一、准备工作
- 准备一台电脑:
- 无具体要求,家用即可,Windows系统
二、开始下载
-
下载官方提供镜像
- 下载地址(百度云):https://pan.baidu.com/s/1T0Tcl3y48C1p5L6y-6HJNg 提取码:eusr
-
下载HiBurn
- 下载地址(百度云):https://pan.baidu.com/s/1bp2ypAfH2HaNPTY2KwEhEA 提取码:1234
-
下载并安装虚拟机VMware Workstation
- 下载地址:https://www.vmware.com/products/workstation-player/workstation-player-evaluation.html
-
下载并安装MobaXterm工具
- 下载地址:https://en.softonic.com/download/moba/windows/post-download
-
下载并安装RaiDrive工具
- 下载地址:https://forspeed.rbread05.cn/down/newdown/5/28/RaiDrive.rar
-
下载并安装开发板USB驱动
- 下载地址:http://www.wch.cn/search?q=ch340g&t=downloads
-
下载并安装VS Code
- 下载地址:https://code.visualstudio.com
三、开始部署环境
-
解压百度云下载的HarmonyOS
Ubuntu18.4镜像OVF.zip文件到某个目录。
-
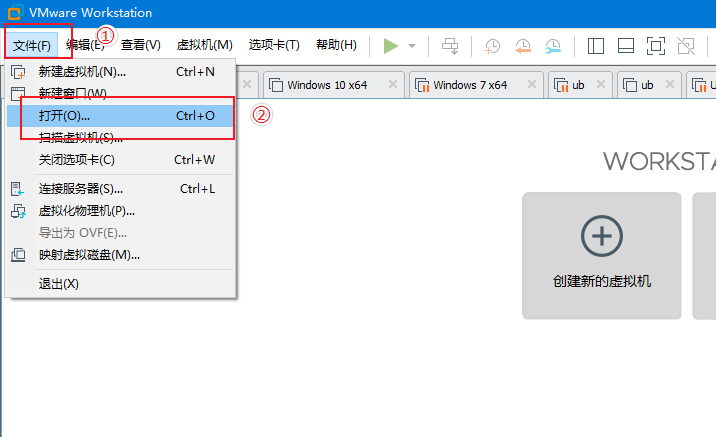
打开VMware Workstation工具
-
选择第1步解压的
Ubuntu18.4镜像OVF文件夹中,点击打开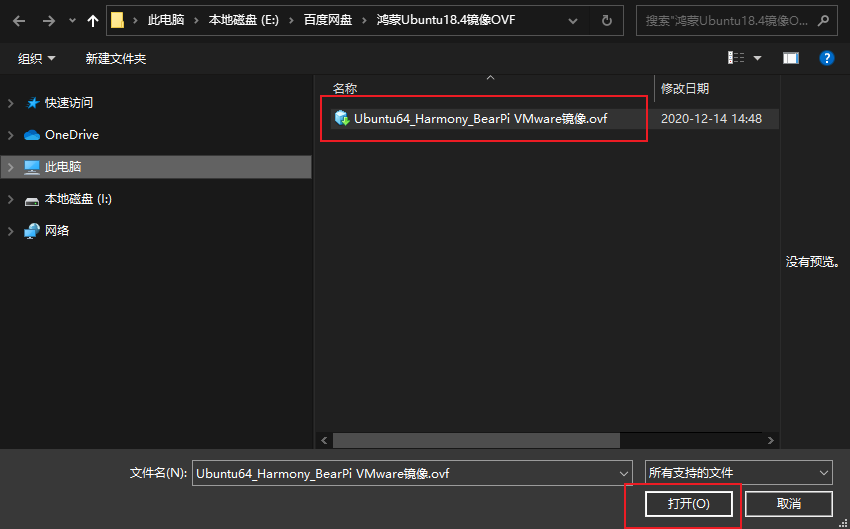
-
导入镜像到本地磁盘(选择一个磁盘空间大小≥ 10G的盘),点击
导入。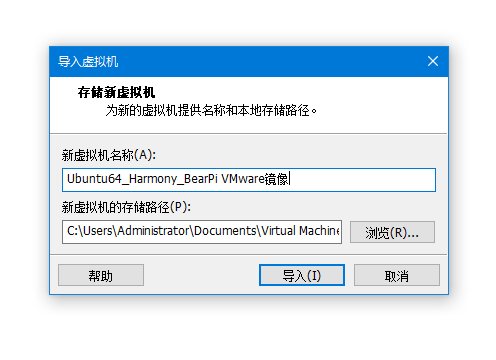
-
点击
