文章目录
- About the TIS
- TIS Nomenclature(TIS术语)
- TIS Dialog Tabs(TIS对话框选项卡)
- TIS Scan Patterns
- 行扫描
- Z扫描
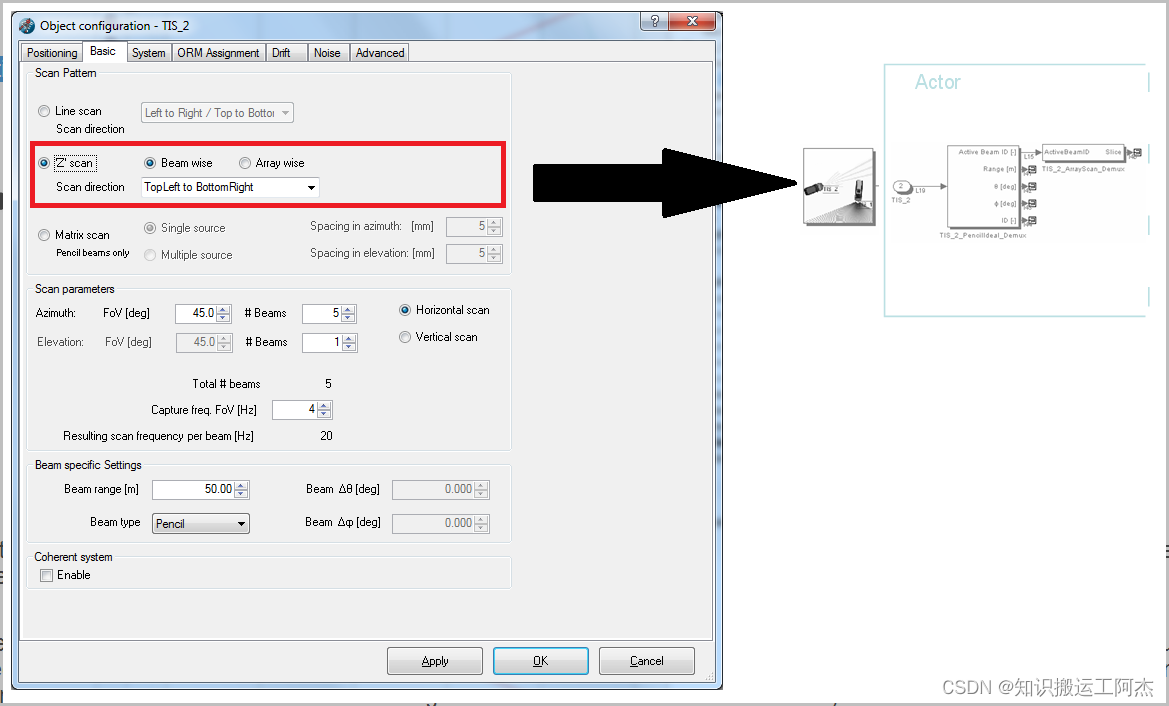
- Z扫描波束
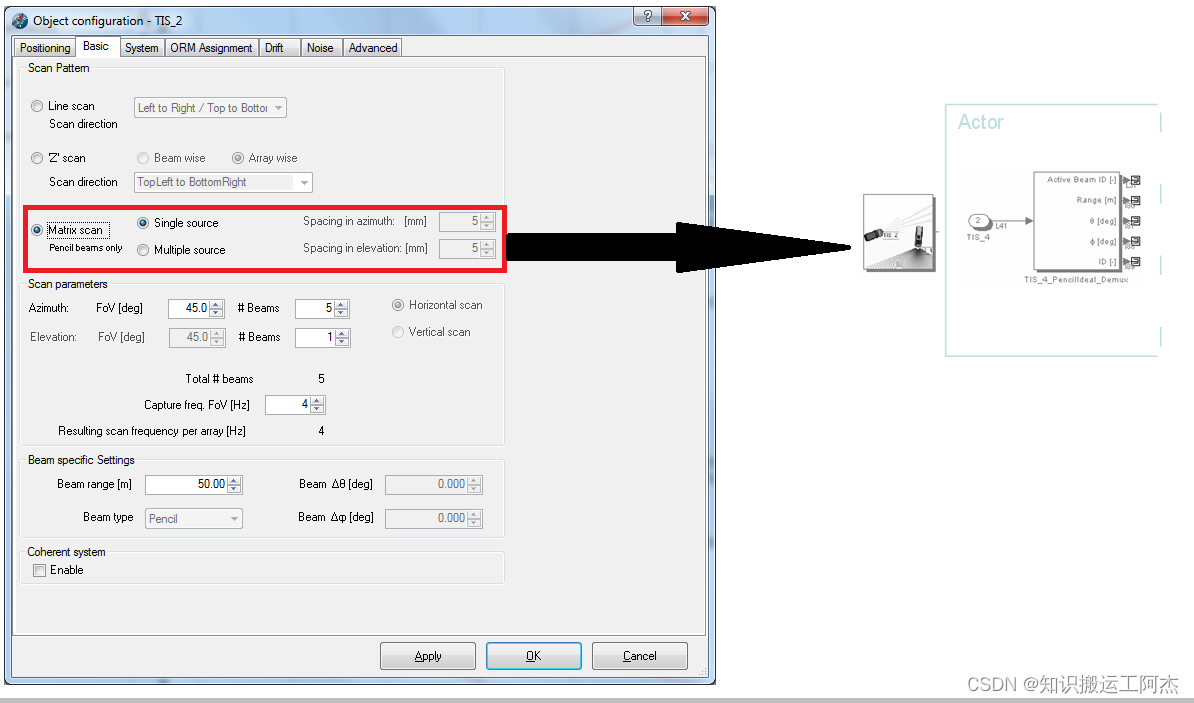
- 矩阵扫描
- TIS Computational Limitations(TIS计算限制)
- TIS Accuracy(TIS Accuracy)
- Sensor Assignment(传感器分配)
- Assignment Validity Check
About the TIS
TIS帮助用户增加对主动扫描传感器的一般知识和理解。它的操作与特定技术(如雷达、激光雷达或激光扫描仪)无关,但TIS确实根据这些设备的常见操作原理工作。
其操作与特定技术无关,这也解释了其名称:technology Independent Sensor(简称TIS)。
TIS可用于在系统级验证任何主动扫描传感器(如雷达和/或激光扫描仪)的标准性能规范。这些规格可以直接表示为“射程”、“视场”和发射的光束数,但也可以更复杂,如“测距精度”、“射程分辨率”、“角度精度”、”角度分辨率”和接收功率。有关定义,请参阅TIS术语。
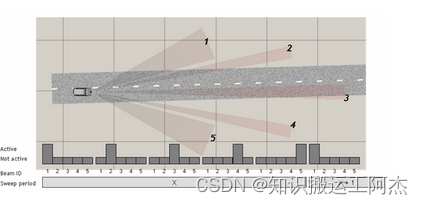
TIS与可重复的交通场景相结合,应帮助用户选择适当的传感器,并帮助他理解传感器特性与例如所实现的跟踪和跟踪算法的性能之间的联系。其原因是TIS在场景离散化方面特别强大。注意,任何有源扫描设备的离散化以两种方式进行,即:
·在空间上,由于照射目标的光束数量有限,导致所谓的“灰色区域”,无法检测到任何物体(当然,除非出现多径反射率,这是TIS无法处理的);
·由于目标被有效照明并可能被检测到的时间有限。下图显示了激活光束的开启和关闭机制。
Simulink中的TIS表示
根据用户选择,TIS传感器可以输出每束多达100个目标的数据。TIS传感器解复用模块可包含以下信号:
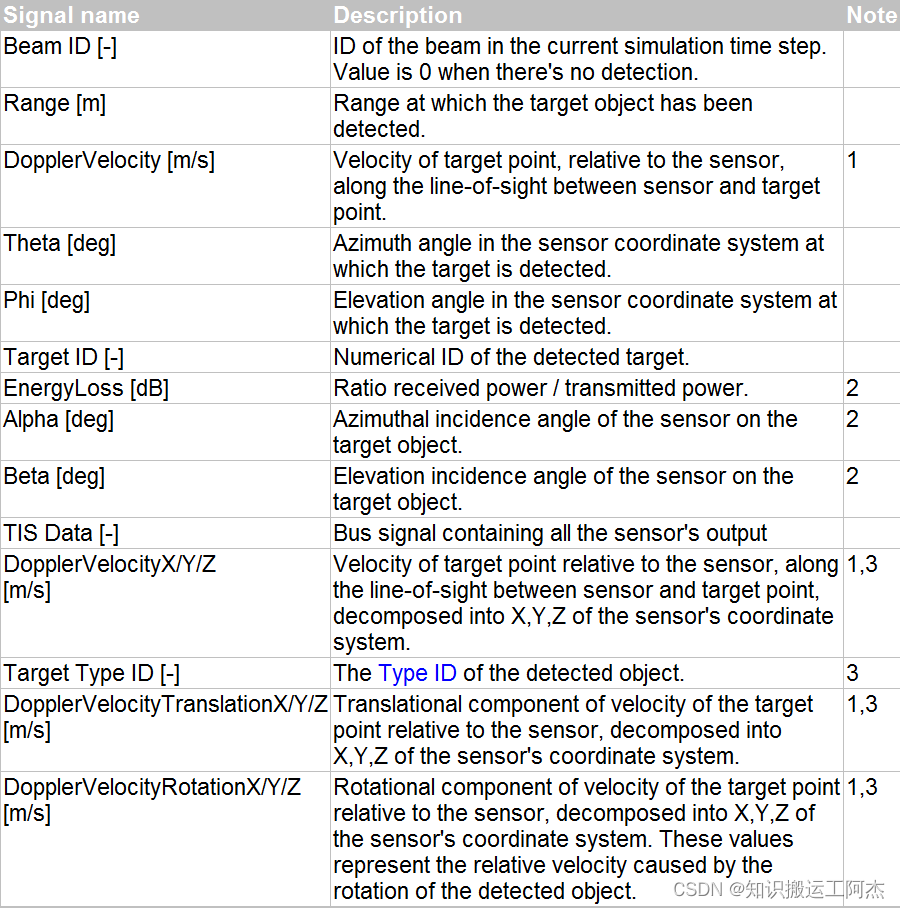
注1:这些信号仅在传感器为“相干系统”时可用。
注2:这些信号仅在传感器启用“ORM端口”时可用。
注3:这些信号仅作为TIS数据信号的一部分可用。
信号名称
描述
波束ID[-]
当前模拟时间步长中波束的ID。没有检测时,值为0。
范围[m]
检测到目标对象的范围。
倍率[m/s]
沿着传感器和目标点之间的视线,目标点相对于传感器的速度。
theta
传感器坐标系中检测目标的方位角。
Phi[deg]
传感器坐标系中检测目标的仰角。
目标ID[-]
检测目标的数字ID。
无能量[dB]
接收功率与发射功率之比。
alpha[度]
传感器在目标物体上的方位角入射角。
β
传感器在目标物体上的仰角入射角。
TIS数据[-]
包含所有传感器输出的总线信号
DopplerVelocityX/Y/Z[m/s]
目标点相对于传感器的速度,沿着传感器和目标点之间的视线,分解为传感器坐标系的X、Y、Z。
目标类型ID[-]
检测到的对象的类型ID。
DopplerVelocityTranslationX/Y/Z[m/s]
目标点相对于传感器的速度平移分量,分解为传感器坐标系的X、Y、Z。
DopplerVelocityRotationX/Y/Z[m/s]
目标点相对于传感器的速度旋转分量,分解为传感器坐标系的X、Y、Z。这些值表示由检测对象的旋转引起的相对速度。
注1:所有读数都是有源光束ID的函数。因此,无论使用的光束数量如何,汇编表中TIS输出端口的所有信号都具有信号尺寸“1”。如果光束检测到不止一个物体,则信号宽度会相应改变;因此,如果光束可以检测到100个目标,则信号宽度设置为100。有关如何更改要检测的最大目标数的信息,请参阅要检测的最多目标数。
注2:输出的读数未排序;它们以每束的随机顺序出现。因此,传感器的不同对象总数可能超过100个,即,如果将最大目标设置为100个,则可以获得最近100个对象的数据,但数据集输出本身不是按特定顺序排列的。使用PreScan Simulink块sortTISoutput。/toolbox/blocks/PreScanUsefulBlocks中的mdl,根据您自己的考虑对输出进行排序。
**注3:**如果在模拟模式下,MATLAB®声明“由于内存限制,无法初始化图像”,则使用的数据空间太大。为了解决这个问题,可以配置MATLAB®为Java虚拟机提供更多内存(堆空间)。如何做到这一点取决于MATLAB®版本。请访问MathWorks的网站:www.MathWorks.com。您可以使用首选项对话框更改此设置。有关更多信息,请参阅“Java堆内存首选项”上的文档页面。
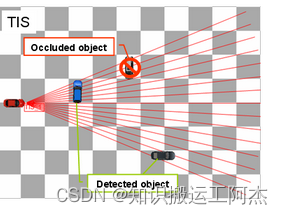
为了生成上述数据,TIS实际扫描目标几何图形。这与检测所谓边界框信息的AIR不同。AIR的另一个不同之处是TIS考虑了阻塞,而AIR没有考虑阻塞。下图显示了遮挡原理。
