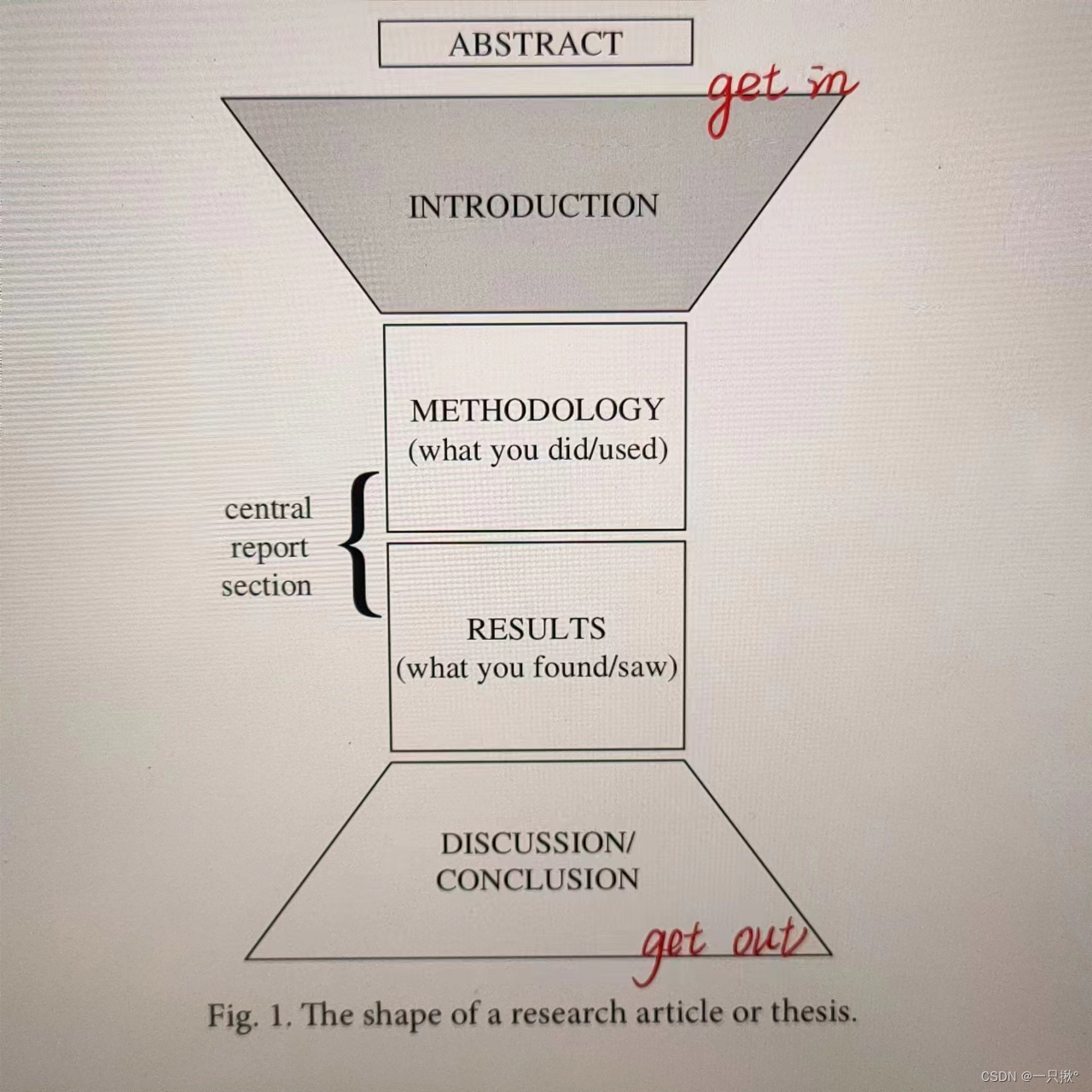
论文第一部分一般称为“引言(Introduction)”,而不是“前言”,“前言”是用在书里的。
引言的结构:
1.意义+背景+问题
意义:从更大的范围称述这个课题的研究意义。比如多机器人SLAM,应该先说SLAM的重要性。
背景:从问题的源头出发,也就是这一研究方向前人已经做了哪些重要的创新工作,可以说是一个简略的研究史,首先是具有代表性的经典文献,年份相对较早,说明问题的源头,早期研究的人员做出的贡献。
问题:然后研究到目前这个阶段,本课题作为这个细分领域有哪些创新型的文献。并针对这个问题从优缺点角度科学、实事求地分析、评述国内外文献提出的方法。
2.本文方法
本文所用方法和创新点、亮点
引用文献的方法
1.文献 右上角 [数字]
2.第一作者等 右上角 [数字]
3.一句话中或是结尾 右上角 [数字],或是。
注意事项
1.言简意赅,突出重点。不应过多叙述同行熟知的及教科书中的常识性内容,确有必要提及他人的研究成果和基本原理时,只需以参考引文的形式标出即可。在引言中提示本文的工作和观点时,意思应明确,语言应简练。
2.引言的内容不应与摘要雷同,不应是摘要的注释和扩展。引言一般应与结论相呼应,在引言中提出的问题,在结论中应有解答,但应避免引言与结论雷同。
3.引言不要插图、列表和数学公式的推导证明。
5.引言中出现的所有的参考文献中,应该突出近年来的文献,尤其近三年的参考文献,至少占一半。
6.关于文献引用的方法:首先找到跟本研究方向(主题)一致的硕博论文,其中的绪论(引言)部分会对该领域的研究进行深入分析国内外研究现状,会涉及到大量的参考文献,可以作为借鉴。
举例:动态环境下基于改进几何与运动约束的机器人RGB-D SLAM 算法
引言:
第一段:得益于相机成本低、信息量大等优点,近年来,基于视觉的同时定位与地图创建(simultaneous localization and mapping,SLAM)系统在移动机器人、自动驾驶、增强现实等领域[1-3] 得到了广泛应用.为了简化问题,现阶段大部分视觉SLAM 系统都假设相机处于静态场景,视野内不存在运动物体,图像信息的变化仅仅是因为相机自身运动以及噪声的影响,然而实际环境中却不可避免地存在运动物体.