开启此虚拟机,来开启虚拟机电源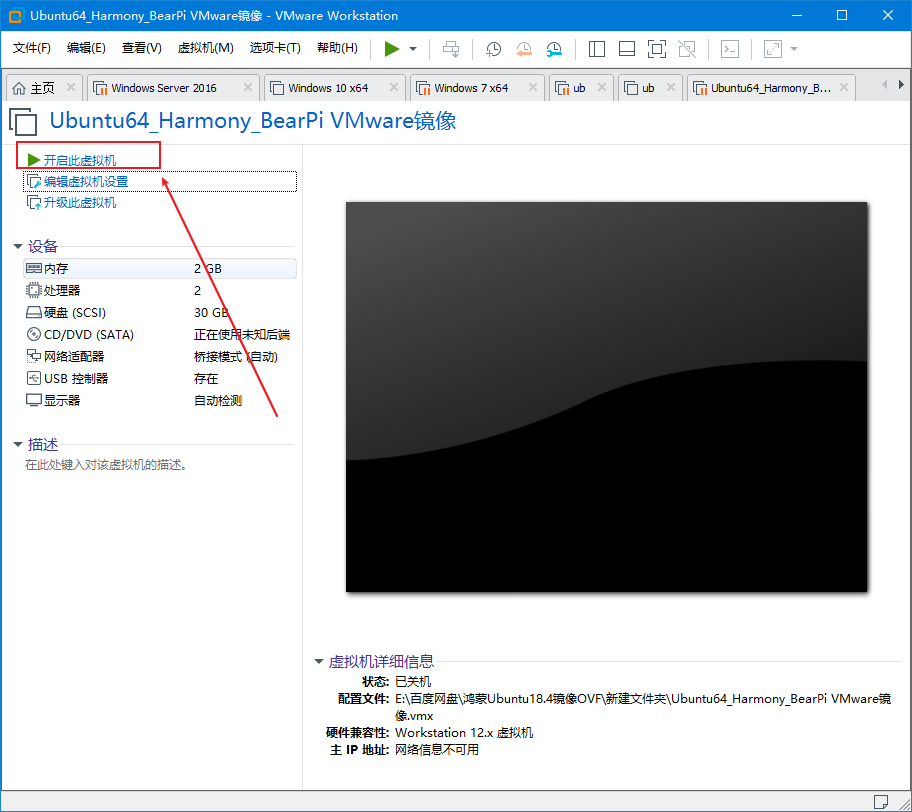
-
此时虚拟机进入登录界面,点击
HarmonyOS
-
输入密码:bearpi,然后点击
登录
-
进入桌面后,点击桌面空白处
右键,点击打开终端(E)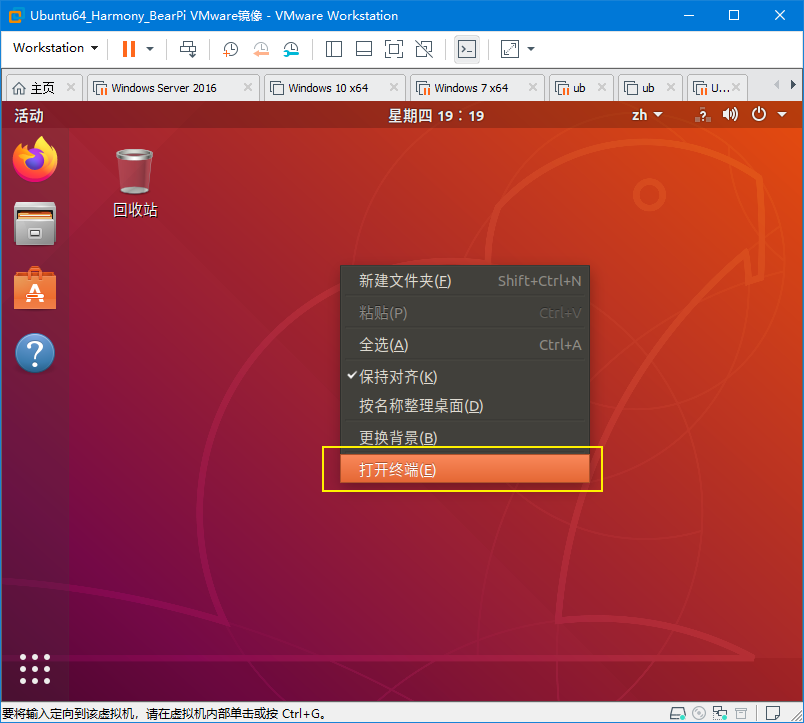
-
在终端中输入
ifconfig,然后点击回车,除lo外,另外一个就是你的网卡信息,记录你获取到的IP地址。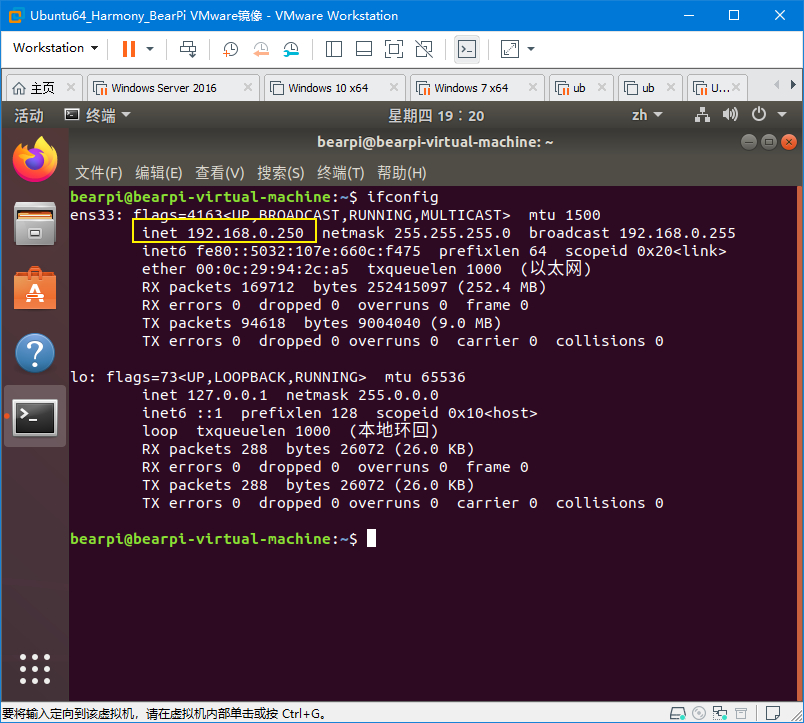
-
最小化VMware Workstation,回到Windows桌面上。
-
附加:如果连不上网络(如果主机网络需要拨号,如
校园网络、ADSL拨号等)在VMware Workstation中,点击
虚拟机>>设置
然后在网络适配器中,改成
NAT 模式,点击确定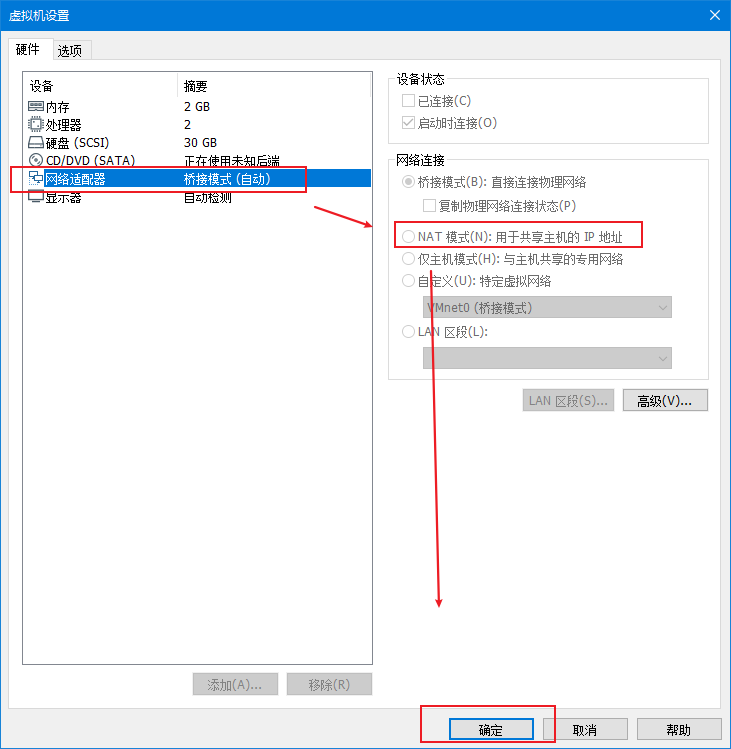
然后再回复
步骤8。
