目录
1、相机成像原理说明
2、相机成像过程
2.1、世界坐标系->相机坐标系
2.2、相机坐标系–>图像坐标系
2.3、图像坐标系–>像素平面坐标系
3、单点无畸变的相机成像模型
近期项目需进行单目测距、及像素坐标与实际物理距离估算,对相机成像相关知识点进行整理。
1、相机成像原理说明
数码相机图像拍摄的过程实际上是一个光学成像的过程。相机的成像过程涉及到四个坐标系: 世界坐标系、 相机坐标系、 图像坐标系、 像素坐标系以及这四个坐标系的转换。 相机模型是光学成像模型的简化, 最基本的透镜成像原理如图1 所示:
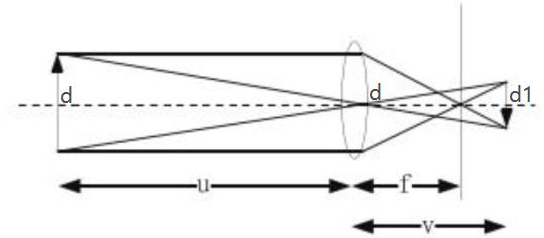
其中 u 为物距, f 为焦距, v 为相距。 三者满足关系式:
推导过程:
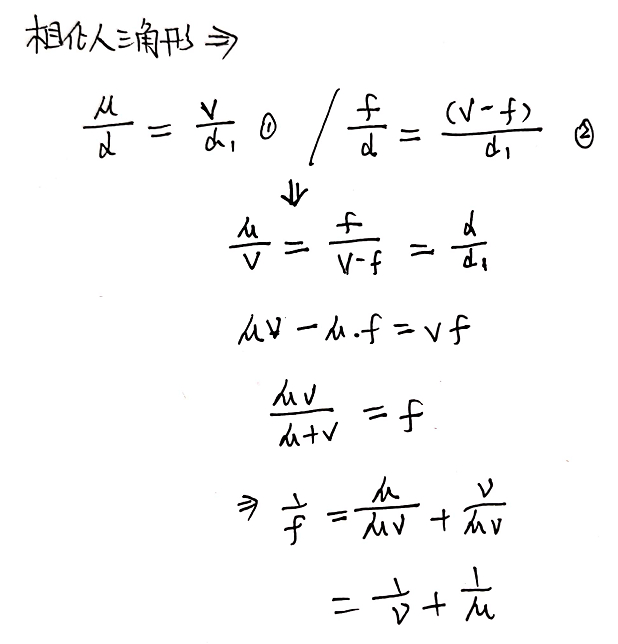
相机的镜头是一组透镜, 当平行于主光轴的光线穿过透镜时, 会聚到一点上, 这个 点叫做焦点, 焦点到透镜中心的距离叫做焦距 f。 数字相机的镜头相当于一个凸透镜, 感光元件就处在这个凸透镜的焦点附近, 将焦距近似为凸透镜中心到感光元件的距离时就成为小孔成像模型。小孔成像模型如图 2 所示:
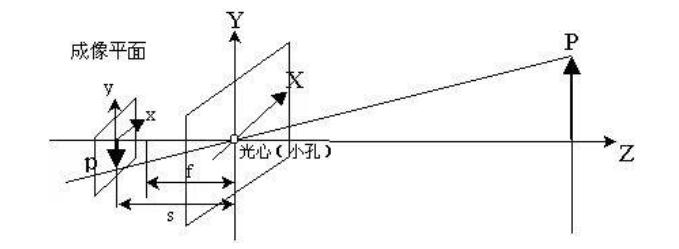
基于上图,当 s 和 f 相等的时候,便是相机的成像模型。 小孔成像模型是相机成像采用最多的模型。 在此模型下, 物体的空间坐标和图像坐标之间是线性的关系, 因而对像素坐标的求解就归结到求解线性方程组上。
