相关文章
常见的bug---4、在DataGrip上跑本地模式报return 2异常
文章目录 问题描述原因分析:解决方案: 问题描述
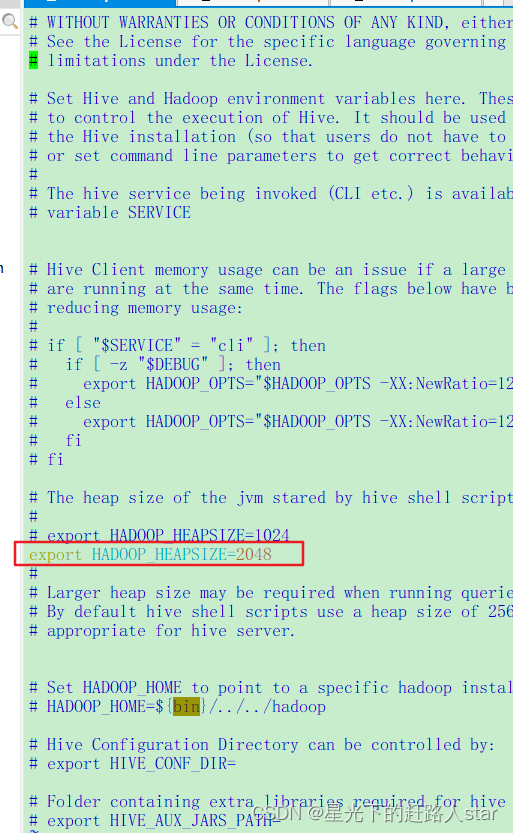
FAILED: Execution Error, return code 2 from org.apache.hadoop.hive.ql.exec.mr.MapRedTask 在DataGrip上设置了Hive的本地模式。虽然可以建表、但是无法对表进行插入数据
原因分析:
在插…

大脚战场插件怎么关闭_大脚插件过期进不去战场 大脚插件评级战场敌对框架...
WOW一用大脚插件就进不去怎么回事禁用插件就可以进? 与过期插件冲突,报告错误。。。选择wow文件目录中的扳手图标重置所有插件。最好重新安装大脚。。。 PS:大脚不好用,建筑大师用魔盒,那很好用。而且几乎没有什么问题…
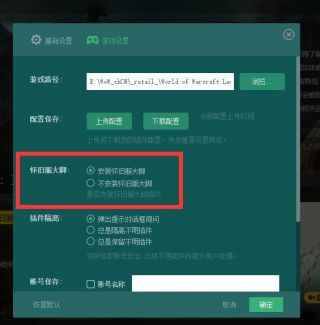
怀旧服大脚插件未能从服务器,《魔兽世界怀旧服》大脚插件 安装方法使用教程...
玩魔兽世界的人,基本都人手配一个大脚插件,还是非常好用的,插件也让魔兽世界变得更轻松一点,昨天,大脚官方也进行了怀旧服的插件更新,大脚插件也有怀旧服版本,就是选插件的时候调整一下就可以了…
【疯壳·智能机器人教程4】人形街舞机器人-PC 上位机在线调试
多自由度人形双足舞蹈机器人 ——疯壳机器人开发系列 PC 上位机在线调试 首先在我们提供的文件中找到上位机调试软件 robotCtrl,双击打开,界面如下。 图 1 界面中的舵机图标如同一个人形,人形中的每一个舵机与我们机器人身上的…
电动打气泵方案开发--鼎盛合PCBA方案
开车的每一个司机都必须要知道一个事情——定期检查轮胎气压是否正常,因为轮胎胎压不足会导致轮胎过早磨损,从而造成容易发生道路交通事故,并且对汽车的操控性和牵引力带来不良影响,甚至会出现爆胎或汽车失控等极其危险的事故。 电…

波士顿动力的机器人会开门了,中国还要奋力追赶
去年的时候,俄罗斯 Promobot 公司的机器人因为屡次逃跑而成为网红,并受到了现任俄罗斯总统普京的接见。 但是,很多人质疑这只是一场炒作,毕竟公司的大门没关,机器人不小心溜出来并不困难。 不过,现在有家公…

新定位人工智能+营销服务 沃丰科技入选国家级专精特新“小巨人”
8月9日,北京市经济和信息化局公示了第四批国家级专精特新“小巨人”企业名单,沃丰科技榜上有名。沃丰科技副总裁傅亮在接受科技日报记者专访时表示,沃丰科技成立8年来,一直专注于人工智能与营销服务领域,业绩突飞猛进&…