四、在Windows上远程连接服务器
-
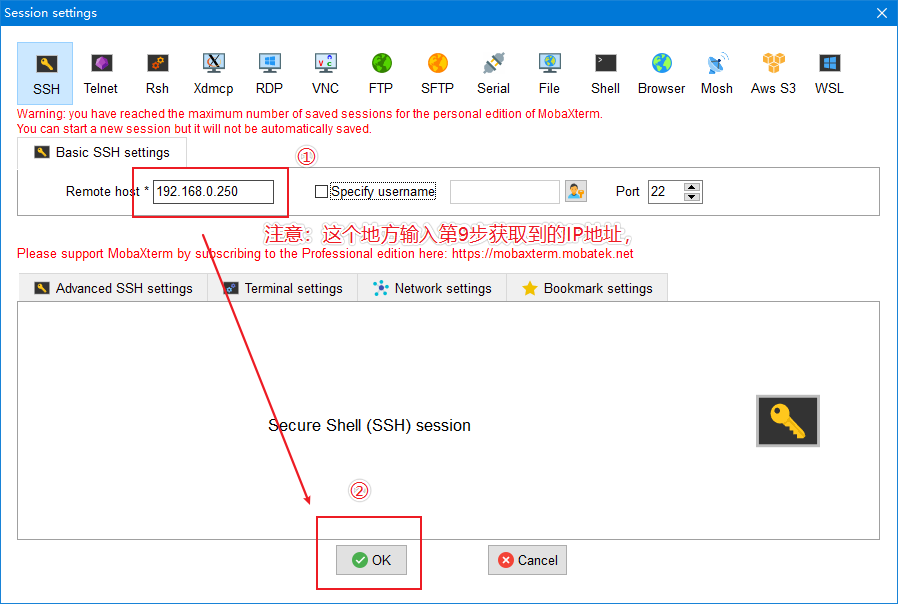
打开
MobaXterm工具,并依次点击:Session,SSH按钮。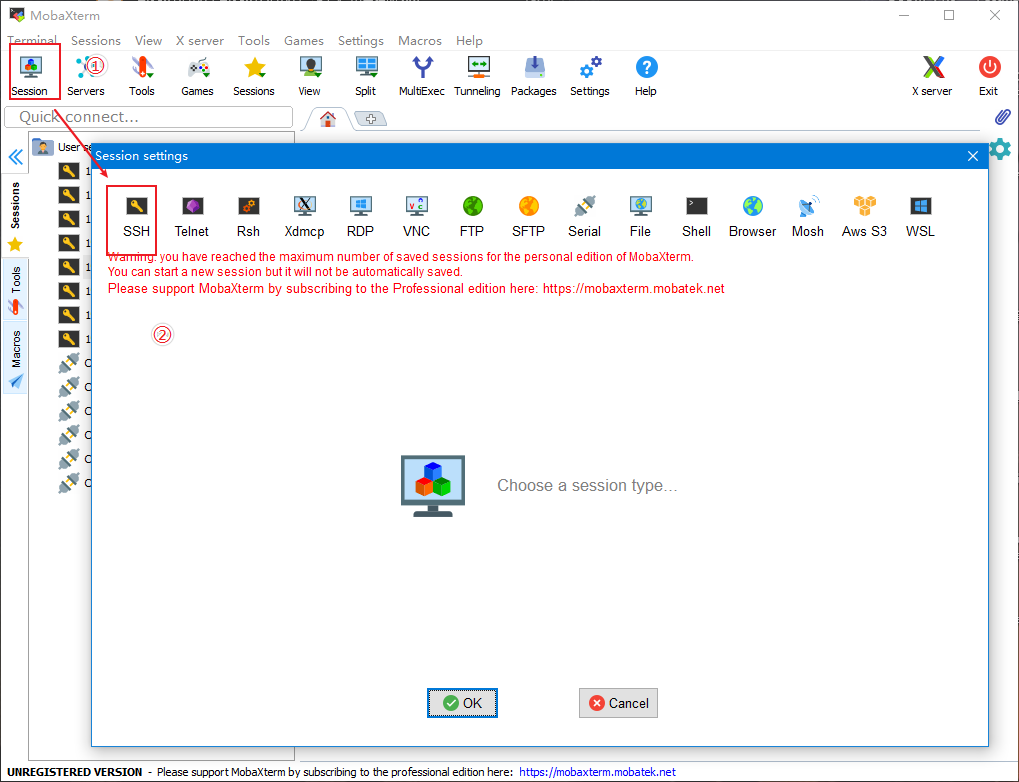
-
输入连接信息,远程地址,并点击OK
-
输入账号:
bearpi,点击回车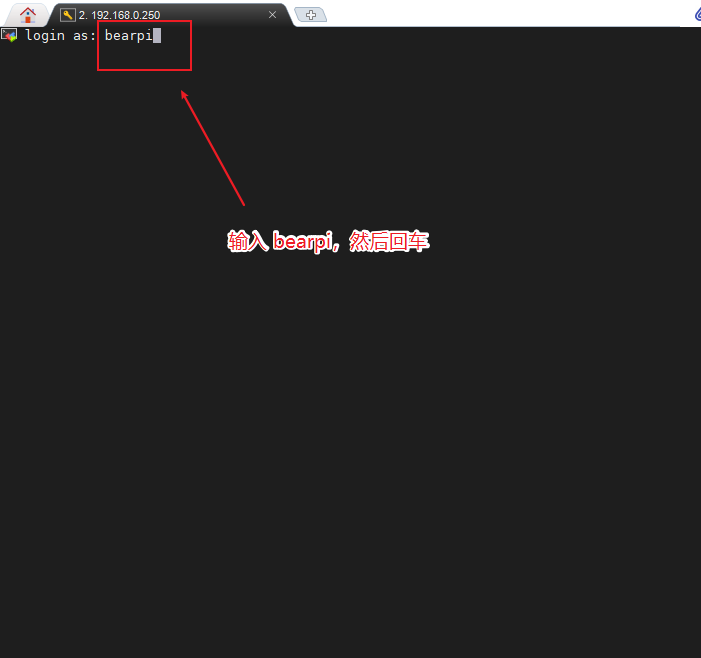
-
输入密码:
bearpi,注意,输入密码的时候屏幕不会显示,输完之后点击回车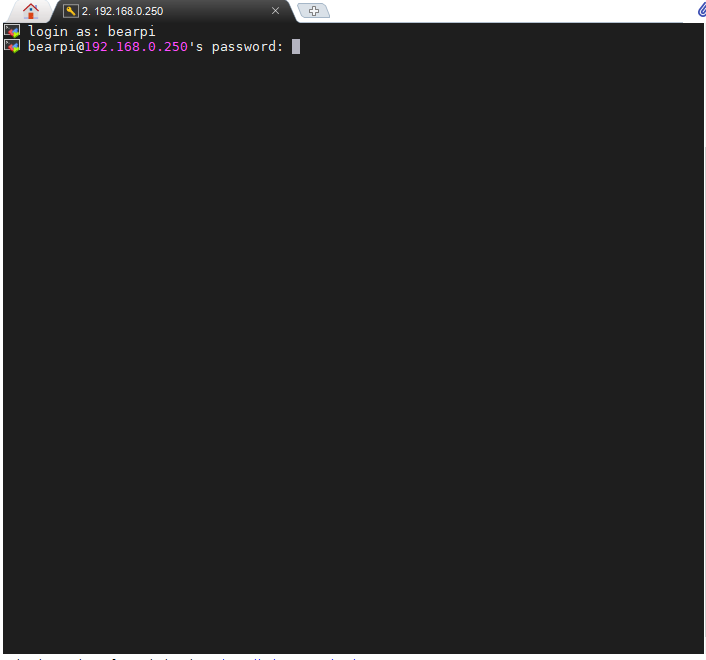
-
在弹出的界面上,点击
Yes保存账号信息,以免下次输入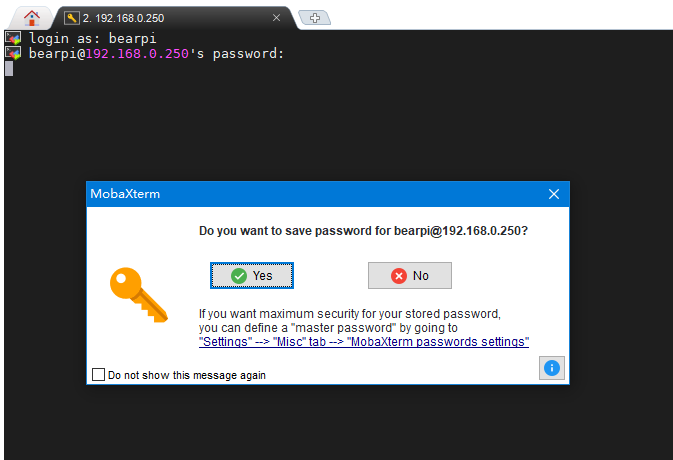
五、把ubuntu文件远程映射到Windows上
-
安装RaiDrive软件
默认安装即可。
-
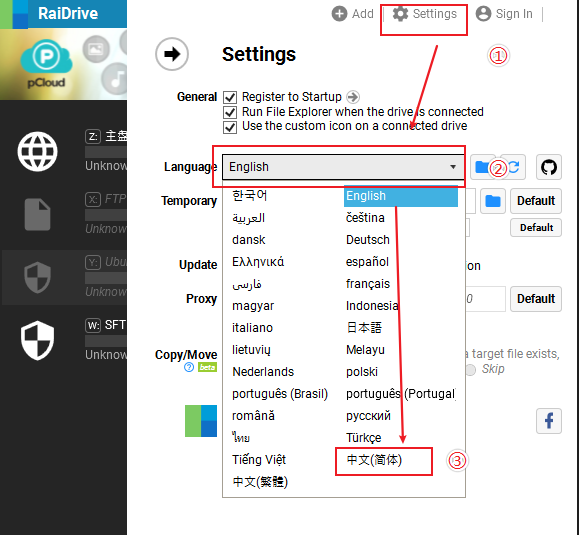