对于针孔相机模型, 如图3所示(其中f为相机焦距),对于真实世界中的空间点Pw(Xw,Yw,Zw),其对应的相机坐标系坐标为Pc(Xw,Yw,Zw),对应的图像坐标系坐标为P(x ,y),对应的像素坐标为p(u,v)。
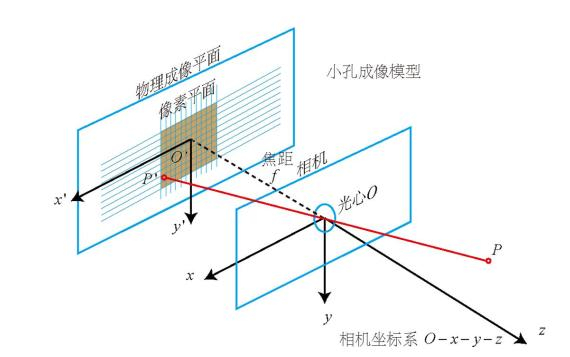
世界坐标系:是客观三维世界的绝对坐标系,也称客观坐标系。
相机坐标系(光心坐标系):以相机的光心为坐标原点, X 轴和 Y 轴分别平行于图像坐标系的 X 轴和 Y 轴,相机的光轴为 Z 轴。
图像坐标系:以图像平面的中心为坐标原点,X 轴和 Y 轴分别平行于图像平面的两条垂直边, 用( x , y )表示其坐标值。 图像坐标系是用物理单位(例如毫米)表示像素在图像中的位置。
像素坐标系:以图像平面的左上角顶点为原点,X 轴和 Y 轴分别平行于图像坐标系的 X 轴和 Y 轴,用(u , v )表示其坐标值,单位是像素。
2、相机成像过程
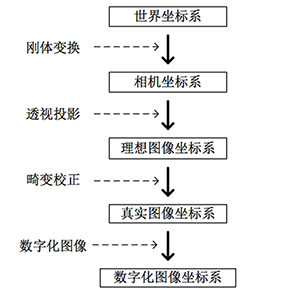
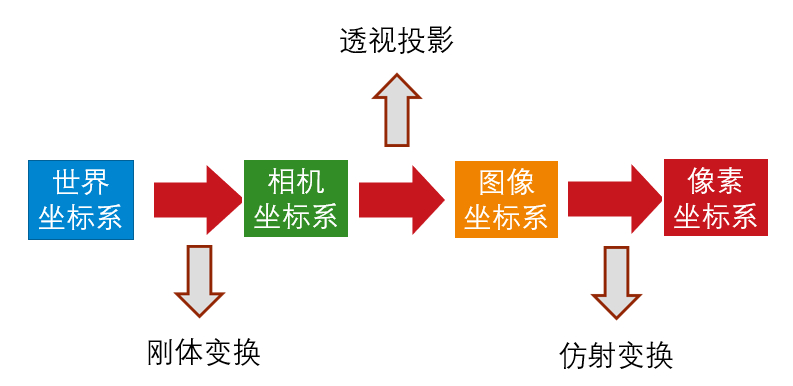
相机成像模型就是用数学公式刻画整个成像过程,即被拍摄物体空间点到照片成像点之间的几何变换关系。总体上,相机成像可以分为四个步骤:刚体变换、透视投影、畸变校正和数字化图像。
2.1、世界坐标系->相机坐标系
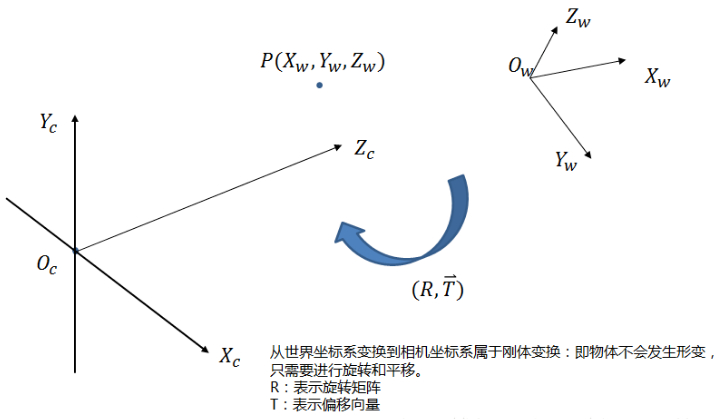
从世界坐标系到相机坐标系,涉及到旋转和平移(其实所有的运动也可以用旋转矩阵和平移向量来描述)。绕着不同的坐标轴旋转不同的角度,得到相应的旋转矩阵,如下图所示:
