本文我们将会了解 Service 通讯原理和机制,通过编写 Server 端和 Client 端实现 Service 通讯,并通过命令行工具或者图形化工具进行调试。最后再介绍几个常用的 rosservice 命令。
Service 通讯架构
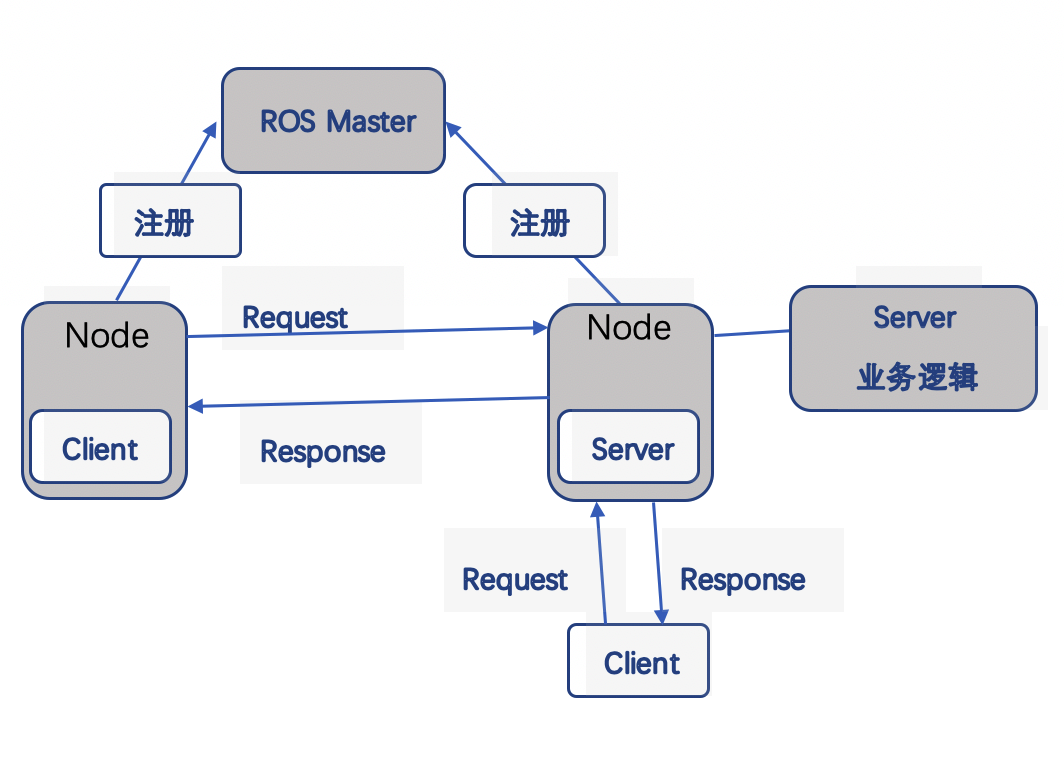
ROS 还提供了节点与节点间通讯的另外一种方式:Service 通讯。
Service 通讯分为 client 端和 server 端。
- client 端负责发送请求(Request)给 server 端。
- server 端负责接收 client 端发送的请求数据。
- server 端收到数据后,根据请求数据和当前的业务需求产生数据,将数据(Response)返回给 client 端。
Service 通讯特点:
- 同步数据访问。
- 具有响应反馈机制。
- 一个 server 处理多个 client 的请求。
- 注重业务逻辑处理。
Service 通讯的关键点:
- service 的地址名称。
- client 端访问 server 端的数据格式。
- server 端响应 client 端的数据格式。
Server 创建流程
构建一个 Service 通讯,需要的是一个 client 端和一个 server 端。server 端为 client 端提供服务,帮助 client 端进行加法的求和计算。
首先初始化一个工作空间:
mkdir -p /home/shiyanlou/ws/src
cd /home/shiyanlou/ws
# 对工作空间进行编译
catkin_make
进入 ws/src 目录下,执行如下命令创建名为 demopy 的 Package 以及包下面的 scripts 文件夹:
cd /home/shiyanlou/ws/src
catkin_create_pkg demopy roscpp rospy rosmsg
mkdir /home/shiyanlou/ws/src/demopy/scripts
在 demopy/scripts 目录新建一个 server_node.py 文件,并赋予该文件可执行权限:
chmod +x /home/shiyanlou/ws/src/demopy/scripts/server_node.py
- 创建节点。
rospy.init_node(nodeName)
- 创建 server。
rospy.Service(serviceName, AddTwoInts, callback)
serviceName参数为服务名称,是一个 uri 地址。AddTwoInts参数是服务需要的数据类型,这里使用的是 ros 提供的数据类型。callback参数为服务请求的回调。
- 处理请求的逻辑。
回调函数的参数是请求过来的数据,返回值是响应的数据。
def callback(request):if not isinstance(request, AddTwoIntsRequest):return# 获取请求数据a = request.ab = request.b# 返回响应结果response = AddTwoIntsResponse()response.sum = a + breturn response
- 完整示例代码。
#! /usr/bin/env python
# coding:utf-8
"""
client: 10 20
server: 10 + 20
"""import rospy
from rospy_tutorials.srv import AddTwoInts, AddTwoIntsRequest, AddTwoIntsResponsedef callback(request):if not isinstance(request, AddTwoIntsRequest): return# 获取请求数据a = request.ab = request.b# 业务逻辑处理,返回响应结果c = a + bresponse = AddTwoIntsResponse()response.sum = creturn responseif __name__ == '__main__':# 创建节点rospy.init_node('server_node')# service 通讯的服务端 server# 服务端 server# 服务地址 /a/b/c/dservice_name = '/shiyan/my_server'server = rospy.Service(service_name, AddTwoInts, callback)rospy.spin()
调试 Server
调试 server 端主要就是查看 server 端是否能正常接收到请求,并根据请求数据处理对应的业务逻辑,然后再返回处理好的结果到客户端。运行刚才编写的 server 端,只需要再模拟一个 client 端发送请求,就可以进行调试了。
# 新开一个终端,启动 ROS Master
roscore
# 切换到工作空间目录下
cd /home/shiyanlou/ws
# 使用 catkin_make 编译项目
catkin_make
# source 开发环境
source devel/setup.zsh
# 运行编译
rosrun demopy server_node.py
ROS 提供了命令行工具和图形化工具供我们调试开发。
- rosservice 命令行调试。
通过 rosservice list 命令可以查询出当前运行的所有 service。查询的结果中,可以看到我们定义的服务名称 /shiyan/my_server。