切换为中文语言
-
添加链接信息
- 取消勾选只读
- SFTP://______ (这个输入 三.9 获取到的地址)
- 账户:账号和密码皆为 bearpi
- 其他默认
- 点击
确定

-
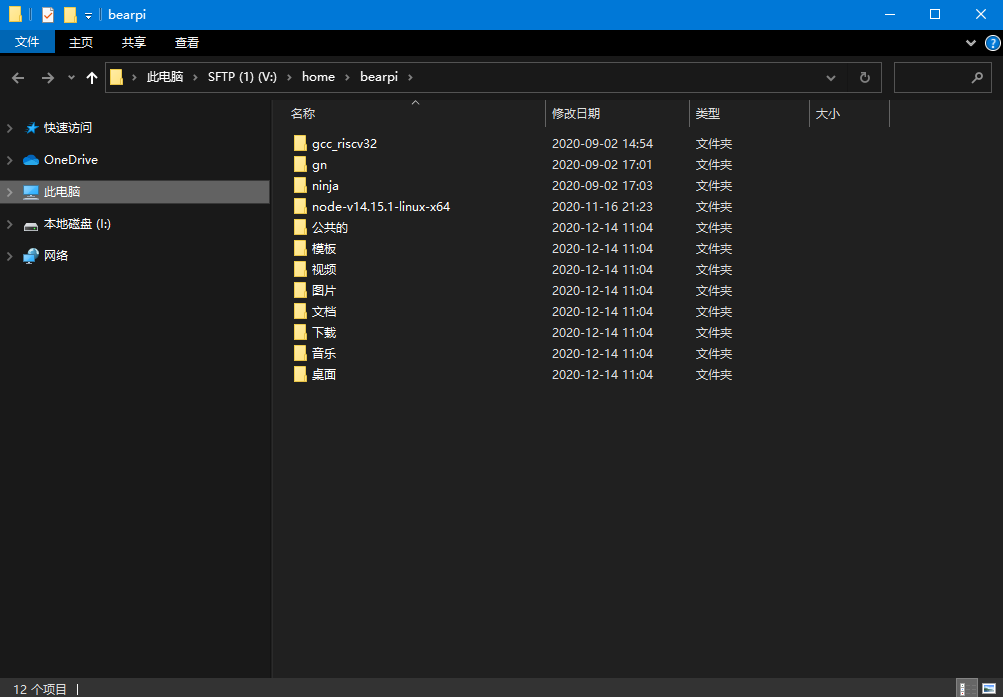
查看本地映射的ubuntu文件路径
六、在ubuntu获取源码
-
鼠标焦点移到MobaXterm
-
在MobaXterm中输入:
cd /home/bearpi
然后回车
-
在MobaXterm中输入:
mkdir project && cd project
然后回车
-
在MobaXterm中输入:
hpm init -t default
然后回车
-
在MobaXterm中输入:
hpm i @bearpi/bearpi_hm_nano
然后回车,等待1-3分钟(根据不同网速)
注: 若执行失败请参考
第三-11解决网络问题,并通过ping外网确认ubuntu网络正常。 -
当屏幕中出现
Installed.意味着代码获取完成
