文章目录
- 1 D435i相机简介
- 2 相机驱动的安装
- 2.1 安装IntelRealSense SDK2.0
- 2.2 realsense-ros的安装
1 D435i相机简介
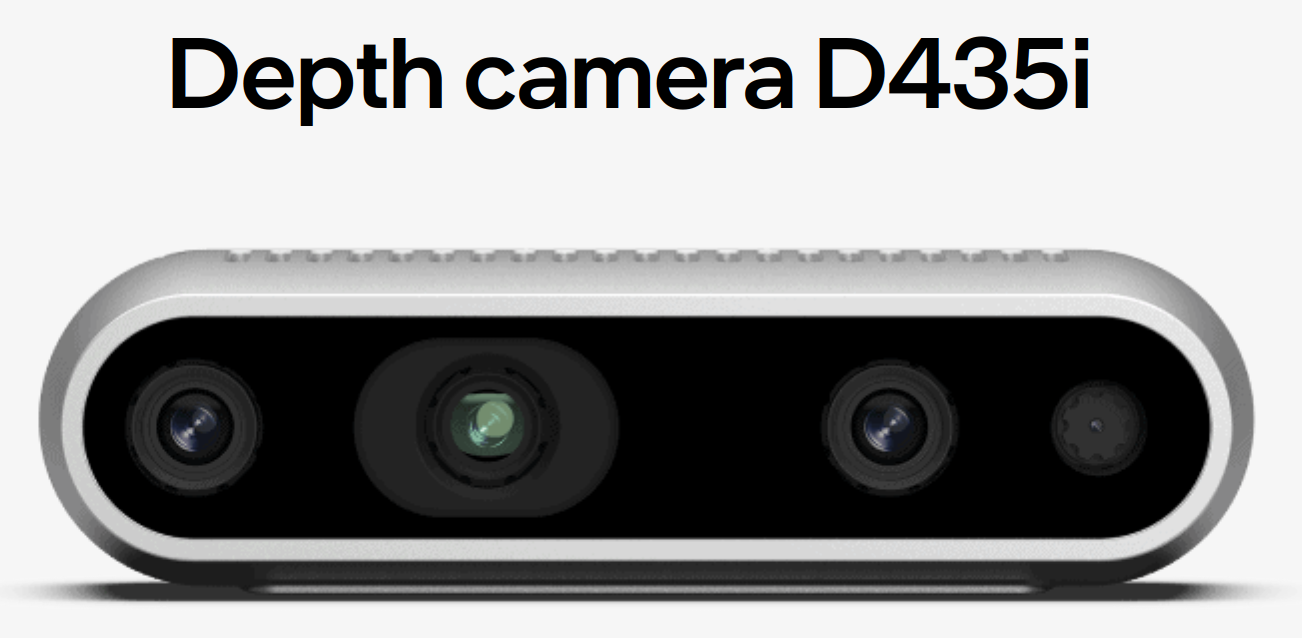
D435i相机是一个双目视觉深度相机,内部集成了IMU,支持在不同的操作系统使用,有开源的驱动包IntelRealsense SDK2.0.
