Modules" ## Hack for travis)set(CMAKE_ARCHIVE_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/lib)
set(CMAKE_LIBRARY_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/lib)
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/bin)include(CTest)
IF(IS_DIRECTORY "/usr/src/gtest/")MESSAGE(STATUS "Found google test sources in /usr/src/gtest/")ADD_SUBDIRECTORY(/usr/src/gtest/ gtest)# mimick the behaviour of find_package(GTest)SET(GTEST_FOUND TRUE)SET(GTEST_BOTH_LIBRARIES gtest gtest_main)SET(GTEST_LIBRARIES gtest)SET(GTEST_MAIN_LIBRARIES gtest_main)
ELSE()find_package(GTest)
ENDIF()set(Boost_USE_STATIC_LIBS OFF)option(BUILD_WITH_COVERAGE "Enable compilation with coverage information." OFF)
if(BUILD_WITH_COVERAGE)message(STATUS "Enabled generation of code coverage information with gcc.")set(CMAKE_CXX_FLAGS "-fprofile-arcs -ftest-coverage ${CMAKE_CXX_FLAGS}")
endif()find_package(Threads REQUIRED)
find_package(Eigen3 REQUIRED)
find_package(OpenCV REQUIRED)
find_package(OpenGL REQUIRED)
find_package(Boost REQUIRED COMPONENTS system filesystem regex program_options)
find_package(PCL QUIET COMPONENTS common io)
find_package(QGLViewer REQUIRED)# find correct qt version
if(${DISTRO} MATCHES "14.04")find_package(Qt4 REQUIRED COMPONENTS QtCore QtXml QtOpenGL QtGui QtMultimedia)include(${QT_USE_FILE})include_directories(${QT_INCLUDES})set(MY_QT_LIBRARIESQt4::QtCoreQt4::QtXmlQt4::QtOpenGLQt4::QtGui)
elseif(${DISTRO} MATCHES "16.04" OR ${DISTRO} MATCHES "18.04")find_package(Qt5 REQUIRED COMPONENTS Core Xml OpenGL Gui Widgets)include_directories(${Qt5Core_INCLUDE_DIRS}${Qt5Xml_INCLUDE_DIRS}${Qt5Gui_INCLUDE_DIRS}${Qt5Widgets_INCLUDE_DIRS}${Qt5OpenGL_INCLUDE_DIRS})set(MY_QT_LIBRARIES${Qt5Widgets_LIBRARIES}${Qt5Core_LIBRARIES}${Qt5Gui_LIBRARIES}${Qt5Xml_LIBRARIES}${Qt5OpenGL_LIBRARIES})
endif()# some status messages
message(STATUS "Linking against Qt libs: ${MY_QT_LIBRARIES}")
message(STATUS "Linking against QGlViewer lib: ${QGLVIEWER_LIBRARY}")## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin COMPONENTSroscppsensor_msgsstd_msgsnav_msgsmessage_filterstfeigen_conversions
)# add some useful constants to configuration
configure_file(config/cmake_config.h.in${PROJECT_SOURCE_DIR}/config/cmake_config.h)
include_directories(config)if (${PCL_FOUND})message(STATUS "PCL is found. PCL-related code will be built.")if (${CMAKE_BUILD_TYPE} MATCHES "Debug" AND ${DISTRO} MATCHES "14.04")message(FATAL_ERROR"!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!\n""You are building PCL in Debug mode with C++11 enabled.\n""This causes segmentation fault due to a bug in PCL.\n""Build in Release mode to avoid this bug.\n""!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!")endif()add_definitions(-DPCL_FOUND)
else()message(WARNING "PCL NOT FOUND! PCL-related code WILL NOT be built")
endif()if(${roscpp_FOUND})message(STATUS "ROS found, building ROS related parts")set(ROS_FOUND YES)
else()message(WARNING "ROS NOT FOUND. NOT building ROS related parts!")set(ROS_FOUND NO)
endif()catkin_package(INCLUDE_DIRS srcLIBRARIEScloudidentifiableground_removedifferenceimage_labelerprojectionsros_bridgevelodyne_utilsfolder_readervisualizationCATKIN_DEPENDS roscpp sensor_msgs std_msgs nav_msgs message_filters tf
)# 加载头文件
include_directories(src# for QT moc files${PROJECT_BINARY_DIR}/src# dependencies we have no control overSYSTEM ${EIGEN3_INCLUDE_DIR}SYSTEM ${Boost_INCLUDE_DIRS}SYSTEM ${PCL_INCLUDE_DIRS}SYSTEM ${OpenCV_INCLUDE_DIRS}SYSTEM ${OpenGL_INCLUDE_DIRS}SYSTEM ${QGLVIEWER_INCLUDE_DIR}SYSTEM ${catkin_INCLUDE_DIRS}
)add_subdirectory(src)
add_subdirectory(examples)message(STATUS "BUILD_TESTING: ${BUILD_TESTING}")
if (${BUILD_TESTING})add_subdirectory(test)
endif()
未完待续