注:构建区域中的预扫描组件和传感器波束方向表示不完全真实,因为俯视图中的2D表示是固定的。只有围绕z轴(航向)的旋转才是真实可视化的。对象表示无法正确显示围绕x轴(倾斜)和y轴(倾斜体)的旋转。只有轴系统表示始终正确。
能量损失图是沿到达目标和返回TIS的路径的波束功率损失的度量。它是照明路径和反射路径的长度以及沿其发生的大气衰减的函数。照明目标的反射截面-由3D查找表确定,也称为对象响应模型(ORM)-在计算能量损失图时也考虑在内。
注:能量损失图和入射角不是标准输出。标记复选框ORM端口以获得此输出,请参阅TIS ORM选项卡。
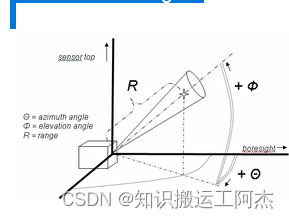
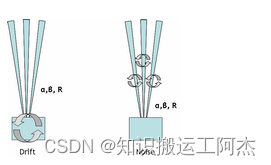
距离、方位角和仰角的定义
该图显示了用于定义距离、方位角(θ)和仰角(ψ)的轴系统。请注意,主轴由传感器的视轴和传感器顶部形成。星号表示目标。
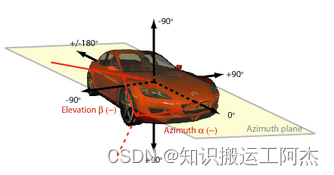
ORM入射角的定义
该图显示了用于定义α(方位角)和β(仰角)的轴系统。注:这些角度是相对于其与目标质心的入射角定义的。
TIS Nomenclature(TIS术语)
传感器带有一些非常具体的术语。此处给出了考虑TIS的最重要定义。
与传感器技术相关的定义
·离散化:将连续值替换为有限离散量的过程。该术语大部分时间与采样(离散)结合使用。对于TIS,离散化发生在空间(由于光束数量有限;如果没有光束,则没有读数)和时间(因为并非所有光束同时激活);
·误差:TIS指示的值与感测对象的真实值之间的差异,例如位置、方向等。;
·量化:将连续值替换为有限离散量的过程。该术语大部分时间与A/D转换结合使用,其中必须确定读数必须量化到哪个最接近的值。对于TIS,量化发生在将世界位置角度和距离转换为24比特数的过程中。有时,量化和离散化用于描述相同的过程,即采样过程。这里,量化指的是数量,而离散化指的是更二进制的运算类型;
·灵敏度:输出值与输入值的比率,或者一般来说,当实际存在条件时检测条件的能力;
·分辨率:可以区分和显示的最小值。注意,低分辨率导致低灵敏度;
·精度:测量值与真值的一致程度:精度=误差/真值*100%。
与系统规范/性能相关的定义
·漂移:由于安装松动、振动或环境温度影响等因素,传感器的标称位置在较长时间内发生变化。因此所有波束实际上偏离或改变预定执行,导致方位角和仰角读数漂移。传感器的秒表逻辑(如果传感器根据“飞行时间”工作原理)或频率比较(如果是FMCW雷达)中的漂移会导致距离漂移。由于漂移总是发生在照明路径的开始处,因此被照明的目标的局部入射角(因此ORM值)由于漂移而受到影响;
·噪声:噪声是检测器接收到的目标信息(信号)流中的波动和外部因素的增加。在大多数情况下,假设这仅仅是对预期操作的不希望的干扰。自然和故意噪声源可以提供随机干扰或图案化干扰。在每个波束的方位角、仰角和/或距离的测量中,噪声表现为任意随机或周期性非数据信号。取决于噪声发生的位置,即,在照明路径的起点或反射路径的起点,被照明的目标的局部入射角(以及因此的ORM值)可能由于噪声而受到影响;
·分辨率单元格:可区分和显示检测的最小单元格大小。此单元格的大小由宽度x、高度值(读取:角度方位角和仰角)和长度值(读取范围值)设置。
TIS传感器专用定义
·能量损失图:能量损失图是一种测量通往目标和返回TIS的路径上的功率损失的方法。它是照明路径和反射路径的长度以及沿它们发生的大气衰减的函数。被照明目标的反射截面(由3D查找表确定,也称为对象响应模型(ORM))在计算能量损失图时也被考虑在内。能量损失图以dBs表示;
·ORM:对象响应模型的缩写。ORM表示被照明目标的反射横截面(类似地定义为雷达的雷达横截面或简称RCS),以3D查找表的形式显示,反射横截面[dBsm]是方位角和仰角中局部入射角的函数。PreScan的默认ORM是基于雷达的,可以从文献中检索,也可以建模。它们可以很容易地用于给用户所遇到的衰减级别的感觉。有关PreScan ORM模型的更多信息,请参阅PreScan的对象响应模型;
·结果扫描频率:每束发射的频率。有关如何计算此数字的信息,请参阅TIS扫描模式。
TIS Dialog Tabs(TIS对话框选项卡)
TIS对话框有七个不同的选项卡,用于定义和配置TIS。它们在顶层提供以下主要功能:
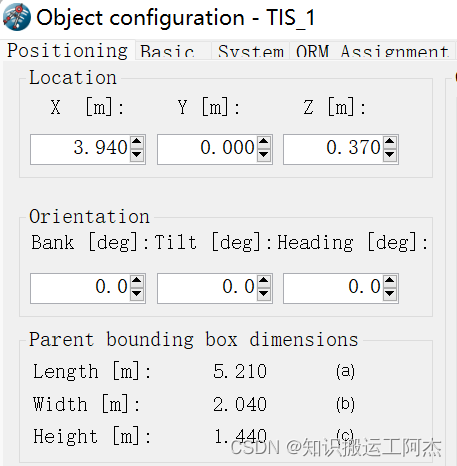
·位置选项卡:使用此选项卡,用户可以轻松定位TIS相对于演员的位置;
注1:图形表示仅在变更生效后更新。
注2:所描述的传感器波束表示可能不反映实际情况,因为波束表示仅在2D中。这意味着仅考虑2D平面中的方向变化。E、 g.在俯视平面中,仅光束的方位角方向被正确显示。如果传感器倾斜90度,则表示与传感器未倾斜时相同。在构建区域也会出现类似的情况。
注3:如果大量光束配置为相对较窄的视场,则并非所有光束都将显示在2D查看器中。经验法则是,如果FoV角度(以度为单位)是波束数量的一半或更大,则配置的波束数量都是可见的(因此,当FoV=13度或更高时,25个波束是可见的)。
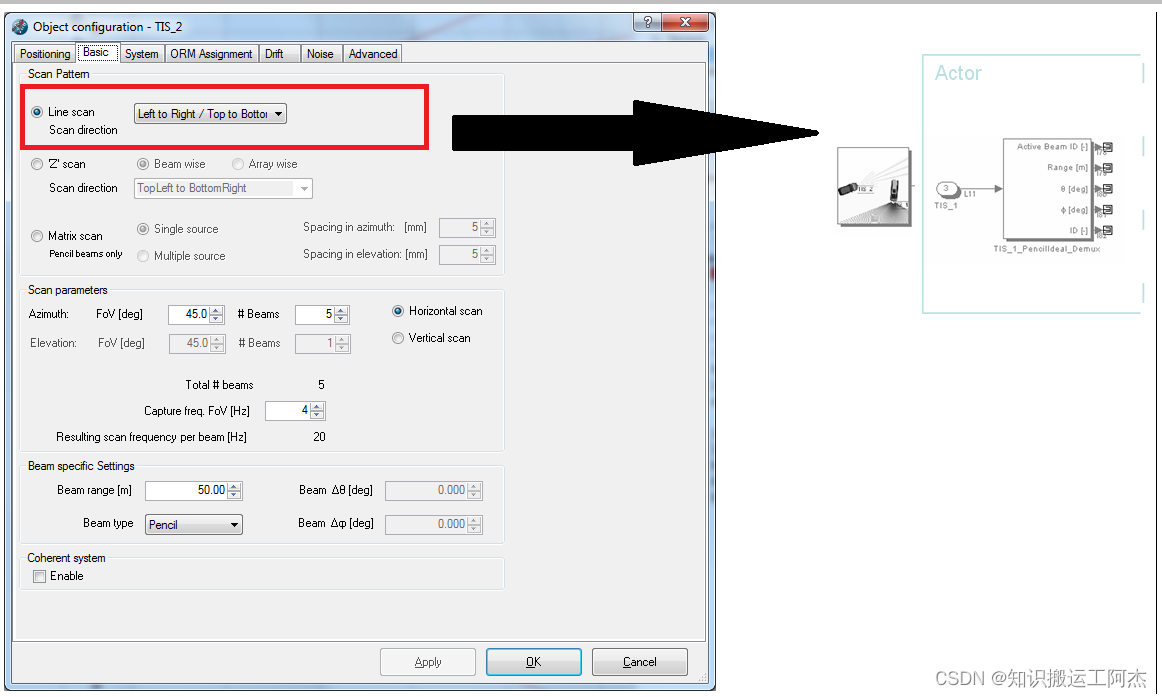
基本选项卡:这里配置了波束的设置:输入波束的数量,设置波束的方位间距和高程位置,以及波束的类型和视野(FoV)。在“高级”选项卡中,可以指定每个梁的梁梁数(梁方向)。高级用户还可以在“基本”选项卡中设置所需的扫描模式,并可以生成多普勒速度信号;