相机通过双目视觉计算深度,有左右放置的两个摄像头和一个红外光发射器,红外发射器能在低纹理的场景提高深度的准确率。
相机的系统结构图如下所示,
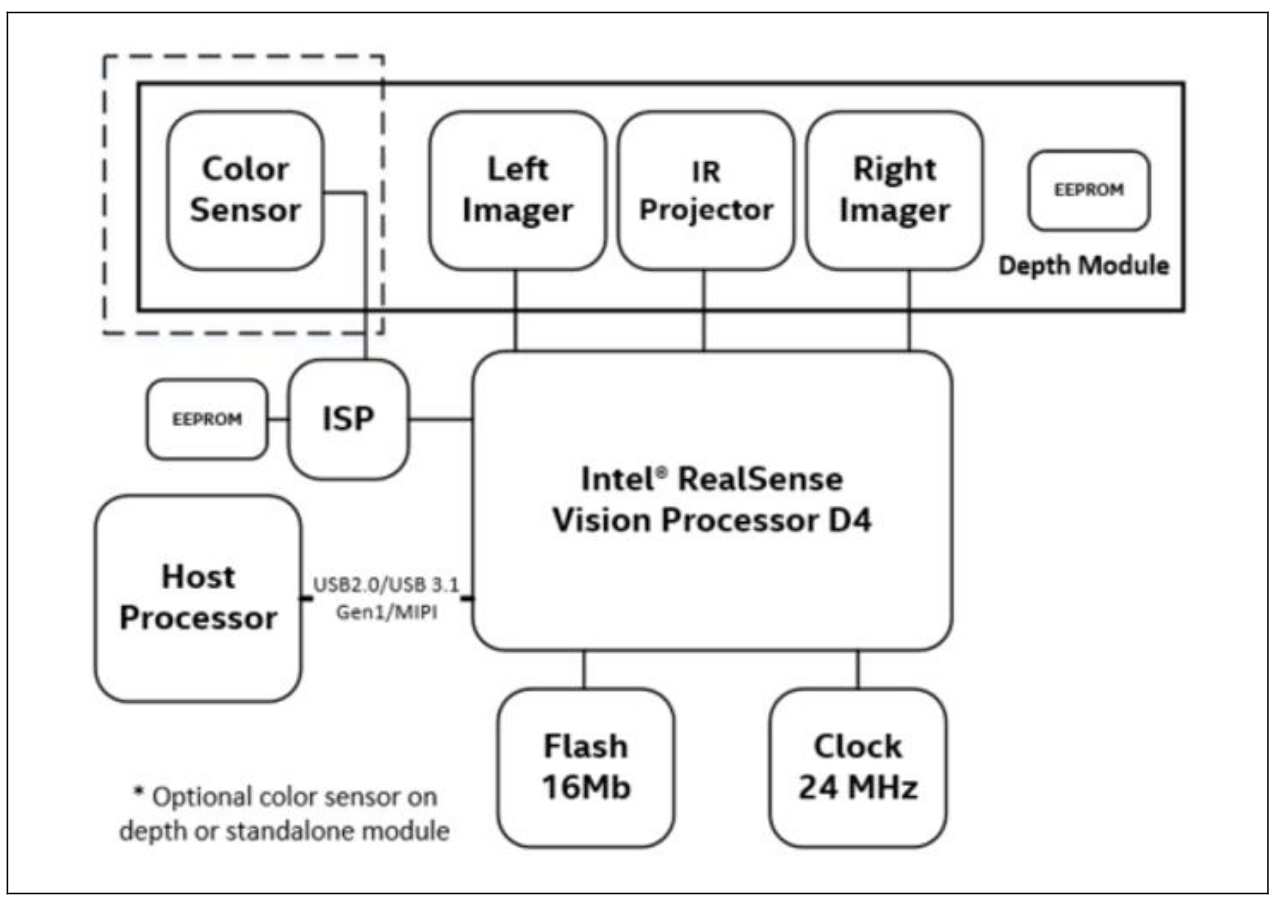
如图所示,相机系统包括两个主要部分,深度模块和视觉处理模块。不过多介绍了,没啥意思。
更多信息可以去官网了解。
2 相机驱动的安装
系统环境:Ubuntu20.04 + ROS-noetic
参考链接:https://github.com/IntelRealSense。
2.1 安装IntelRealSense SDK2.0
IntelRealSense SDK2.0是这款相机的一个跨平台的库,这个SDK可以让我们看到深度和彩色图像信息,提供内外参标定信息,官方介绍如下:
The SDK allows depth and color streaming, and provides intrinsic and extrinsic calibration information. The library also offers synthetic streams (pointcloud, depth aligned to color and vise-versa), and a built-in support for record and playback of streaming sessions.
