ROS2在Windows操作系统下的应用
- 概述
- 一、windows10操作系统下安装ROS2
- 二、ROS2命令行操作
- 三、ROS2开发环境配置
- 四、工作空间与功能包
- 五、节点—系统的最小单位
- 六、话题—节点间传递数据的通道
- 七、服务—节点间的通道应答
- 八、通信接口—传递数据的标准结构
- 九、动作—完整行为的流程管理
- 十、参数—系统的全局字典
- 十一、分布式通信—多计算平台的任务分配
- 十二、DDS—机器人的神经网络
- 十三、Launch—多节点启动与配置脚本
- 十四、TF—机器人坐标系管理工具
- 十五、URDF—ROS机器人建模方法
- 十六、Gazebo—3D物理仿真平台
- 十七、Rviz—3D可视化显示平台
- 十八、RQT—模块化可视化工具
- 十九、工业六轴机器人项目实战
- 二十、工业智能控制系统项目实战
概述
目前国内的工控行业普遍处于自动化阶段,而数字化和智能化必然是未来的趋势。机器人行业绝对不会只是像现在工厂里的工业机器人一样的程式化。一定会变得更加智能,自动化行业必将有颠覆式的发展。ROS是目前主流且开源的机器人操作系统,历经多年的实际应用,各种问题已经暴露出来了,在最新版的ROS2中有针对性的做出了改进,ROS2为工控行业迈向智能化提供了一个优秀的系统平台。相信随着时代的发展,ROS2未来一定会在工控行业得以广泛使用。
本人从事的工控行业,大多数的工控软件及相关的程序开发都是基于windows的。在我的实际项目中也全都是windows的相关开发,基于对windows系统及windows系统下的编程比较熟悉;ROS2对windows系统的支持,本人十分兴奋。早就想一探究竟,各种原因一直拖到现在也没有开始学习。
现在决定开始学习Windows下的ROS,现在记录一下学习过程,以备后续使用。将其应用到本公司的设备开发之中。
一、windows10操作系统下安装ROS2
1.安装Chocolatey,Chocolatey是一个在Windows系统下安装的软件,具体安装过程参照官网点击打开链接官网安装链接,管理员模式打开PowerShell,安装官网安装教程中的命令复制粘贴输入后回车即可安装(下面就是官网复制来的,可以直接使用):
@"%SystemRoot%\System32\WindowsPowerShell\v1.0\powershell.exe" -NoProfile -InputFormat None -ExecutionPolicy Bypass -Command "iex ((New-Object System.Net.WebClient).DownloadString('https://community.chocolatey.org/install.ps1'))" && SET "PATH=%PATH%;%ALLUSERSPROFILE%\chocolatey\bin"
安装成功后,在CMD输入会有如下提示:

choco install -y python --version 3.8.3
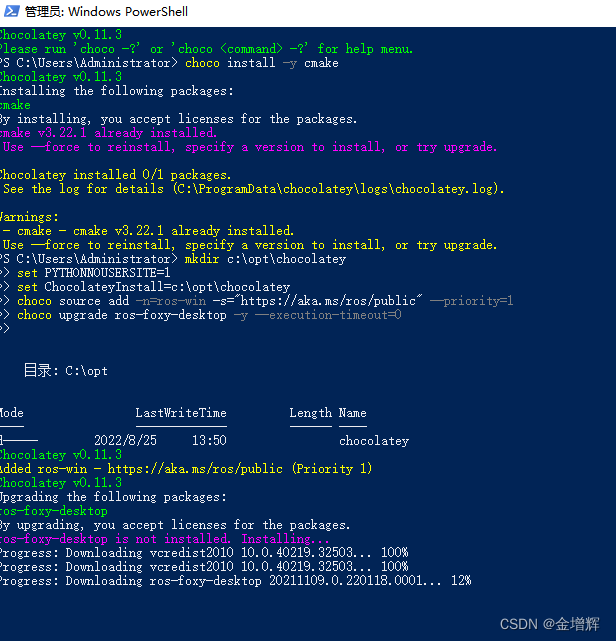
2.复制下面的代码到终端安装ROS2,中间会自动下载并安装好ROS2
mkdir c:\opt\chocolatey
set PYTHONNOUSERSITE=1
set ChocolateyInstall=c:\opt\chocolatey
choco source add -n=ros-win -s="https://aka.ms/ros/public" --priority=1
choco upgrade ros-foxy-desktop -y --execution-timeout=0
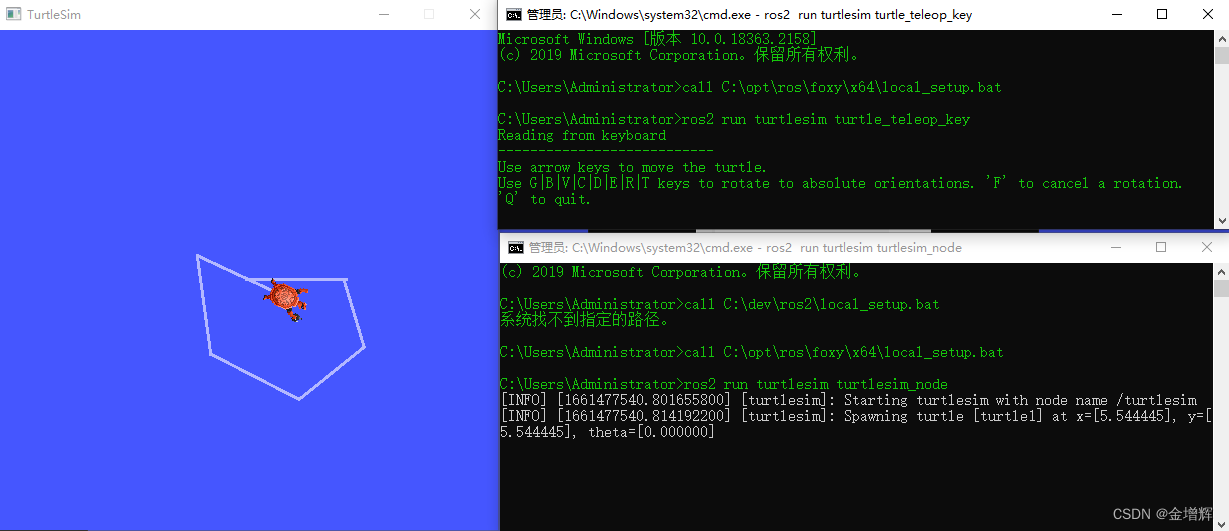
4.这个时候需要打开cmd了,Win+R,cmd,输入下面的两行指令
call C:\opt\ros\foxy\x64\local_setup.bat
ros2 run turtlesim turtlesim_node
5.再启动一个窗口~
call C:\opt\ros\foxy\x64\local_setup.bat
ros2 run turtlesim turtle_teleop_key
6.运行结果如下:
6.制作一个bat文件方便启动ROS2,新建一个TXT文件输入如下指令,将其另存为bat格式:
cmd /k "cmd /k "cd /d C:\opt\ros\foxy\x64\&&local_setup""
下次启动的时候直接双击这个文件即可运行。