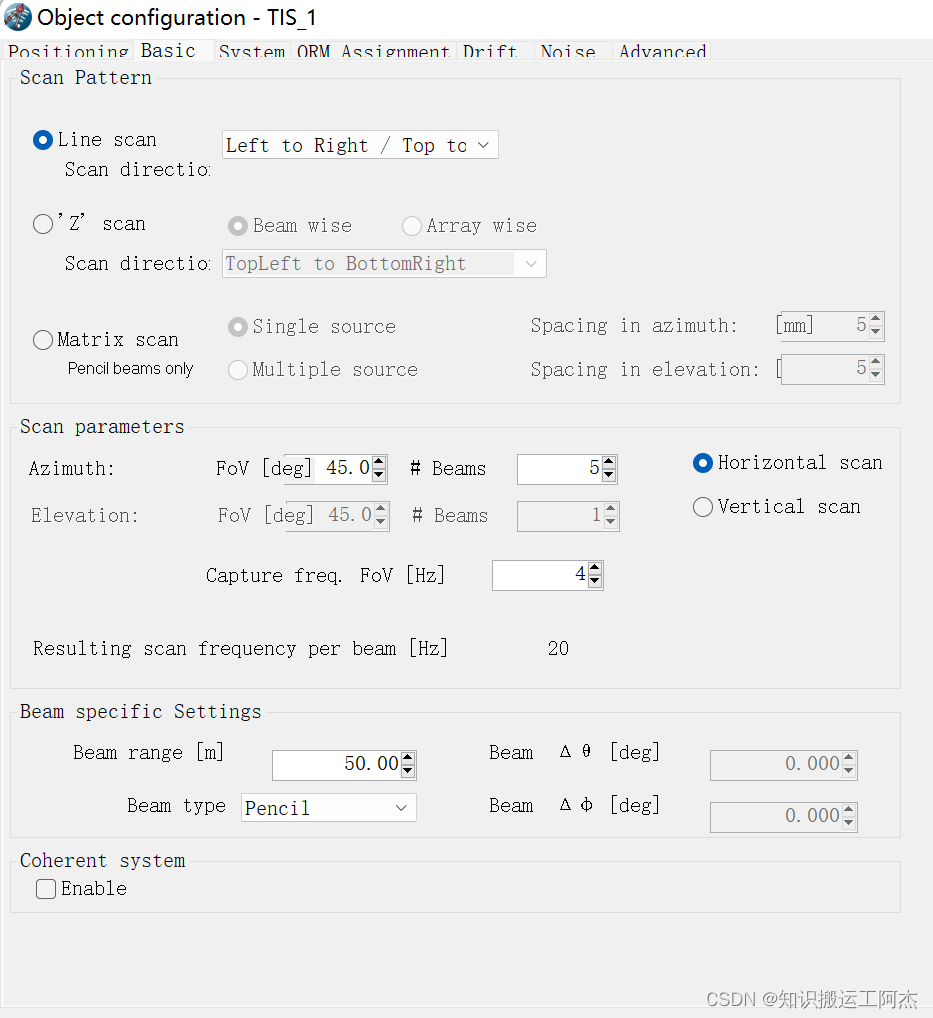
扫描模式字段用于定义行扫描、Z扫描或矩阵扫描的扫描模式。
扫描参数字段包括如下信息:
·方位角和仰角的视场(FoV):是从最终左光束外缘到最终右光束外缘测量的角度(因此不是从中心线外光束左/上到中心线外波束右/下!)。可输入的方位角值范围为0至360度。对于高程,可能的值范围为0至180度;
·方位角和仰角中的波束数:这些是整数值,用于设置所声明FoV内的波束数。请注意,所有光束的中心线将根据FoV和输入的光束数量等距分布。通过预扫描自动计算间距,可以使用“高级”选项卡覆盖一个平面中梁的位置。可以输入的值取决于输入的梁类型,可以在TIS计算限制中找到;
·水平/垂直扫描:在这里,用户可以定义扫描的方向。更多信息,请参阅TIS扫描模式;
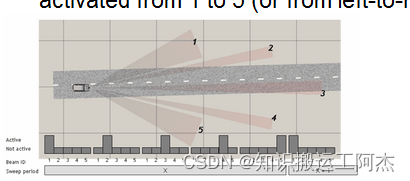
·捕获频率FoV:表示执行模式的速率。有关属于各种扫描模式的捕获频率的定义,请参阅TIS扫描模式。在行扫描的情况下,它仍然是众所周知的扫描频率。下图显示了包含5个波束的示例的扫描周期定义。在该示例中,光束从1到5(或从左到右)连续激活。如果它们应该从5向下激活为1,则扫描方向将从左向右更改为从右向左;
每个波束的最终扫描频率信息:根据所选扫描模式、方位角和仰角的波束数以及所需的捕获频率,计算最终扫描频率。有关如何计算此数字的更多信息,请参阅TIS扫描模式。
波束特定设置字段包括以下信息:
·射束范围:此处,在“基本”选项卡下为所有射束设置有效范围。可在“高级”选项卡下按射束指定范围。可输入的值范围从最小检测范围(默认为0.5米,可在“实验->常规设置->传感器”中更改)到1000米。该值也是可变的;
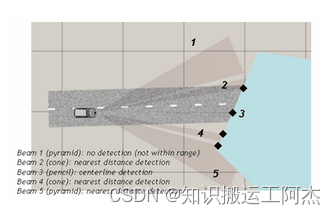
·光束类型:可以使用以下三种类型的光束照亮目标:
a) 其检测基于找到的最近距离,
b) 其检测基于找到的最近距离,
c) 椭圆锥,其检测基于找到的最近距离,以及
d) 铅笔束,其检测基于被照明的单个点。
下面的图片展示了这在实践中的含义;当障碍物(蓝色)放置在TIS前面时,它会显示各种光束的读数。黑色菱形表示为所选光束类型检索范围和角度信息的点。默认情况下,选择的梁类型为“铅笔”;
波束Δθ(方位角的波束宽度)和波束Δφ(仰角的波束高度)表示单波束的有效视场,单位为度。两种情况下输入的范围都可以从0扩展到方位角FoV/俯仰角FoV。
·相干系统:通过检查它,可以获得表示多普勒速度[m/s]的额外输出。该功能可用于模拟波束击中移动目标时的多普勒效应。
·系统选项卡:其中显示了TIS传感器使用的技术。传感器规格表中的分辨率单元大小数据可以输入此选项卡,从而量化方位角和仰角以及范围内的角度读数。此选项卡还具有字段,您可以在其中输入要检测的最大对象数;
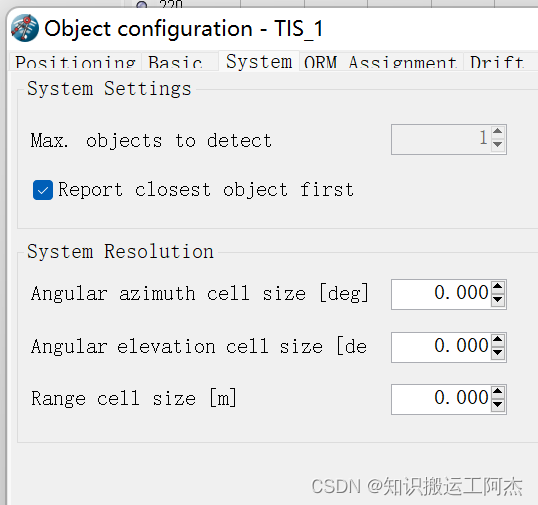
在“系统设置”字段中,可以看到两个不同的参数,即要检测的对象的最大数量(可由用户设置)和所使用的技术,这是在“ORM分配”选项卡中进行选择的结果。
关于要检测的对象的最大数量:假设单个光束可以看到多个目标。要检测的最大对象数参数限制了要生成的数据集的数量。基于最近距离考虑进行选择(但是,数据集不按距离排序)。可以输入的最大值为100。
注:当输入字段变灰(因此不允许值修改)时,这是由于用户输入面板中实现的逻辑阻止输入值。此处无法输入参数“要检测的最大目标”,因为基本选项卡中设置的波束类型为“铅笔”。从本质上讲,铅笔束只能输出一个目标的读数!
这里显示了在该参数设置为3的情况下,每个梁检测到的行人。被检测到的被红色椭圆包围。
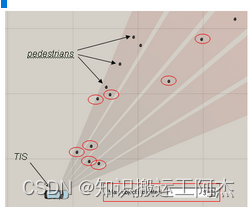
注:有时,虽然一个光束中有许多物体,但TIS传感器无法识别所有物体。当一个目标(视觉上)被另一个目标遮挡时,会发生这种情况。在样本中,跟踪部分处于光束中的红色汽车将不会被检测到!不是因为它没有完全在光束中(TIS可以处理这种情况),而是因为传感器对光束中的汽车部分的视图被遮挡。

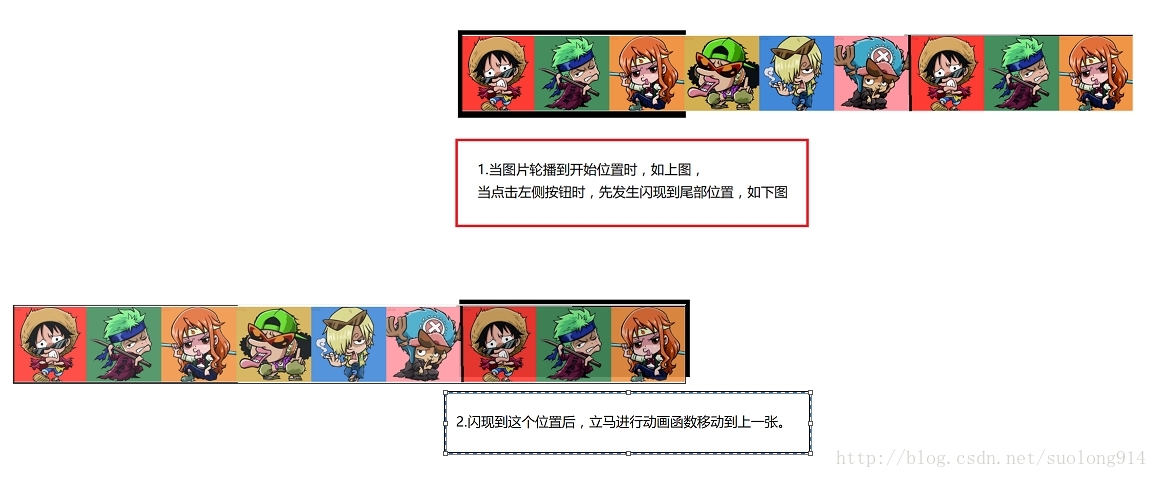
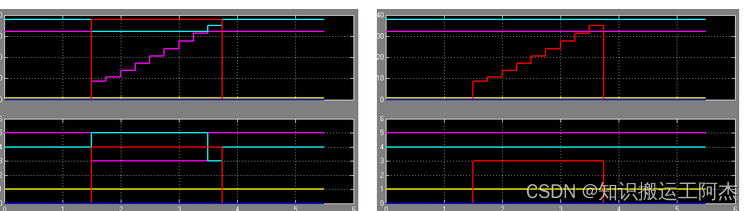
关于首先报告最近的对象:假设TIS传感器看到多个目标。如果复选框“首先报告最近的对象”处于启用状态,则检测到的对象将根据TIS输出中与传感器的距离进行排序(距离较小的对象将出现在TIS输出向量(例如,对象ID向量)的较低“槽”中)。此行为与先前的预扫描版本一致。然而,一个可能的缺点(这对于先前的预扫描版本也是已知的)是,相同的检测对象可能在不同的输出向量时隙之间反弹。如果在MATLAB Simulink范围内可视化,同一对象可能会在不同的输出信号之间反弹,如下图左侧所示(顶部:检测到的对象范围;底部:对象ID)。当“首先报告最接近对象”复选框处于禁用状态时,输出将不排序,检测到的对象将保留在相同的输出槽中。如下图右侧所示。
当前预扫描版本中的默认值为启用。
注意:在未来的预扫描版本中,报告最接近对象优先复选框的默认值可能会更改为关闭!