七、编译代码
-
在MobaXterm中输入:
hpm dist
然后回车,等待直到屏幕出现:
BUILD SUCCESS字样,说明编译成功。 -
查看编译出的固件位置
当编译完后,在Windows中可以直接查看到最终编译的固件,具体路径在:
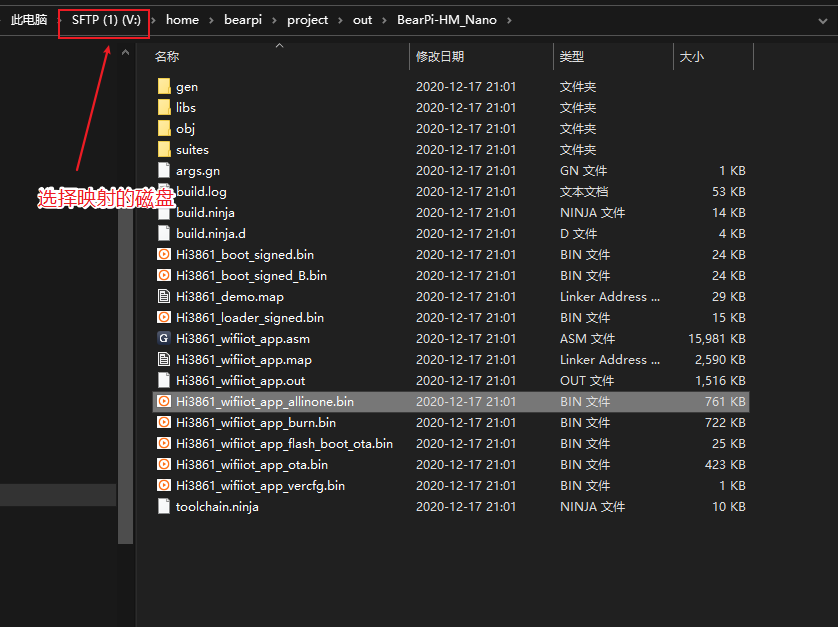
*注意,最前的磁盘在为
RaiDrive映射的路径。
八、连接开发板
-
通过TypeC数据线,把电脑与BearPi-HM Nano连接。
-
安装CH340驱动。
下载地址:http://www.wch.cn/search?q=ch340g&t=downloads
-
关闭虚拟机捕获USB功能。(有很多开发者都是因为虚拟机捕获了USB设备,导致本机Windows电脑看不到串口)
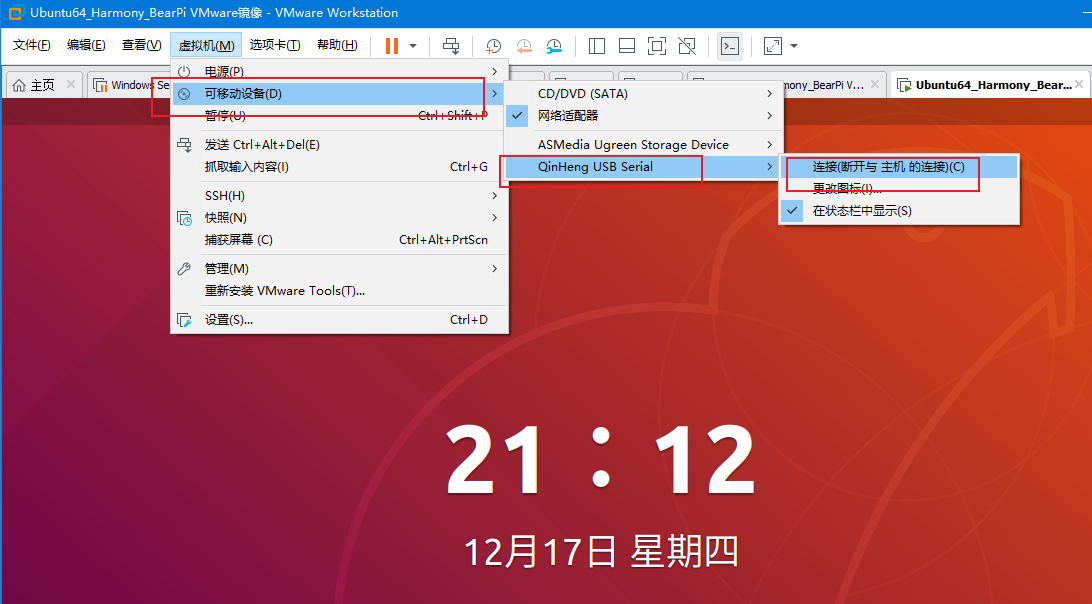
如果上面操作不行,直接关闭VMware Workstation,选择挂起,然后再重新插拔USB。
-
