多自由度人形双足舞蹈机器人
——疯壳·机器人开发系列
PC 上位机在线调试
首先在我们提供的文件中找到上位机调试软件 robotCtrl,双击打开,界面如下。

图 1
界面中的舵机图标如同一个人形,人形中的每一个舵机与我们机器人身上的舵机一一对应。

图 2
每一个舵机控制窗口之中有两个值:B、P。进度条 P 可以随意拖动,P 表示舵机位置(默认为中位 1500)范围为 500-2500,B 表示舵机偏差(默认为 0),即舵机的相对位置,范围为-100~ +100,导入动作组中的是绝对位置 P0=B+P。

图 3 图 4
这里的 B 通过双击 B 开启,再双击 B 关闭调节。如果 B=20 P=1500,实际舵机发送 P1520,用于修复舵机偏差。每个舵机都有自己的一个舵机偏差B,等调好 B 之后可保存,用打开按钮可重新导入偏差。
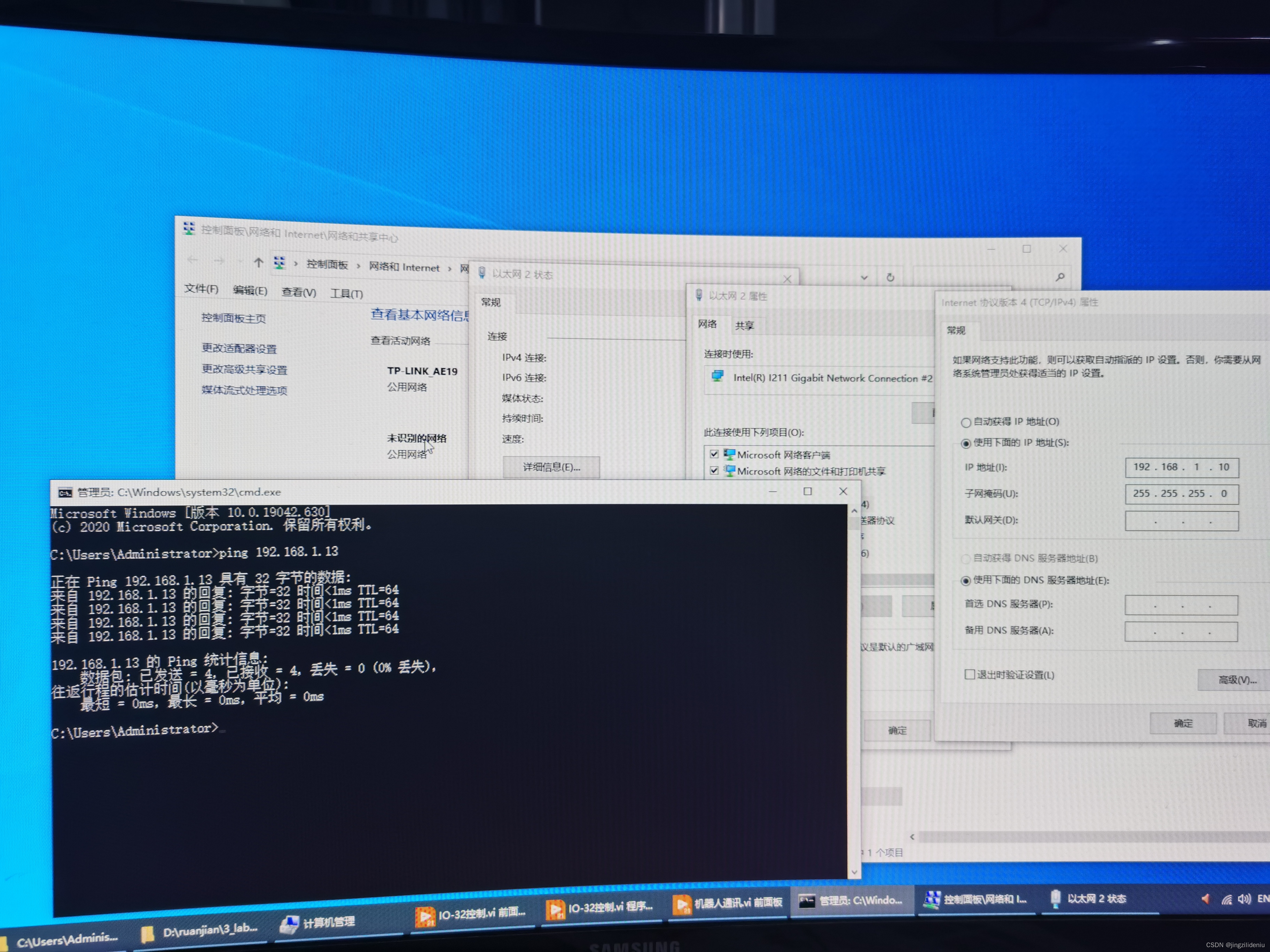
我们插上机器人的 USB 接口,首先点击连接管理窗口的刷新按键,然后选择最新出来的 COM 口,并单击打开。有一点要注意的是连接管理窗口中的波特率采用的 9600。

图 5
连接完成之后,先点击调试管理中的实时调试,我们就可以左右拖动每个舵机控制窗户中的进度条,从而控制相对应的舵机的角度。这个时候,相对应的舵机也会跟着左右转动。
我们将机器人的头部舵机控制窗口中的进度条拖到最左边,然后点击动作管理中的添加动作。完成之后,将 13 号舵机控制窗口中的进度条拖到最右边,然后点击动作管理中的添加动作。下面的动作数据框就会出现两行动作数据。

图 6
我们选中循环,点击在线运行之后,就能重复运行这两个动作。与之相对应的现象就是机器人在做左右摇头动作。
图 7
完成上述简单动作的调试后,我们可以将上面所创造的动作下载下来。先点击下载管理中的擦除,然后点击下载,将动作组数据下载到外部 Flash 当中。
图 8
完成下载之后,就可以进行脱机运行动作了。最后补充几个其他功能,大家自己可以试用。
(1)连接管理窗口中的发送区和接收区,其实也就是一个串口调试工具的发送接收框,可发送接收数据。
(2)动作管理框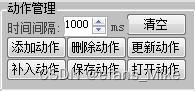
图 9
时间间隔:一个动作完成的时间。添加动作:新增一个动作。
删除动作:删除选中的动作。
更行动作:就是修改并替换以前的动作。
补入动作:就是在动作之间新建一个新的动作。保存动作:将当前动作组保存成文件。
打开动作:打开动作文件,载入动作文件中的动作。
(3)基本操作框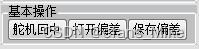
图 10
舵机回中:将所有舵机的 P 值调整到 1500。
打开偏差:载入偏差文件,修改所有舵机控制框中的 B 值。
保存偏差:将所有舵机控制框中的 B 值保存成为文件存储下来。