关于此选项卡的“系统分辨率”字段:分辨率单元是空间中的体积,这些体积在任何一刻都会导致TIS接收到回波:在单个分辨率单元内,所有检测到的对象都聚集在一个量化读数中。分辨率单元存在于距离方向、方位角和仰角。下一张图片显示了距离和方位角分辨率有限的影响(此处未描述仰角情况,但与方位角情况类似):尽管两个目标(θ4/R4和θ1/R4)在物理上位于不同的位置,但它们都将被分配到范围R4。当然,它们在方位角上具有不同的探测角度(在本例中为θ1和θ4)。
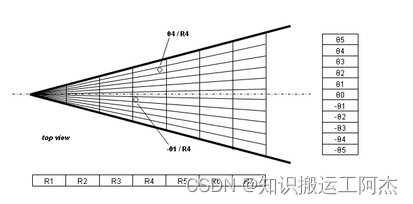
为角方位单元尺寸输入的值的允许范围为0到1.0*(所有波束方位角的最小波束宽度),角仰角单元尺寸的范围为0至1.0*(所有波束仰角中的最小波束高度),距离单元尺寸的允许范围是0至1。默认情况下,它们都设置为0,表示根本没有量化行为。
·ORM分配选项卡:此选项卡将可用的对象响应模型和分配给任何参与者的对象响应模式连接到正在配置的TIS。每个对象响应模型都应该针对特定的技术,如雷达或激光雷达。这些对象响应模型(ORM)是用户自制的,但一些标准模型——默认情况下是基于雷达技术的——已经被纳入;
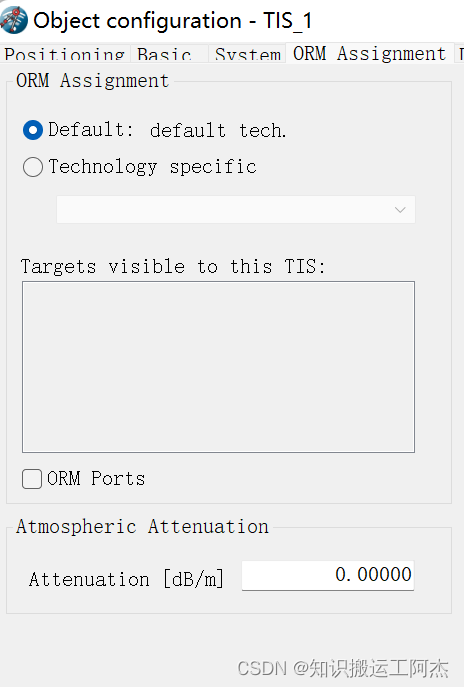
ORM分配选项卡用于将目标(通过所谓的对象响应模型或简称ORM)链接到用户定义的TIS配置。
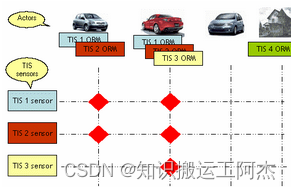
这个想法在上面的图片中有描述。在最上面一行,我们看到了一个实验中的各种演员。左栏显示了同一实验中定义的各种TIS传感器。第一个参与者——丰田Yaris——获得了两种不同类型的ORM模型,一种可由TIS使用技术“1”检测,另一种可通过TIS使用“2”检测。第二个参与者-马自达RX8-有三种不同的ORM车型,因此,TIS 1、2和3可以看到。雪铁龙C3完全没有ORM。这意味着任何可用的TIS传感器都无法看到它。当然,可以为雪铁龙C3分配默认ORM模型,但仍应存在能够识别该模型的TIS传感器(默认情况下,他们都可以:如果您将TIS传感器拖放到PreScan的构建区域,他们会自动调整默认ORM模式)。老房子有一个TIS 4 ORM,但由于没有TIS 4技术,所以现有的任何TIS传感器都看不到这个角色。您可以使用“实验->报告->传感器”选项轻松地对自己的实验进行概述。
关于将ORM分配给参与者:每个对象(或参与者)都有一个类似于下面描述的对话框。使用传感器属性选项卡,用户可以指定任何ORM、默认或用户定义。默认情况下,对象的默认ORM始终存在,但可以删除此模型并用用户指定的模型替换。重要的是要注意技术的名称;此名称用于显示和过滤现有技术。此处描述的标签属于奥迪A8的对象配置。分配的技术(读取:可以看到该对象的TIS传感器类型)被命名为“MyScanner”。
当查看TIS配置选项卡时,我们看到两个不同的东西,即a)将该TIS连接到Box_1的可能性,以及b)一旦选择,该技术的名称将出现在其系统选项卡中。
关于ORM Assigment选项卡中的大气衰减字段:在TIS的ORM Assignment选项卡中,我们还可以输入大气衰减的数字。天气设置不会自动影响结果。用户应通过衰减值模拟天气影响。
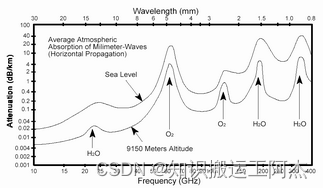
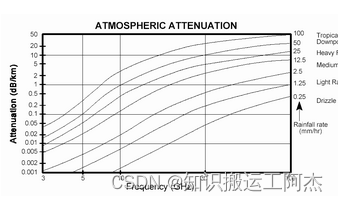
除了传输损耗(雷达的典型示例包括:功率传输效率、波导和天线损耗以及双工器损耗)和接收器损耗(雷达典型示例包括天线、波导、射频放大器、混频器和中频放大器损耗)之外,通过大气层的能量受到大气衰减的影响,大气衰减主要是由气体吸收引起的。对于较低频率(低于10 GHz),衰减是可以合理预测的。对于毫米波范围内的高频,衰减不仅增加,而且更加依赖于H2O、O2等的特殊吸收特性。下图显示了毫米波频谱中的峰值吸收面积[参考5]。
该图[参考文献5]显示了降水强度如何影响大气衰减。所见示例适用于雷达。
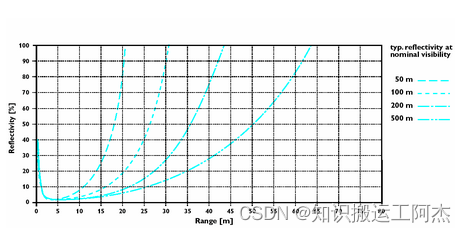
本示例适用于典型的激光雷达系统[参考文献4]。注意给定反射率水平的检测范围如何受雾影响(读取:在不同的标称能见度范围)。
注:在“ORM分配”选项卡中选择ORM端口可为用户提供Simulink中以dB表示的能量损失和物体入射角的输出。
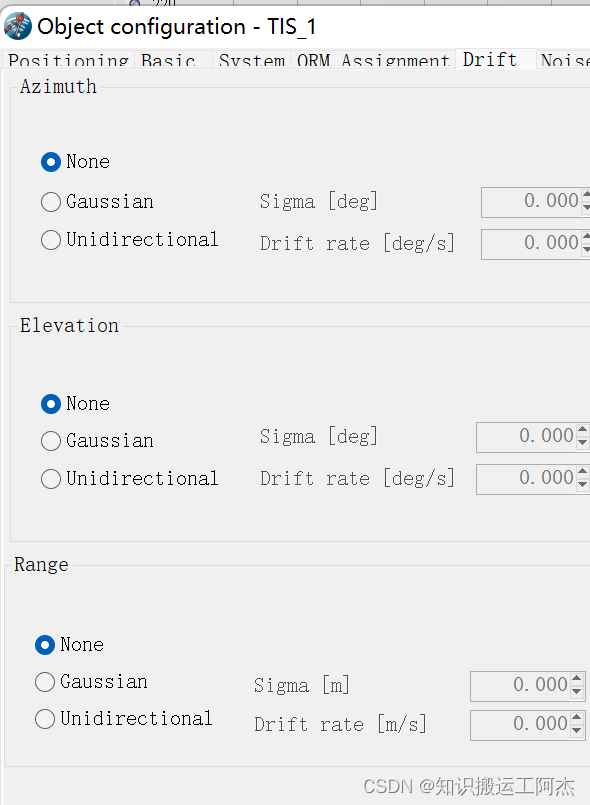
·漂移标签:漂移可应用于传感器的位置和范围解释算法。可以选择单向漂移和高斯分布漂移模型;
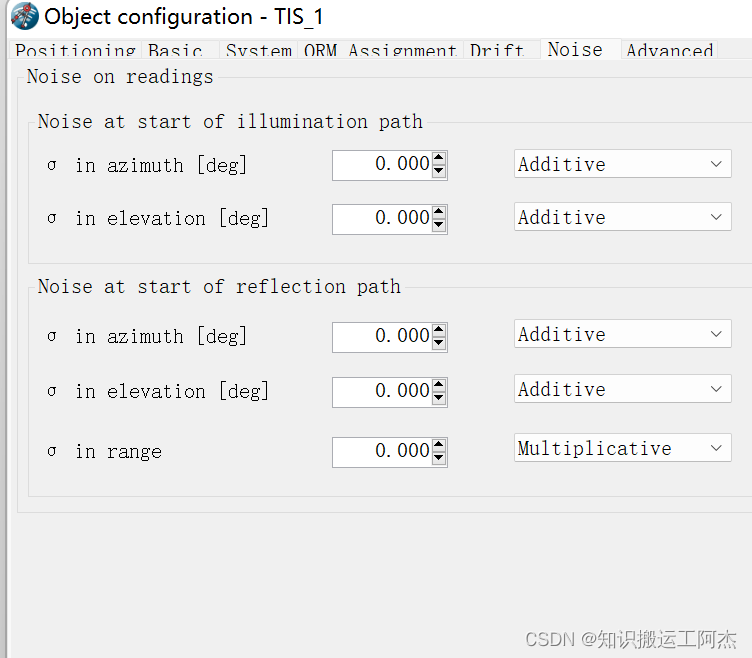
·噪声选项卡:(高斯)噪声可应用于每个波束位置和距离解释算法;
有关噪声和漂移的定义,请参考TIS术语。实践中的基本区别如下所示:
注意,在漂移的情况下,读数Θ、Φ、R、α和β在一次扫描中确实相互关联(注意,能量损失数字并非由于方位角和仰角的高度非线性响应),而在噪声情况下则不相关。演示TIS漂移和噪声中显示了所看到的各种效果。
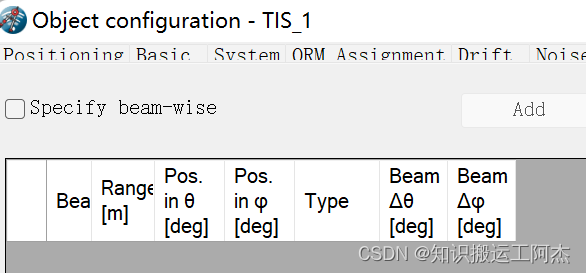
在漂移选项卡中,可以输入高斯和单向漂移类型。当然,您不需要输入高斯漂移的平均值,因为这与每个光束的光束位置一致。
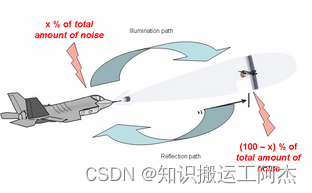
在“噪波”选项卡中,可以输入类似的信息。此选项卡与漂移选项卡之间的一个明显区别在于,您可以定义要分配给照明路径起点(‘x%’)的噪声量,以及要分配给反射路径起点(‘100-x%’)。此外,可以选择加性或乘性噪声叠加方法。
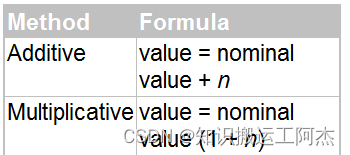
其中噪声项n是具有标准偏差σ的零平均高斯(“正常”)分布值。
·高级选项卡:在这里可以输入每个梁的配置和设置,同时可以覆盖基本选项卡设置的值。
高级选项卡通常用于覆盖基本选项卡中定义的统一配置。为此,需要选中“波束方向”复选框。选中后,可以添加和删除自己的梁定义。“重新排序”按钮对输入的波束配置进行重新排序,使其以增加方位角的顺序显示。请注意,“高级”选项卡还允许您定义不同立面角下的梁。
此处显示的示例涉及具有Z扫描阵列定义的TIS。请注意,要编辑的阵列存在选择框。
注1:第2列和第3列中提到的位置是梁中心线的位置。
注2:实际数字的存储和处理比显示更精确(在GUI中限制为3位小数)。
注3:只能手动覆盖行扫描模式的光束位置(因此重新排序)。这不是一个bug,而是一个概念上的限制:想想如果您可以在仰角或方位角自由定位波束会发生什么。这将破坏数组或幻灯片的定义,甚至导致数组大小不同。
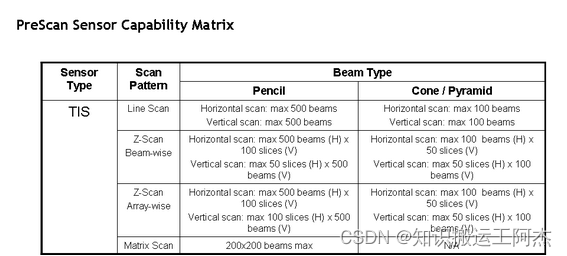
TIS Scan Patterns
PreScan提供三种基本扫描模式,即。
·行扫描模式:这是最常用的模式,其中连续发射光束并捕获信息。存在两种基本操作模式,即水平和垂直线扫描模式;
·Z扫描模式:这是一种鲜为人知的扫描模式。Z扫描是一种更复杂的扫描形式。Z扫描允许用户将光束扫过物体,就像电视角色佐罗将小花剑扫过潜在受害者一样。这里还存在两种基本操作模式,即光束Z扫描和切片Z扫描;
·矩阵扫描模式:矩阵扫描可以与使用PC屏幕捕获工具捕获图像进行比较:在用户指定的捕获频率下,捕获整个图像并检索信息。当然,这些信息不是bmp图像中的信息(RGB值),而是特定的TIS信息,例如方位角(θ)和仰角()。
The following picture illustrates the differences between the various scan patterns for each capture period.