点击官方安装教程,可以看到简单地用apt命令行工具安装。
安装步骤:
- 注册服务器的publish key
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
如果失败了,输入export http_proxy="http://<proxy>:<port>" 再重新输入上条命令。
- 把服务器添加到仓库列表
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
- 安装库
sudo apt update
sudo apt install librealsense2-dkms
sudo apt install librealsense2-utils
- 可选安装,如果安装realsense-ros的话必须安装
sudo apt install librealsense2-dev
sudo apt install librealsense2-dbg
- 验证安装
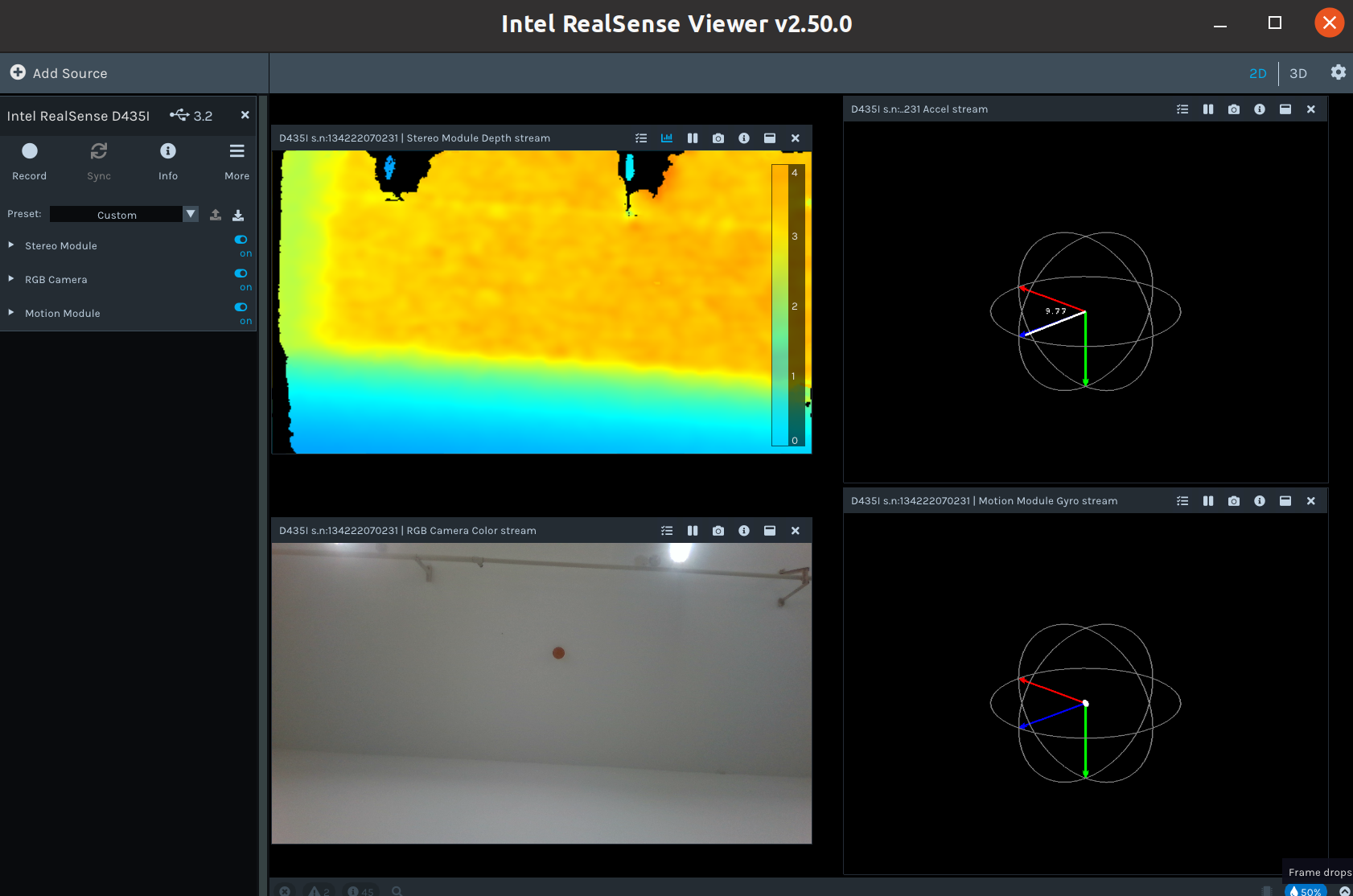
终端运行realsense-Viewer,可以出现如下画面证明安装成功了。
2.2 realsense-ros的安装
如果我们想用ros驱动相机那么就需要安装这个包,点击官方教程可以看到有两种安装方式,第一种是用apt安装,第二种是用源码安装。第一种方式安装极其简单,但是如果运行VINS等时候需要对包中的launch文件进行修改,所以还是采用第二种方式,用源码安装。
安装步骤:
- 安装最新的IntelRealSense SDK2.0
这个上面已经安装完了。
- 安装realsense-ros
- 创建一个工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
- 克隆源代码,第三行不报错就没事
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
cd ..