第二段:动态场景下视觉SLAM 的挑战主要源于传统视觉SLAM 无法区分运动特征点与静态特征点,在计算相机位姿时,错误地把运动特征点当成静态特征点进行计算,导致计算出来的相机位姿和实际位姿有极大偏差.尽管一些优化算法,例如随机抽样一致性(random sample onsensus,RANSAC) [4]、光束平差法(bundle adjustment,BA)可以在静态特征点占绝大多数时,把运动特征点当作外点处理,但当运动特征点较多时,系统无法区分运动和静止的特征点,位姿估计会有极大误差.因此,如何有效地区分出运动和静止的特征点是视觉SLAM 系统中至关重要的问题.
第三段:高成强等[5] 基于双单高斯模型(single Gaussian model,SGM)来构建图像块的灰度值变化模型,依据图像块方差的变化,区分前景和背景,可以检测单个和2 个行人的运动.Detect-SLAM 方法[6] 利用目标检测算法去除运动目标上的特征点,但该方法对硬件要求较高,需要使用高性能显卡对图像进行语义分割.另外,上述2 种将运动区域从图像中分割出来的方法由于边界框覆盖区域大于真实运动区域,往往会造成运动物体附近的静态特征点被误剔除.Sabzevari 等[7] 利用轮式车辆阿克曼转向几何来约束相机运动,满足运动约束条件的特征点为静态特征点,但由于给相机添加了额外的运动约束,适用范围较窄.张慧娟等[8] 提出一种基于线特征的RGB-D 视觉里程计方法,通过计算直线特征的静态权重来剔除动态直线特征,但相比于提取特征点,直线特征的提取较困难.Alcantarilla 等[9] 将场景流引入视觉里程计,对图像进行额外的场景流计算,通过比较特征点场景流的变化来检测动态特征点.为进一步提高视觉SLAM 系统在动态场景下的鲁棒性,林志林等[10] 提出一种把场景流和虚拟地图点相结合的方法,先引入场景流构建高斯混合模型,再构造虚拟地图点,将运动的特征点与虚拟特征点进行匹配,并纳入位姿估计的优化框架.相比于上述6 种方法,使用特征点的几何约束来判断运动特征点不会将运动物体附近的静态点覆盖.由于没有减小相机运动自由度,适用范围较广.运动特征点识别部分所消耗的计算资源也最低.但实际上,使用特征点的几何约束容易受到噪声影响,动、静态特征点分离效果较差,导致SLAM 系统的鲁棒性和精度较差.
第四段:为了解决这个问题,本文算法采用了几何及运动约束,将特征点分为静态特征点(以下称静点)、状态未知点、疑似静态特征点(以下称可疑静点)、运动特征点(以下称动点)以及错误匹配点.其中,对静点的判断使用了严格的几何约束,对状态未知点则使用多帧的观测信息将其区分为可疑静点、动点及错误匹配点,并进行卡尔曼滤波.最后,将静点、动点以及可疑静点一起加入位姿优化.本文运动检测所需的计算量较少,系统运行速度较快.得益于准确度较高的动态特征点分离方法,而且动、静态特征点是一起加入位姿优化的,本文SLAM 算法的精度和鲁棒性均表现较好.