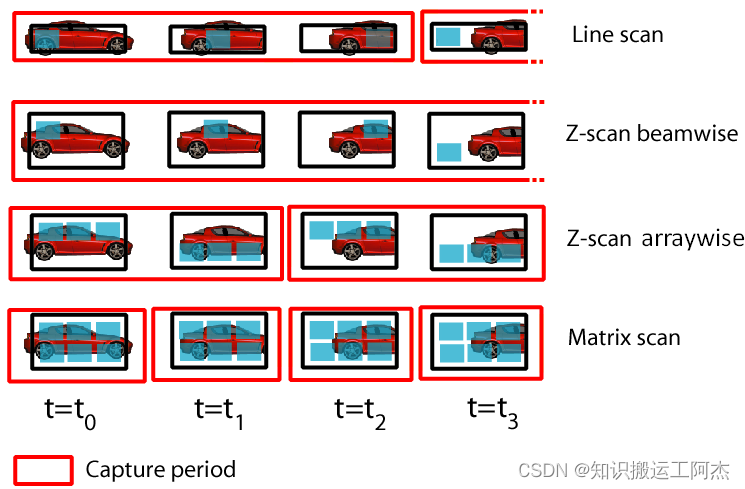
还请注意捕获周期的差异(在这种情况下,检索整个视图的时间是一辆向右移动的汽车):对于波束式Z扫描操作模式,它超出了图片范围(需要3X2=6个离散时间步长,而仅显示4个),对于阵列式Z扫描,它需要2个离散时间步骤,而矩阵扫描可以在一个时间步长内捕获整个区域。
行扫描
行扫描内有两种基本操作模式,即水平行扫描模式和垂直行扫描模式。这两个问题都将在这里解释。请注意,水平线扫描模式从左到右或从右到右运行,而垂直扫描模式从上到下或从下到下运行。
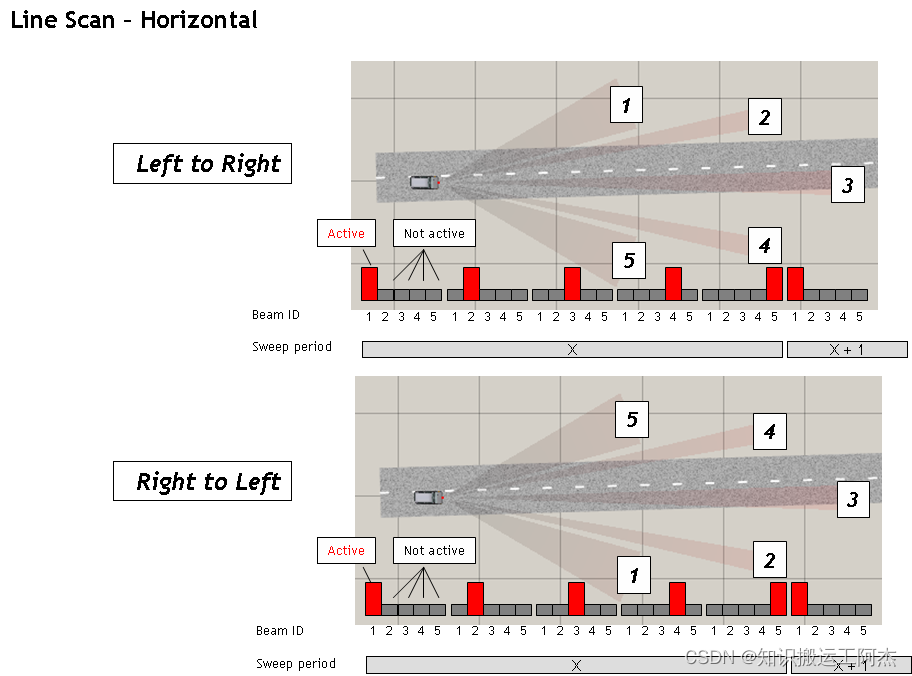
Note that the beams don’t necessarily have to be in one plane! In this overview beam 3 could be looking slightly up or down compared to beams 1-2 and beams 4-5. The offsets for beam 3 are to be given in the TIS’ Advanced tab.
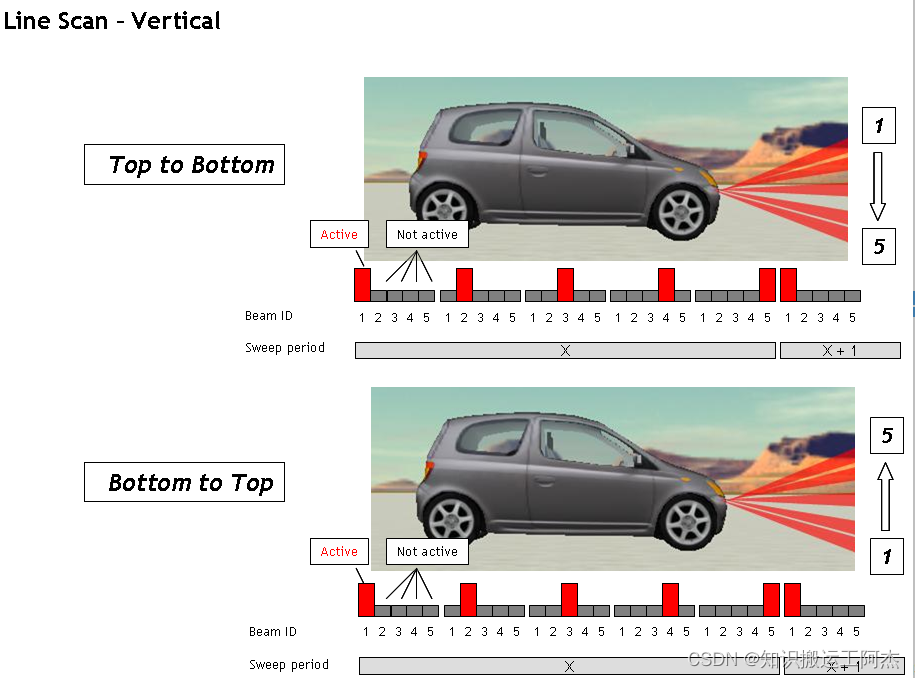
Note that the beams don’t necessarily have to be in one plane! In this overview beam 3 could be looking slightly offset in depth compared to beams 1-2 and beams 4-5. The offsets for beam 3 are to be given in the TIS’ Advanced tab.
注意,梁不一定必须在一个平面上!在本概述中,与梁1-2和梁4-5相比,梁3在深度上可能略微偏移。梁3的偏移将在TIS的“高级”选项卡中给出。
汇编表外观
属于此配置的典型编译表表示如下:
Note that the beams don’t necessarily have to be in one plane! In this overview beam 3 could be looking slightly offset in depth compared to beams 1-2 and beams 4-5. The offsets for beam 3 are to be given in the TIS’ Advanced tab.
Z扫描
Z扫描是一种更复杂的扫描形式。Z扫描允许用户将光束扫过对象。
在目标上扫描光束可以通过两种方式进行,即:。
·通过在Z上连续发射波束(波束模式),或
·通过一次连续获取由多个波束组成的切片(阵列模式),覆盖Z。
Z扫描波束
与线扫描一样,存在两种基本操作模式,即水平和垂直波束扫描模式。这里将对这两种情况进行说明。
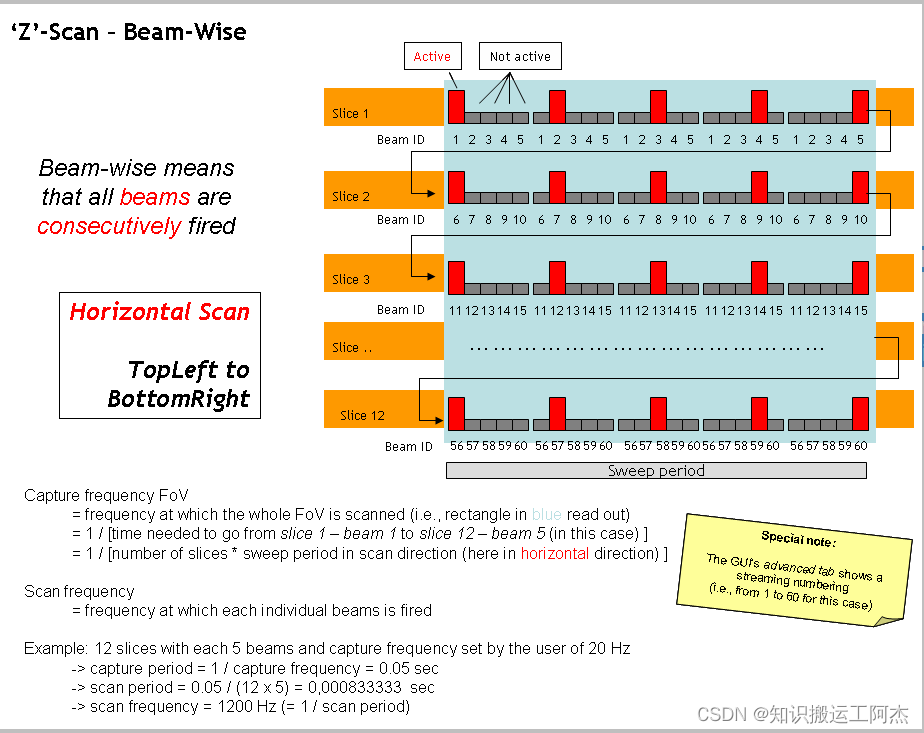
横
下图显示了Z模式中的波束扫描原理。注意,所有光束都是连续发射的。还请注意,捕获频率的定义是扫描整个FoV的频率(即,读取蓝色矩形)=1/[扫描方向上的“切片数”*扫描周期]。最后请注意,对于这种情况,GUI的高级选项卡将显示连续编号(在本例中为1到60)。
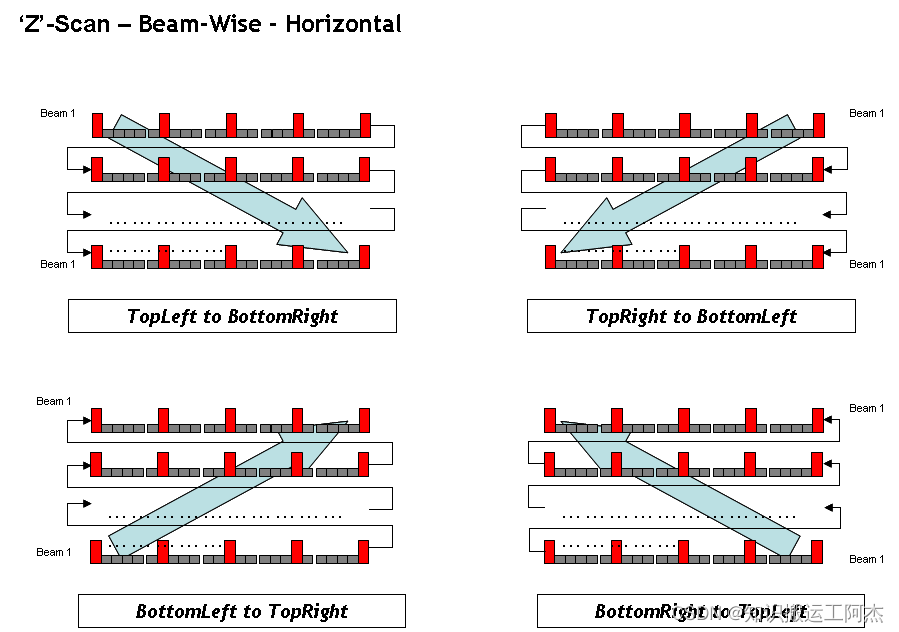
The following picture illustrates the target illumination paths for each specific direction that can be entered.