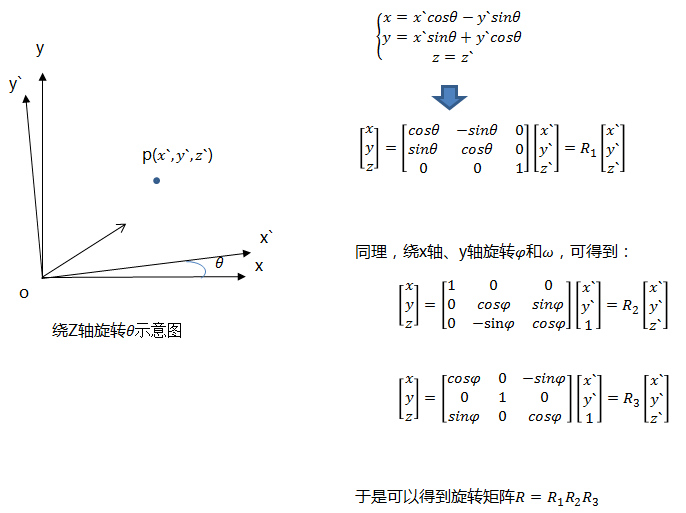
那么从世界坐标系到相机坐标系的转换关系如下所示:
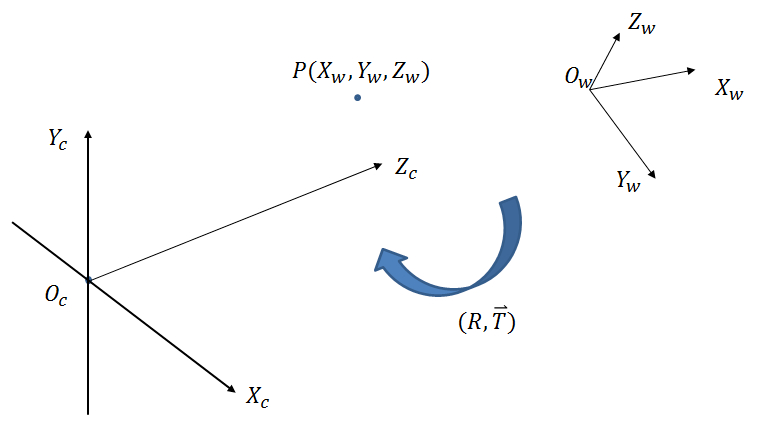
于是可以得到P点在相机坐标系中的坐标:
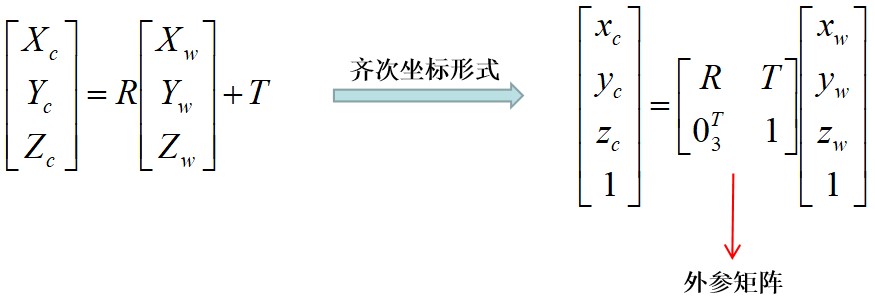
其中R,T为相机外参。写成齐次坐标的方式是为了方便矩阵运算。其中R为3*3矩阵,T为3*1向量,0为1*3向量,1为常数项。
2.2、相机坐标系–>图像坐标系
真实世界中的某点会投影在相机的成像平面上,利用针孔成像原理,空间任意一点Pc与图像点p之间的关系,Pc与相机光心Oc的连线为OcPc,与像面的交点p即为空间点Pc在图像平面上的投影。
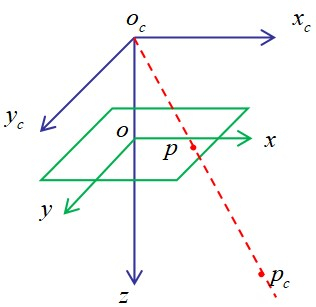
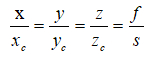
该过程为透视投影,利用相似三角形关系可得:
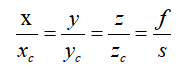
其中f为焦距,z轴方向上s为Pc点到光心的距离,一般称为比例因子,展开可得:
![]()
写成矩阵形式,则投影关系为:
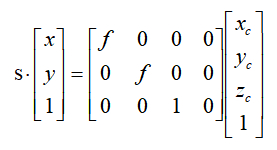
其中,s为比例因子(s不为0),f为有效焦距(光心到图像平面的距离),(x,y,z,1)T是空间点P在坐标系oxyz中的齐次坐标,(x,y,1)T是像点p在图像坐标系OXY中的齐次坐标。