- 安装ros包ddynamic_reconfigure
sudo apt install ros-noetic-ddynamic-reconfigure
- 编译安装
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
至此,realsense-ros就安装完成了。
几个使用说明:
- ros中启动camera节点,可以查看发布的话题
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
roslaunch realsense2_camera rs_camera.launch
rostopic list
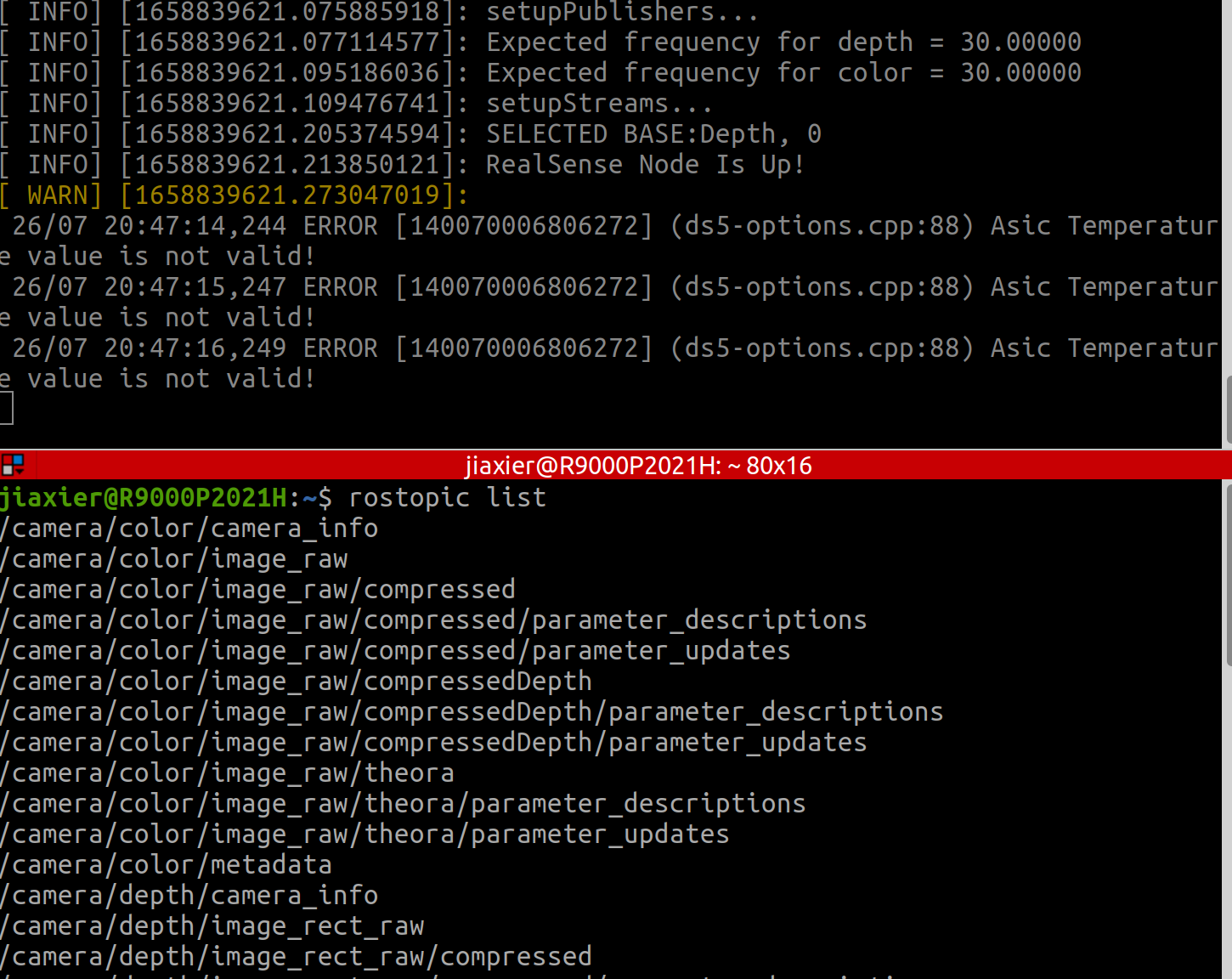 上边窗口启动节点,下边节点查看话题。节点的launch文件中的参数含义也可在readme中查看。
上边窗口启动节点,下边节点查看话题。节点的launch文件中的参数含义也可在readme中查看。
注:启动节点最后的三个error是正常现象。
- 使用点云选项发布点云,可在rviz中查看
第一个终端
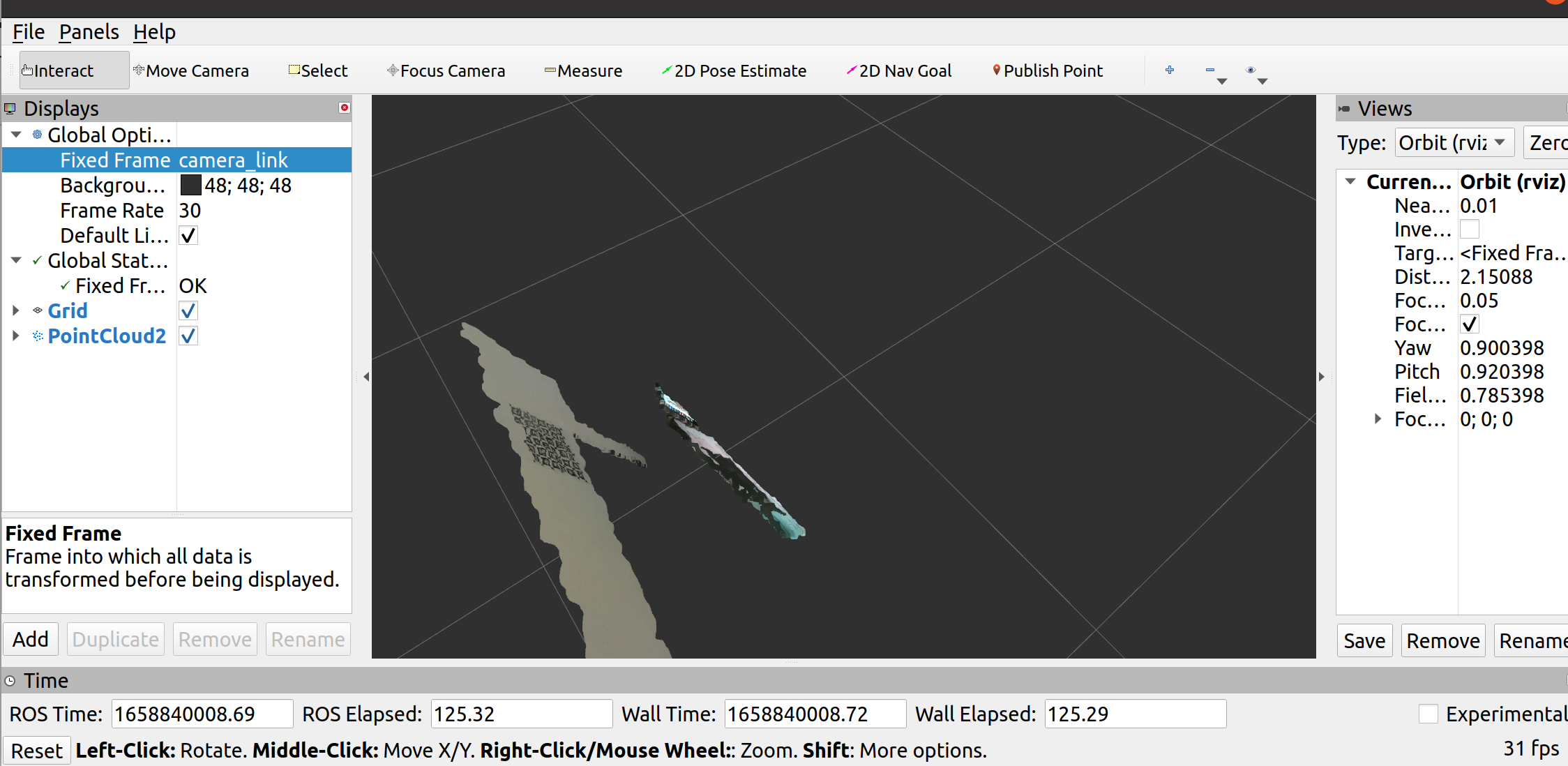
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
第二个终端
rivz