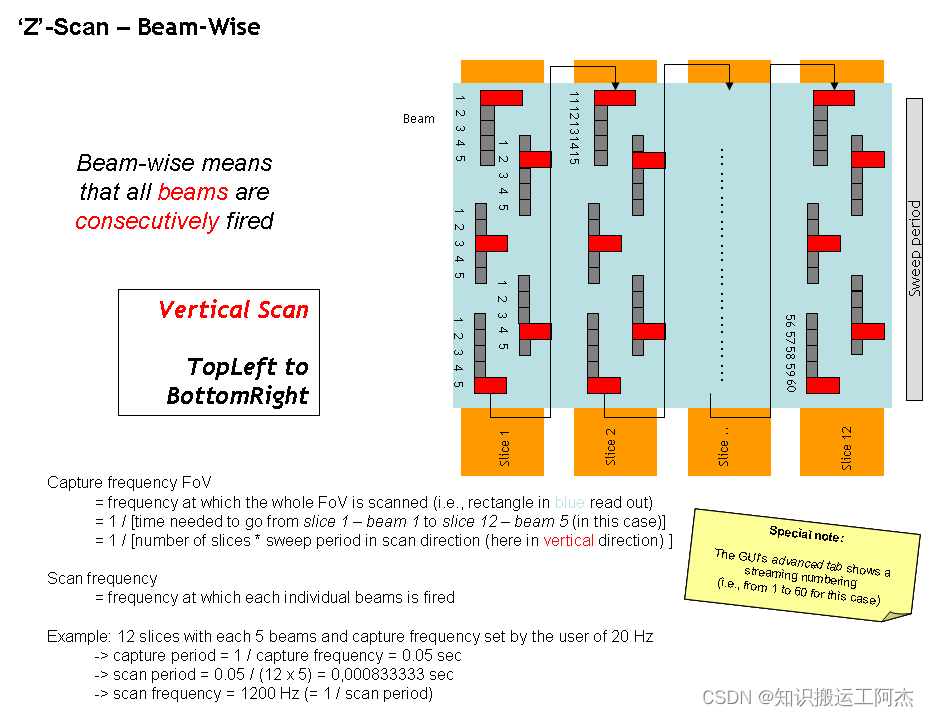
垂直地
除了水平执行Z扫描外,我们还可以垂直执行Z扫描。下图显示了Z模式中的波束扫描原理。请注意,所有光束都是连续发射的。还请注意,捕获频率的定义是扫描整个FoV的频率(即,读取蓝色矩形)=1/[扫描方向上的“切片数”*扫描周期]。最后请注意,对于这种情况,GUI的高级选项卡将再次显示流编号(在本例中为1到60)。
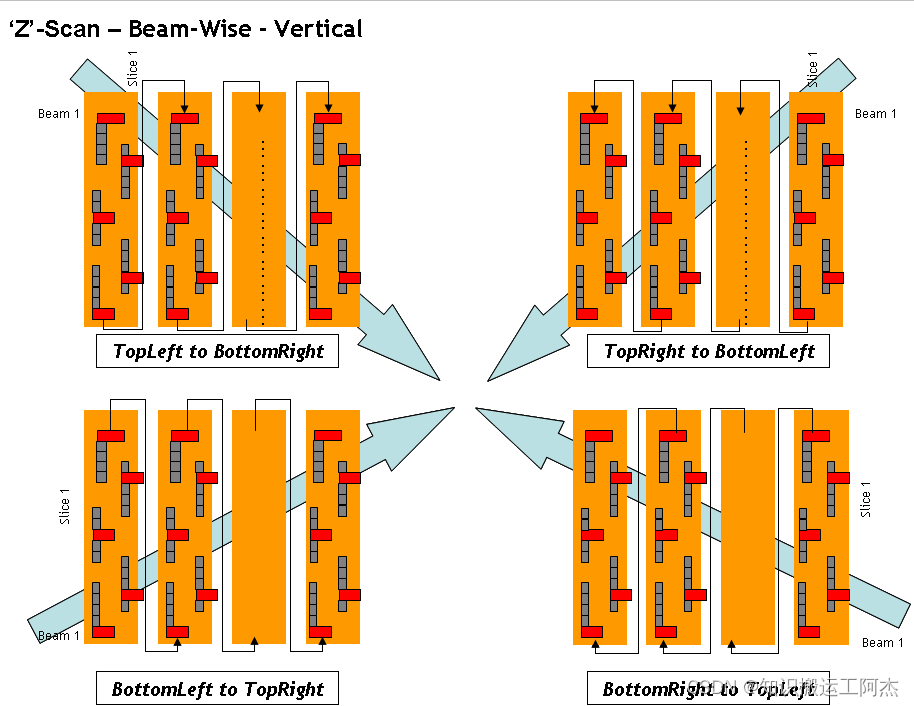
The following picture illustrates the target illumination paths for each specific direction that can be entered.
汇编表外观
属于此配置的典型编译表表示如下:
矩阵扫描
矩阵扫描可以与使用PC屏幕捕获工具捕获图像进行比较:在用户指定的捕获频率下,捕获整个图像并检索信息。当然,该信息不是bmp图像中的信息(RGB值),而是特定的TIS信息,如方位角(θ)和仰角(ψ)等。
矩阵扫描操作如下所示:
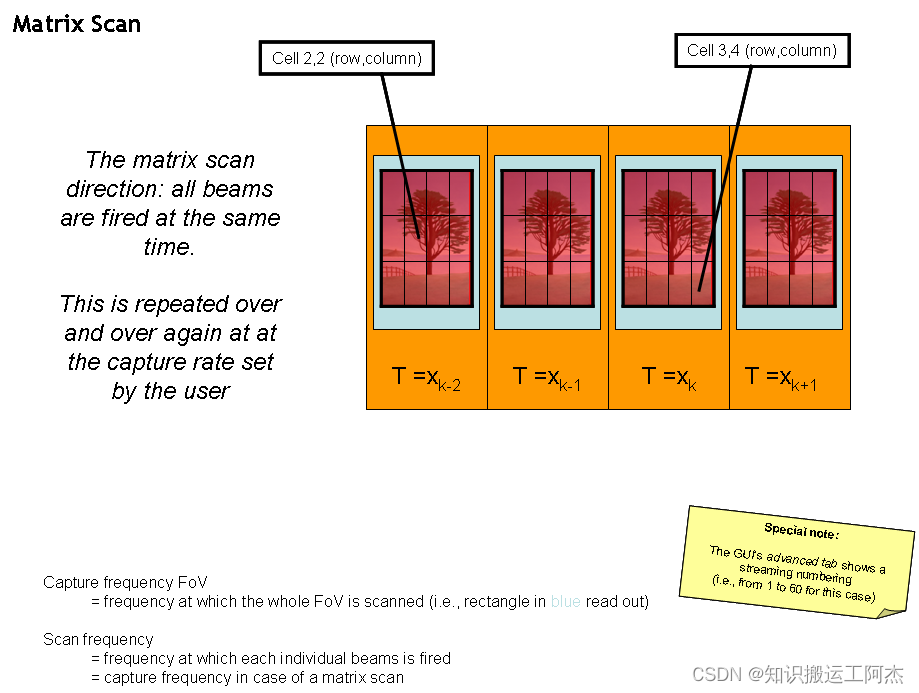
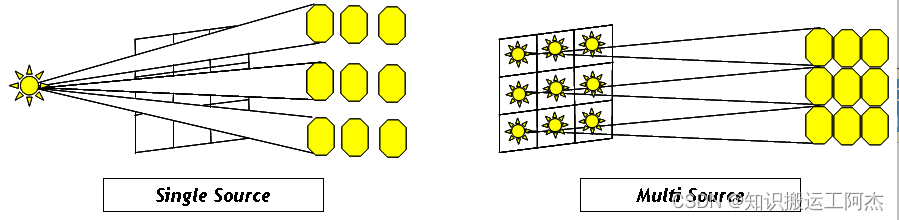
注:矩阵扫描模式使用单个源。换句话说:所有光束都从一个点发射。没有一个单元有自己的波束源。因此,光束以这样的方式发散:外部单元位置被定义的FOV(方位角和仰角)覆盖。请参阅下图,说明单个源的情况。注意,光束会发散!
Note: In the matrix scanning mode you can only use pencil beams by default!
TIS Computational Limitations(TIS计算限制)
TIS使用实际几何信息。此处显示了马自达RX-8的实际啮合(“多边形”)示例。TIS检测到的正是这些多边形。
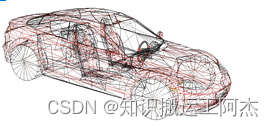
扫描由多边形组成的实际几何体,再加上大量光束或高扫描速率,可能会导致大量计算负担。这里给出了一些例子来说明这种情况。
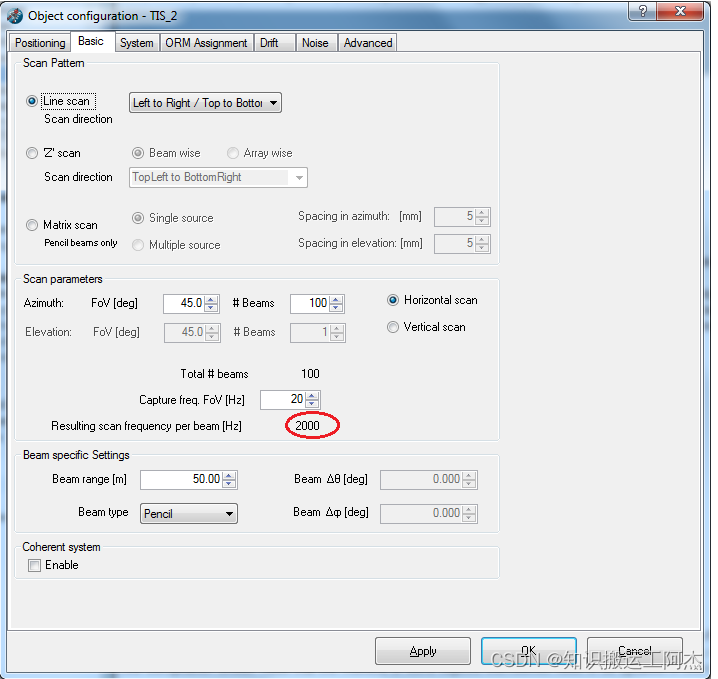
示例1:假设选择了具有100个锥形光束的线扫描TIS,扫描速率为20 Hz(见下图)。要在编译表中实现并输出数据的ORM端口已设置为最多5个目标。这意味着在PreScan中,每秒必须读取20 x 100=2000束光束,每束光束包含8个参数的数据集(光束ID、射程、方位角和仰角的探测角度、检测到的目标的数字ID、传感器光束照射目标的局部入射角以及能量损失图),最多5个目标,导致数量巨大:2000 x 5 x 8=80000在汇编表中更新的每秒读数或计算值!请注意,世界对象本身的运动需要以2 kHz的速率更新!