注意:此时投影点p的单位还是mm,并不是pixel,需要进一步转换到像素坐标系。
2.3、图像坐标系–>像素平面坐标系
像素坐标系和图像坐标系都在成像平面上,只是各自的原点和度量单位不一样。图像坐标系的原点为相机光轴与成像平面的交点,通常情况下是成像平面的中点或者叫principal point。图像坐标系的单位是mm,属于物理单位,而像素坐标系的单位是pixel,我们平常描述一个像素点都是几行几列。所以这二者之间的转换如下:
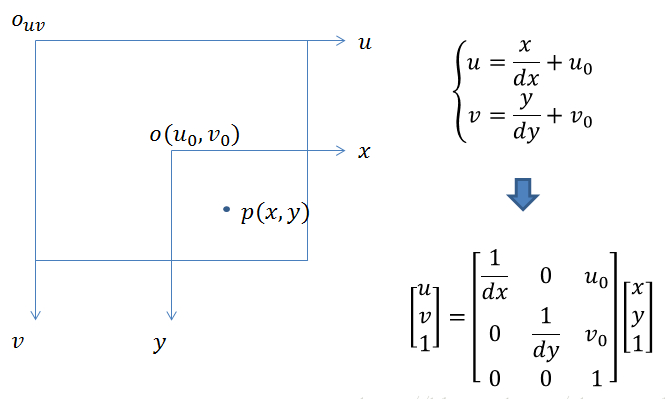
其中dx和dy表示每一列和每一行分别代表多少mm,即1pixel=dx mm。
3、单点无畸变的相机成像模型
理想的世界坐标->像素坐标系转换过程如下:
以上关系整理:

所以得,单点无畸变的相机成像模型如下:
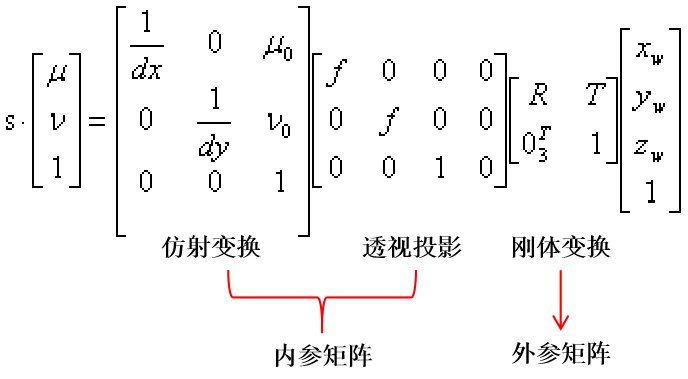
其中,(Xw,Yw,Zw)为世界坐标系下一点的物理坐标,(u,v)为该点对应的在像素坐标系下的像素坐标,s为尺度因子(该点在相机轴距方向上与成像平面的距离)。
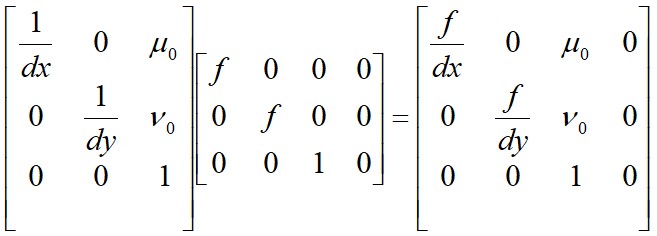
称为内参矩阵,内参矩阵取决于相机的内部参数。其中,f为像距,dx、dy分别表示x,y方向上的一个像素在相机感光板上的物理长度(即一个像素在感光板上是多少毫米),分别表示相机感光板中心在像素坐标系下的坐标。
将矩阵:

称为相机的外参。外参矩阵取决于相机坐标系和世界坐标系的相对位置,R表示旋转矩阵,T表示平移矢量。