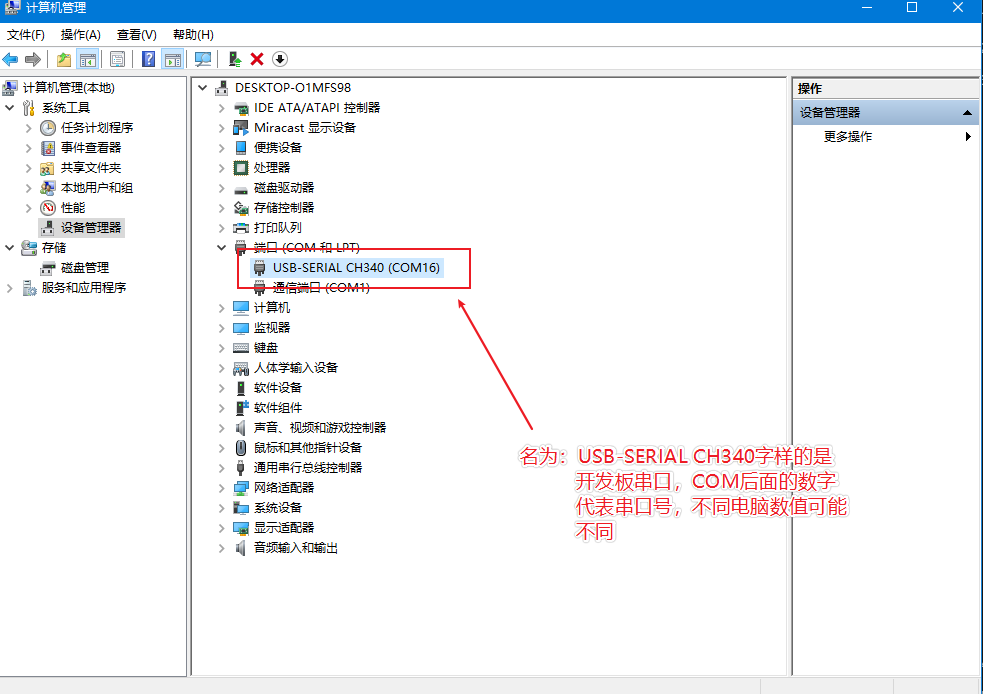
查看开发板的串口
九、下载程序
-
在Windows打开Hiburn工具,并点击
Refresh,在COM中选择第八-4看到的COM号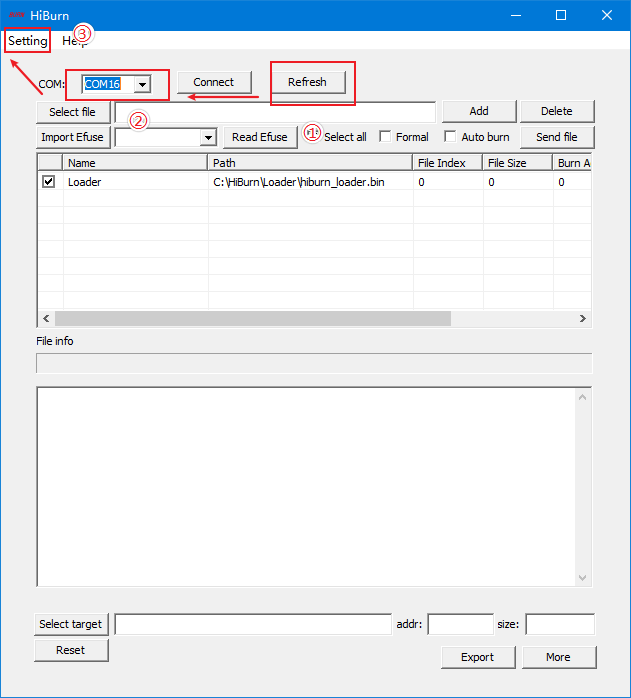
然后点击
Setting,并选择Com settings, -
在Com settings中设置
Baud为:921600,点击确定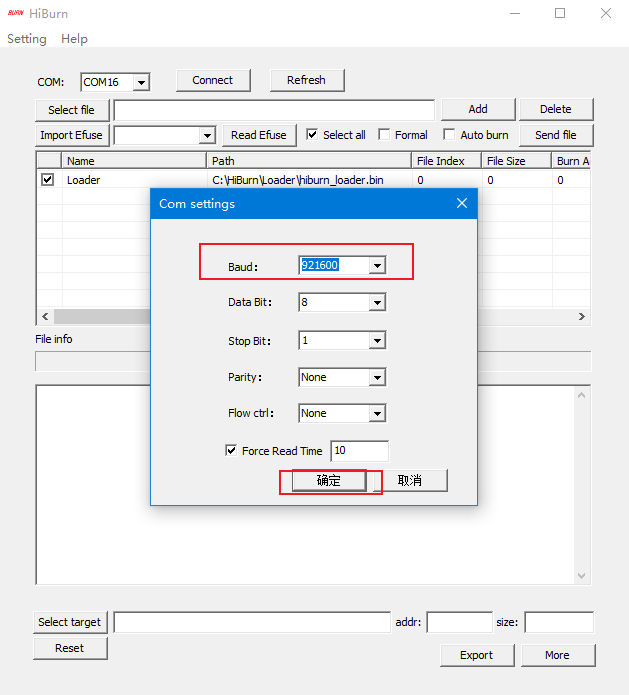
-
点击 Hiburn工具中的
Select file按钮,在弹出的文件框中,选择七-2中对应的路径,并选中:Hi3861_wifiiot_app_allinone.bin文件。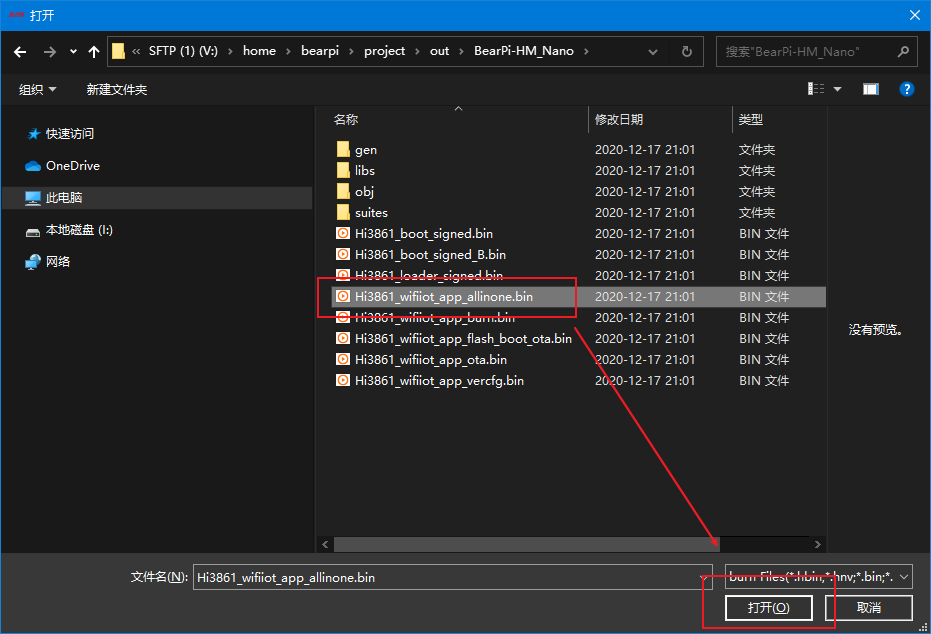
-
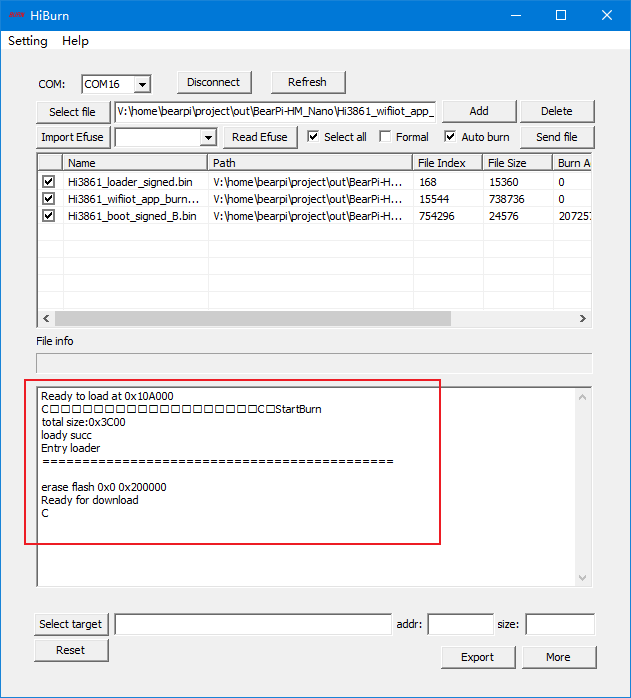
点击