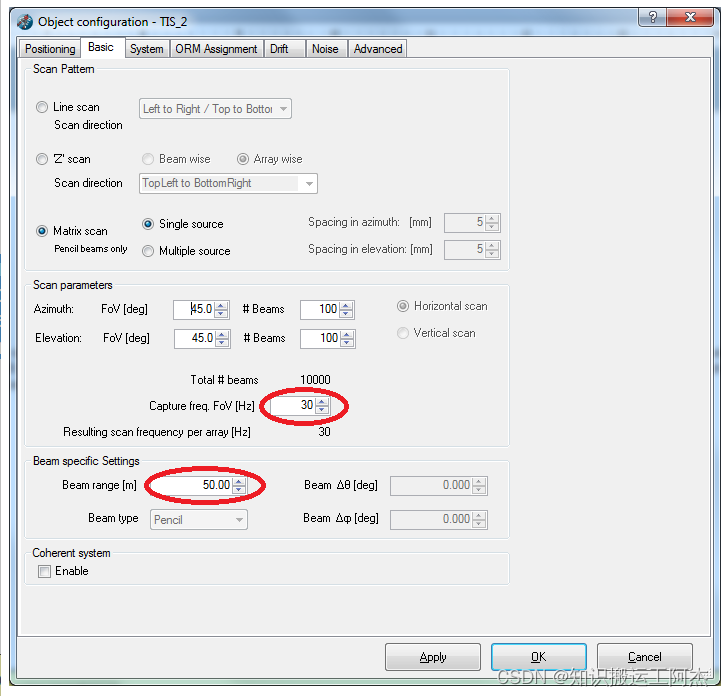
示例2:假设选择了一个矩阵扫描TIS,其方位角为100束,仰角为100道,扫描速率为30 Hz(参见下面的图片;注意,您只能为矩阵扫描模式选择铅笔束!)。现在ORM端口未生效,输出限制为最多3个目标。PreScan必须每秒读取100 x 100 x 30=300000个波束,每个波束包含5个参数的数据集(波束ID、射程、方位角和仰角的探测角度、检测到的目标的数字ID),每秒最多可读取1500000个读数或计算值,并在汇编表中更新!请注意,在这种情况下,世界对象本身的运动需要以30 Hz的频率更新!
注意:PreScan的计算性能非常容易受到以下设置的影响(按重要性递减顺序):
·每次捕获的波束数(铅笔波束、锥形波束和金字塔波束)是方位角和仰角波束数以及扫描模式的函数。基本机制当然是束流激活频率;
·捕获频率:基本机制当然是世界运动更新率;
·对于锥形和锥形梁:梁Δφ(和梁Δθ)。根本机制是需要扫描的有效领域;
·设置最大检测目标:潜在机制与传感器世界中信息包数量的形成有关;
·ORM端口的生效:底层机制再次与发送到编译表的信息包数量相关。
·FoV公司。如果传感器的FoV in(方位角x仰角)较大,32位系统可能会阻塞。如果需要具有较大FoV或大量TIS传感器的传感器,建议用户使用64位系统。
建议您思考一下您想要通过实验实现什么:对于正常的控制器开发练习,使用AIR传感器可能就足够了,如果不足够,使用单光束FoV的TIS可能就可以很好地完成这项工作。请注意,完全配置的多波束TIS通常仅用于传感器数据处理算法的开发和验证,即结合或不结合跟踪和跟踪算法。
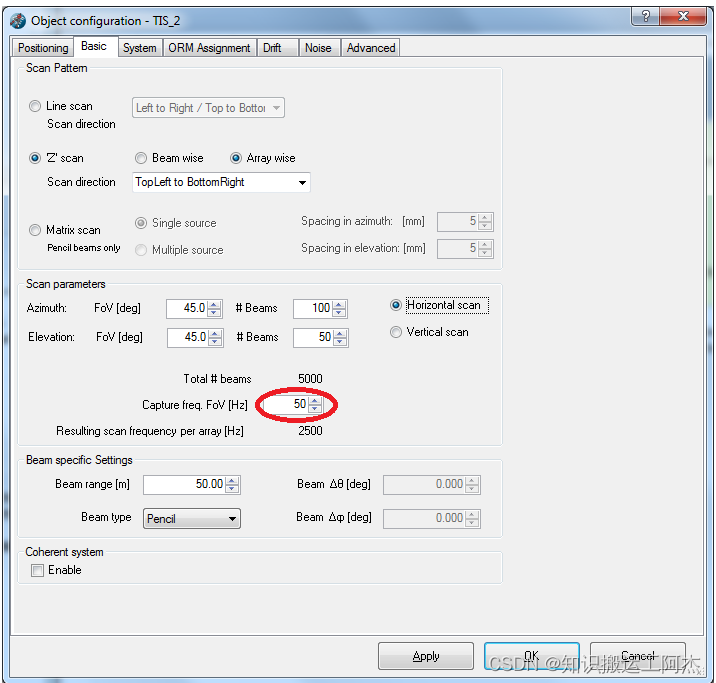
示例3:最后一个示例在用户感知方面似乎不那么严格,但实际上并非如此。假设您选择了带光束捕获的Z扫描模式。总共选择了100个方位波束,总共选择了50个仰角波束。再加上50 Hz的捕获频率,导致扫描频率惊人地达到2500(见下图)。请注意,世界运动也必须以这种速度更新!
由于所见的高计算负担,我们将各种TIS配置的最大波束数限制为以下值:
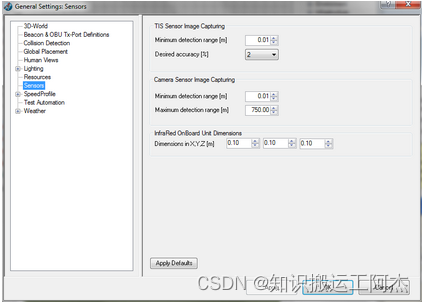
TIS Accuracy(TIS Accuracy)
TIS可以在不同的精度级别下工作,可以在PreScan的实验->常规设置中设置。将出现一个对话框,如下面的对话框,其中可以设置5%到0.5%的不同精度级别。对于距离和探测角度,对精度的解释是不同的。
·设r为检测对象的真实距离,Δr为距离误差。将精度设置为值a意味着|Δr/r|≤ 一
·设θmax为所有TIS光束的最大方位FoV,Δθ为方位探测角误差。将精度设置为值a意味着|Δθ/θmax |≤ a、 高程检测误差的定义类似。
其中,|·|是绝对值运算符。默认情况下,PreScan的TIS精度设置为2%。
注1:将所需精度提高2倍,例如从2%提高到1%,将需要(2/1)2=4倍的计算时间。因此,将最差可能的5%精度更改为最佳可能的0.5%精度将使计算时间增加一倍(5/0.5)2=100!如果确实需要高精度,建议给出好的想法;我们不应忘记,在PreScan的模型中,可达到的最佳精度仍然受到表面细节水平的限制(读:面数及其与真实车辆或任何其他参与者的正确对应)!
注2:由于准确性,一些“检测到的”对象可能会在误差范围内丢失。由于物体较小,因此TIS的轮廓较小,这也意味着它们的表面积较小。具有较小的表面积和较低(足够)的反射率贴图可能会导致反射能量低于精度阈值,在这种情况下,无法看到物体。经验表明,将精确度设定为0.5%几乎在所有情况下都可以显示物体,而5%的精确度只显示最大的物体。
Sensor Assignment(传感器分配)
介绍
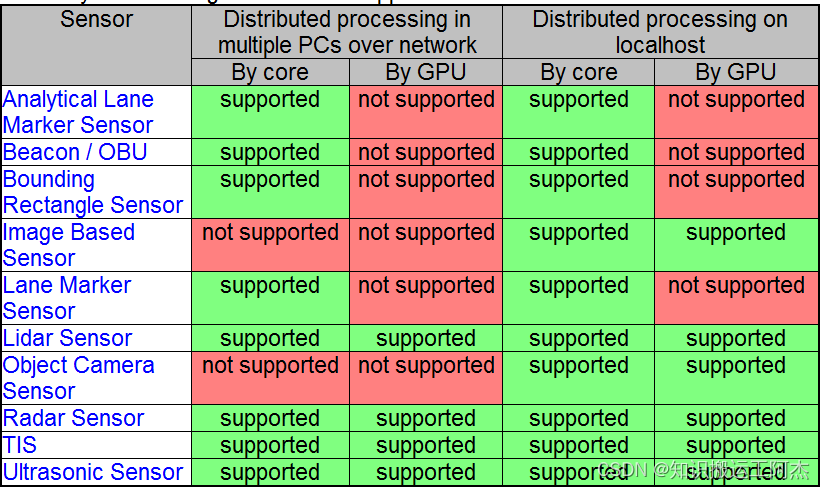
为了提高模拟性能,我们允许某些传感器在多台机器上运行。为此,可以将这些传感器分配给运行PreScan远程执行部署代理(即PreScanStart.exe)并与主机连接到同一网络的特定本地/远程计算机。
Currently the following sensors are supported
可通过以下方式配置分配表:
a) PreScan的主窗口实验->常规设置->传感器分配->{Sensor}
b) 右键单击PreScan GUI->{sensor}分配配置中创建的传感器。
Note: Image Based Sensor includes Camera Sensor, Fisheye Camera Sensor, Depth Camera and Image Segmentation Sensor
分配
每个配置对话框的内容可能因所选传感器而异。
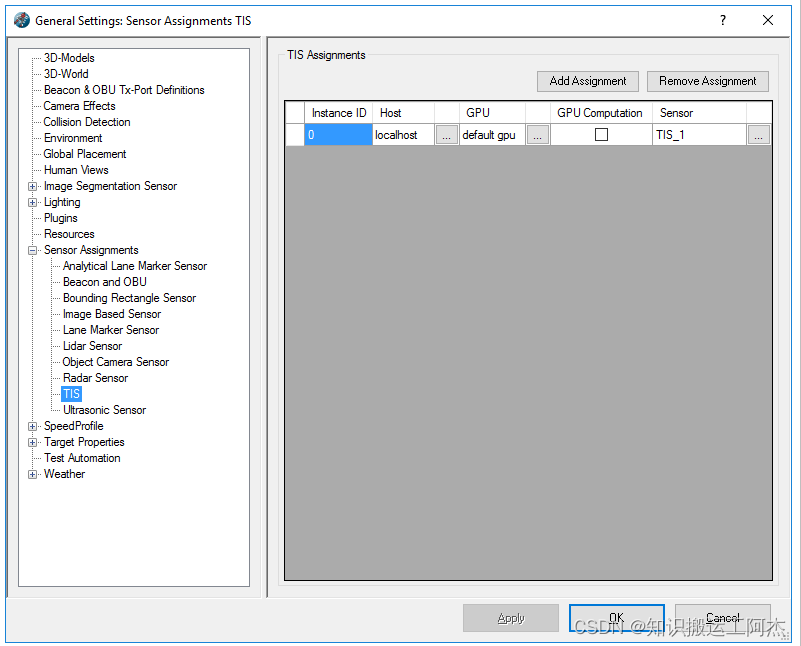
随后将出现一个对话框,其中包含一个分配表,可以在不同的列中设置分配的不同参数:
·“实例ID”是将在目标计算机上运行传感器的进程的ID。