然后去调用此服务,会返回相加后的数据。
source devel/setup.zsh
# 注意这个命令的输入需要技巧,先输入 rosservice call /shiyan/my_server,然后按 tab 键它会自动补全,最后再修改 a 和 b 的值
rosservice call /shiyan/my_server "a: 30 b: 3"

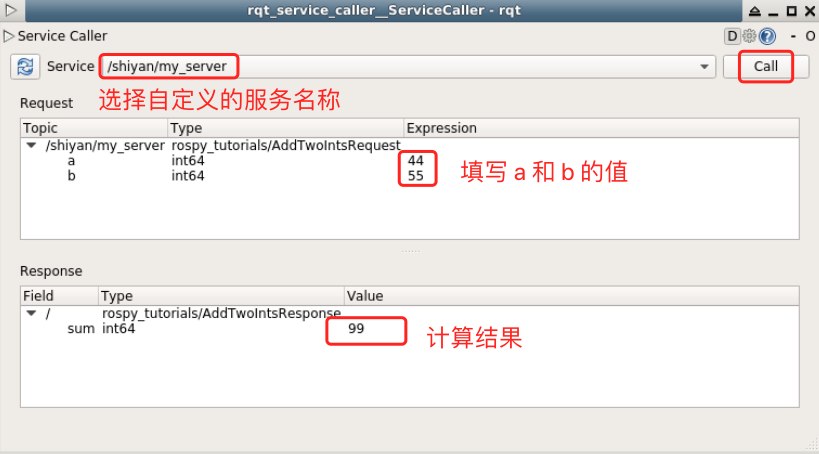
- rqt_service_caller 工具调试。
rosrun rqt_service_caller rqt_service_caller
打开调试工具,找到自定义的服务名称 /shiyan/my_server,在下面的 Request 区域中,填写 a 和 b 的值,然后点击 Call,计算的结果会显示在 Response 区域中。
Client 创建流程
在 demopy/scripts 目录新建一个 client_node.py 文件,并赋予该文件可执行权限:
chmod +x /home/shiyanlou/ws/src/demopy/scripts/client_node.py
- 创建节点。
rospy.init_node(nodeName)
- 调用 Service。
# 等待服务器连接
rospy.wait_for_service(serviceName)
# 第一个参数:服务名。第二个参数:数据类型。
call = rospy.ServiceProxy(serviceName, TwoInts)
# 调用服务
result = call(request)
- 完整示例代码。
#!/usr/bin/env python
# coding:utf-8
import rospy
from rospy_tutorials.srv import AddTwoInts, AddTwoIntsRequest, AddTwoIntsResponseif __name__ == '__main__':# 创建节点rospy.init_node('client_node')# 服务名称地址service_name = '/shiyan/my_server'client = rospy.ServiceProxy(service_name, AddTwoInts)# 确保 server 是存在的,等待服务开启, 阻塞代码rospy.wait_for_service(service_name)# 给 server 发请求request = AddTwoIntsRequest()request.a = 16request.b = 8response = client.call(request)if isinstance(response, AddTwoIntsResponse):print response.sumrospy.spin()
- 调试 Client 端。
开启 Server 端,执行 Client 端,返回计算之后的和。
# 切换到工作空间目录下
cd /home/shiyanlou/ws
# 使用 catkin_make 编译项目
catkin_make
# source 开发环境
source devel/setup.zsh
# 运行编译 Server 端,如果前面的命令中已经执行过了,这里就不需要重复执行
rosrun demopy server_node.py
# 运行编译 Client 端
rosrun demopy client_node.py

rosservice 命令
- 查询所有的 Service,上面已经使用过。
rosservice list

- 查询 service 详情。
rosservice info /shiyan/my_server

-
Node:当前 server 所在的 Node 节点。 -
URi:显示 ROSRPC uri 服务。 -
Type:传输的数据类型。 -
Args:请求参数。 -
查询 service 传输的数据类型。
rosservice type /shiyan/my_server

- 模拟 client 端调用服务,上面已经使用过。
# 注意这个命令的输入需要技巧,先输入 rosservice call /shiyan/my_server,然后按 tab 键它会自动补全,最后再修改 a 和 b 的值
rosservice call /shiyan/my_server "a:30 b:3"

- 查询 service 请求参数。
rosservice args /shiyan/my_server

到此,我们通过编写 Server 端和 Client 端实现计算求和的例子,知道了 Service 的一些常用 API,了解了它们之间是如何通讯的,并通过 ros 提供的工具进行调试验证代码是否正确。