Auto burn复选框,然后点击Connect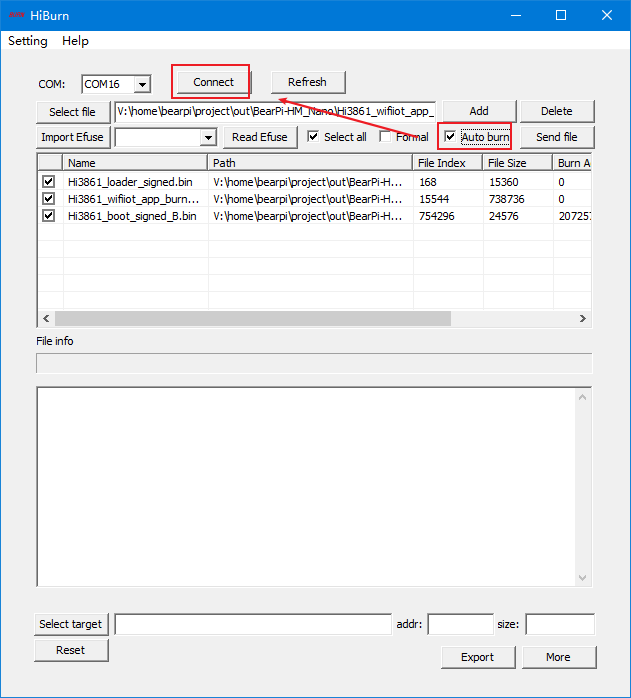
此时
Connect按钮变成Disconnect,等待下载 -
复位开发板
RESET按键,开始下载程序
-
直到出现
Execution Successful字样,程序下载完成。 -
下载完后,点击
Disconnect按钮,便于后面调测使用。
十、MobaXterm 查看串口打印日志
-
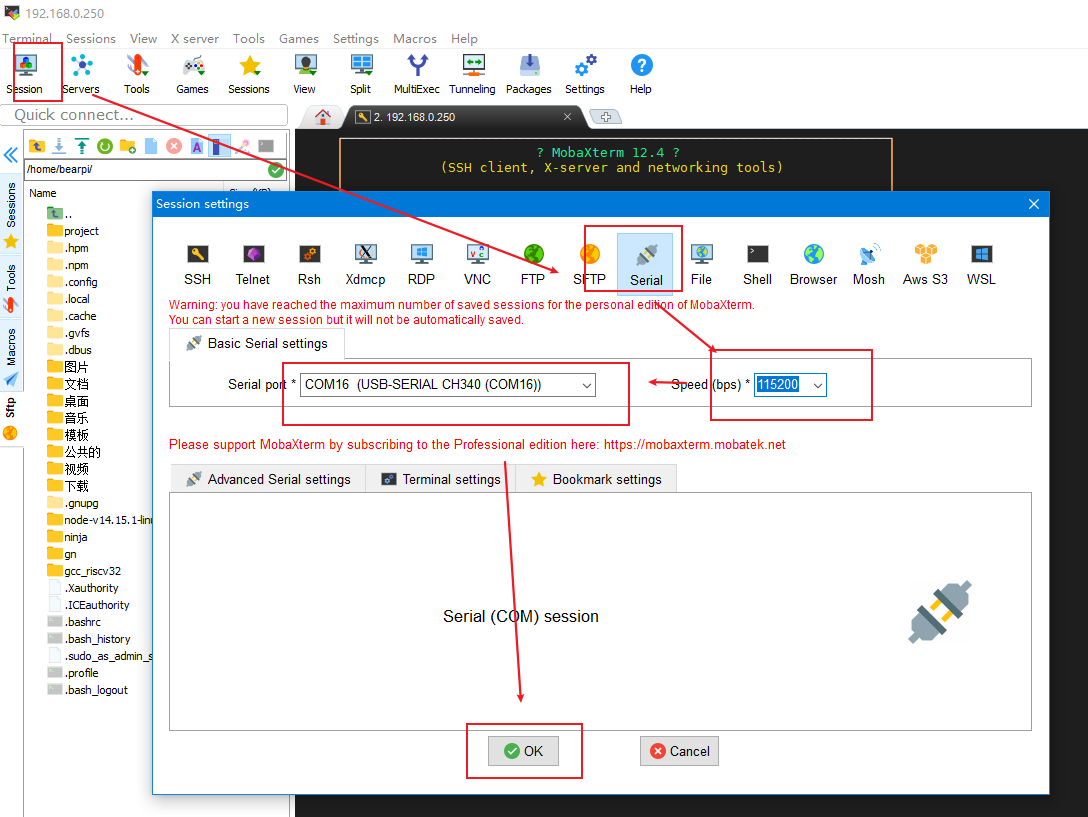
打开MobaXterm,
-
点击:
Session、Serial按钮 -
设置Seral port为 Hiburn 同一个串口
-
设置Speed为
115200 -
点击
OK
-
-
如果显示Unable to open...等字样,需要看一下Hiburn的链接状态是否为关闭(九-7)步骤。
-
复位开发板,此时COM打印出对应日志信息
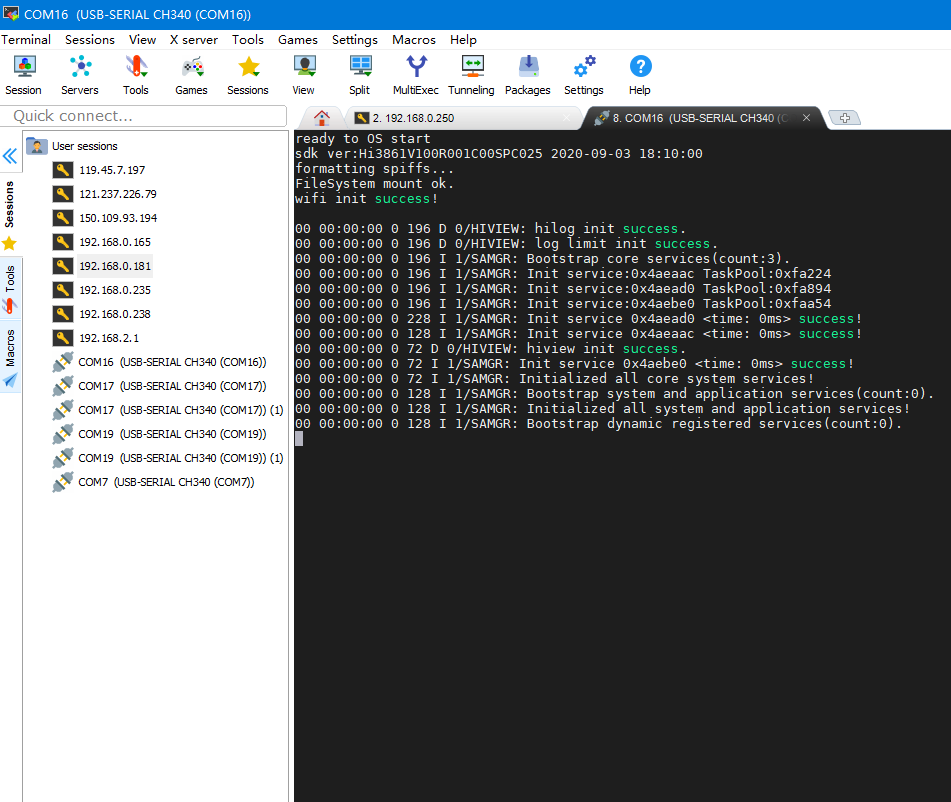
(本内容转载自小熊派开源社区)