进入rivz后,首先将Fixed Frame改成camera_link,这样Global State就不报错了,然后点左下角的Add用by topic添加PointCloud2话题就会显示出点云图。
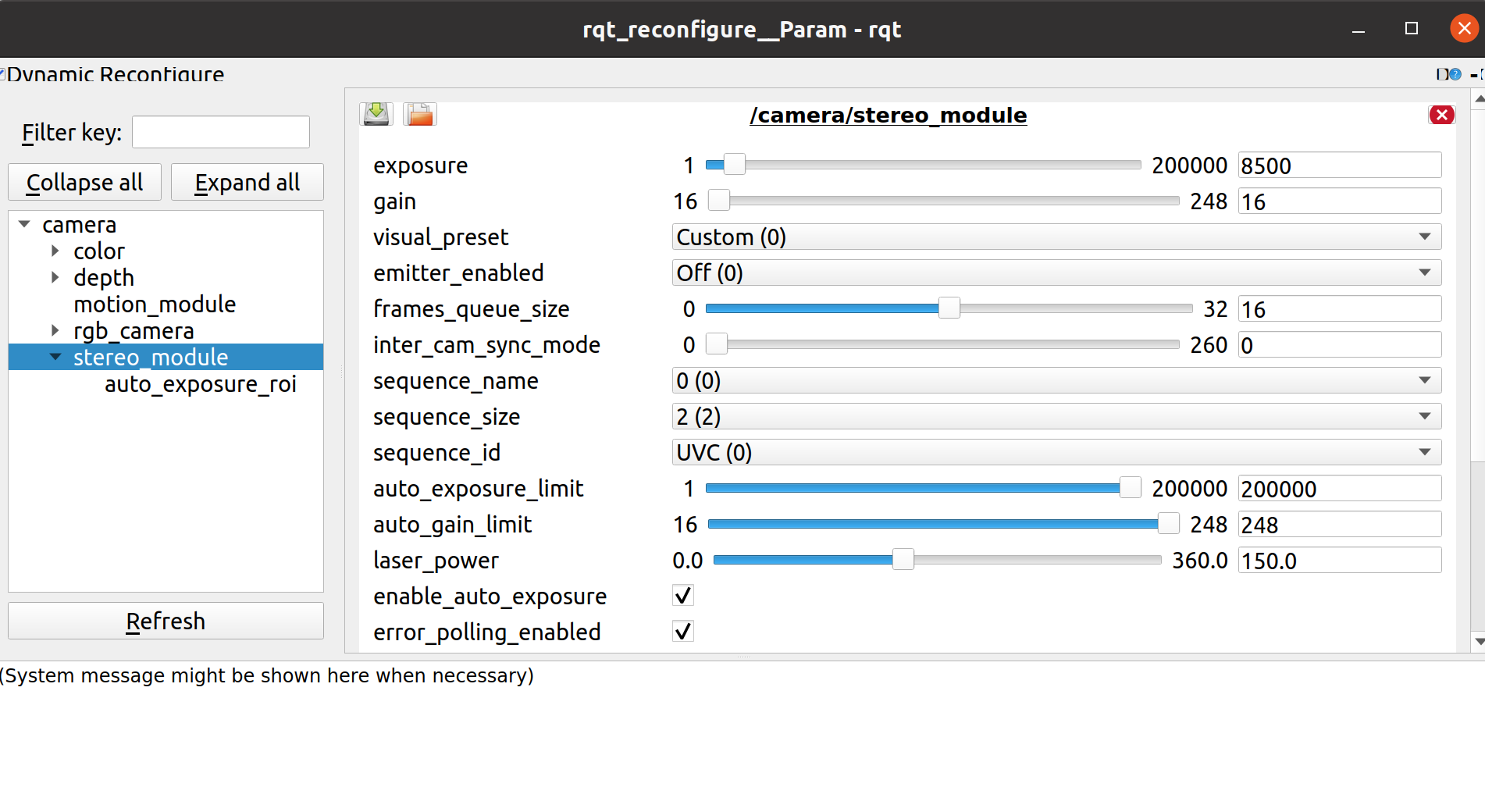
- 使用Dynamic Reconfigure控制相机,如关闭红外光。
启动camera节点后,终端输入rosrun rqt_reconfigure rqt_reconfigure后出现如下界面,
 点击stereo_module,把右侧emitter_enabled改成Off(0)就关闭了红外光。
点击stereo_module,把右侧emitter_enabled改成Off(0)就关闭了红外光。