·“主机”是将执行传感器计算的目标计算机的名称。您可以通过直接在“主机”单元格中键入或单击右侧的按钮并在弹出的列表中选择适当的主机来设置主机名。默认值为“localhost”。
·“GPU”是将渲染传感器的目标计算机上GPU的id。您可以通过直接在“GPU”单元格中键入或单击右侧的按钮并在弹出的列表中选择适当的GPU来设置GPU id。
默认值为“default gpu”,这意味着默认情况下操作系统选择的gpu。其他有效值为:{0,1,…,N-1},表示目标计算机中安装的第1个、第2个、…,N个GPU。[注1]
·“GPU计算”是打开/关闭GPGPU加速计算的开关(例如,使用OpenCL/CUDA)。默认情况下,此选项处于禁用状态。如果该选项处于启用状态,模拟将尽力使用GPGPU加速。[注2]
·“传感器”是为此特定任务选择的传感器。
注1:只有离散图形卡上的AMD/ATI和NVIDIA Quadro GPU才能用于TIS GPU分配。更具体地说:
·CPU内部集成的GPU未显示在GPU列表中;
·NVIDIA GeForce GPU不支持GPU关联,因此它们也未显示在列表中;
·对于要由GPU分配检测和使用的AMD GPU,每个GPU必须连接到监视器;
·在安装了AMD和NVIDIA离散GPU的混合系统(非常罕见)的情况下,仅列出其中一家供应商的GPU。
注2:在以下情况下,GPGPU加速将在模拟期间停用:
·目标机器上的硬件/软件平台不支持GPUGPU加速所基于的标准(例如OpenCL);
·对于AMD GPU,GPU分配不是“默认GPU”。由于已知的AMD驱动程序问题,非默认GPU分配设置有效地禁用了AMD GPU上的GPGPU加速。
·TIS光束分辨率(光束“看到”的图像的2D分辨率)小于512x512(因为较小的光束分辨率不太可能从GPGPU加速中受益)。
TIS波束分辨率取决于FoV和精度设置。下表显示了不同FoV/精度设置的一些示例,以及假设正方形视图(即高程FoV=方位角FoV)时产生的波束分辨率。例如,如果精度设置为0.005,则FoV必须大于81度才能激活GPGPU加速度。
Note 3: Multiple sensors can be assigned to the same instance, and they must be separated by semicolons in the ‘Sensor’ field
分配表中的每一行都用作分配条目,将选定的传感器分配给目标主机的GPU。单击顶部的“添加分配”按钮可以添加新的分配条目。每个列的默认值(如上所述)将应用于新添加的条目。只有一个例外:如果存在未分配传感器,则“传感器”字段将自动填充未分配传感器;否则它将是空的。此外,通过先选择一行或多行,然后单击表顶部的“删除分配”按钮,可以从表中删除条目。单击底部的“确定”按钮可以保存传感器分配。
Assignment Validity Check
由于网络中主机和/或GPU的可用性在分布式计算环境中动态变化(例如,机器连接/断开连接),现有主机/GPU分配可能会在运行中变得有效/无效(这也适用于具有过时传感器分配的现有实验打开时)。此外,用户可以直接在表中键入和/或从弹出对话框中选择可用主机/GPU/传感器列表。因此,有必要不断验证表格内容。因此,GUI会探测环境,动态识别赋值表中的无效内容,并使用红色文本突出显示它们。
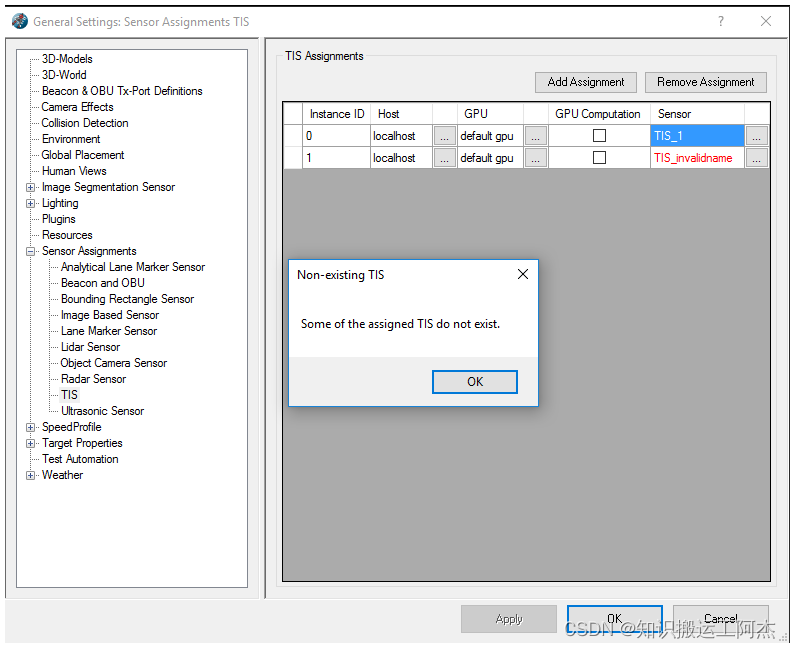
传感器名称无效
目前,用户可以直接在“传感器”字段中键入;但是,用户有责任确保键入的每个传感器名称有效。GUI将在表中标识无效的传感器名称,如果检测到,将不允许用户保存分配,如下例所示:
Invalid hosts/GPUs
In case of invalid hosts/GPUs, a warning dialog will pop up, if the ‘OK’ button is clicked:
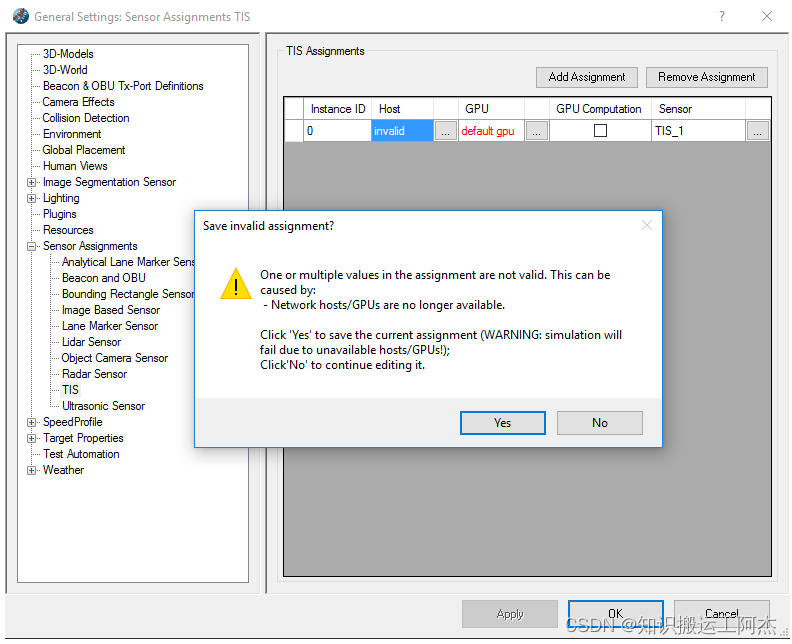
您可以在弹出的对话框中单击“是”保存(当前)无效的传感器分配,或单击“否”返回编辑无效条目。请注意,不可用的主机/GPU将导致模拟失败。因此,在开始模拟时,请确保分配有效。
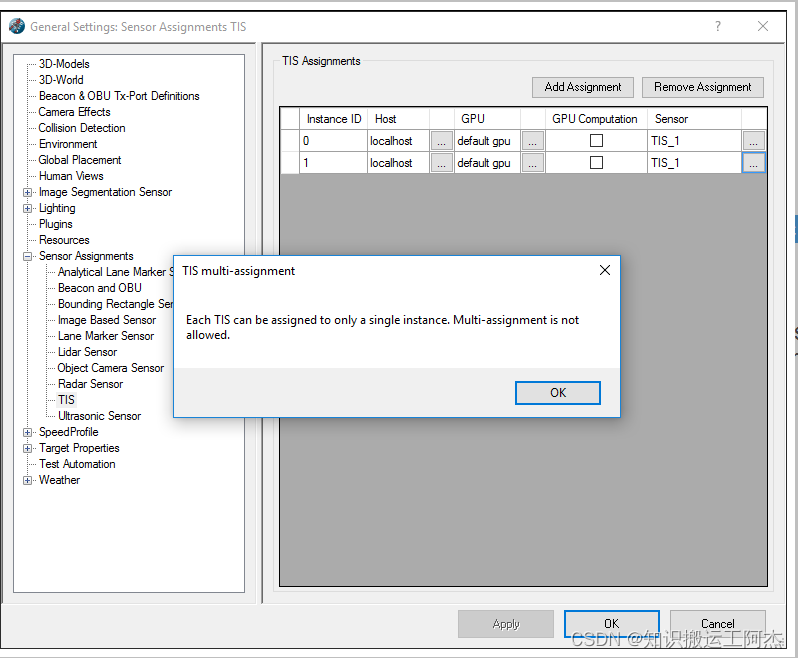
传感器多重分配
目前不支持多分配(即将单个传感器分配给多个分配条目)。因此,用户有责任确保每个传感器在表中只分配一次。GUI将检测多个分配,如果已识别,则不允许用户保存分配,如下例所示:
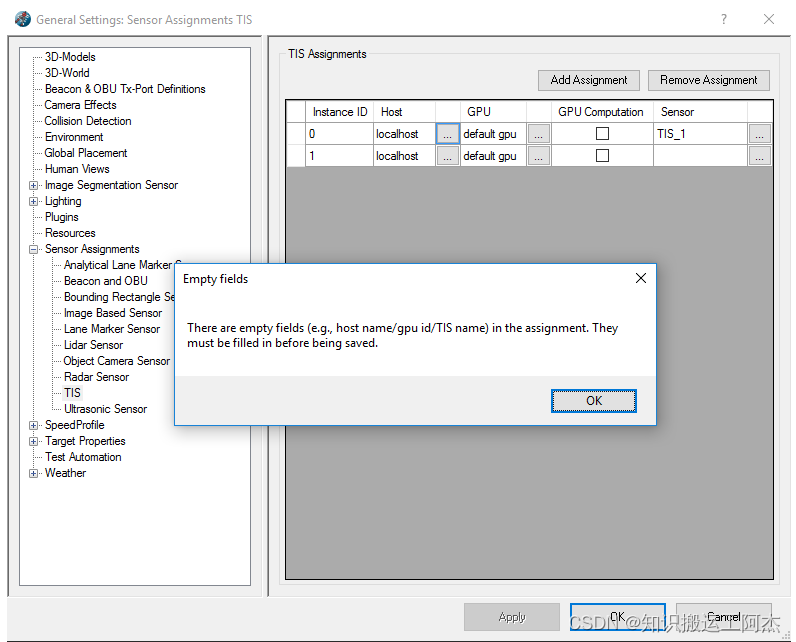
空分配字段
除了无效的主机名/GPU id/传感器名外,空字段的分配也会导致无效的分配,因此无法保存,如以下示例所示:
分配不完整
最后,不完整的传感器分配(在这种情况下,某些传感器未分配)也无法保存(请参阅下一节中的第一个示例)。
自动创建/完成作业
GUI将检测到未完成的分配,并通过正确修改/编辑分配表来完成分配,如以下示例所示:
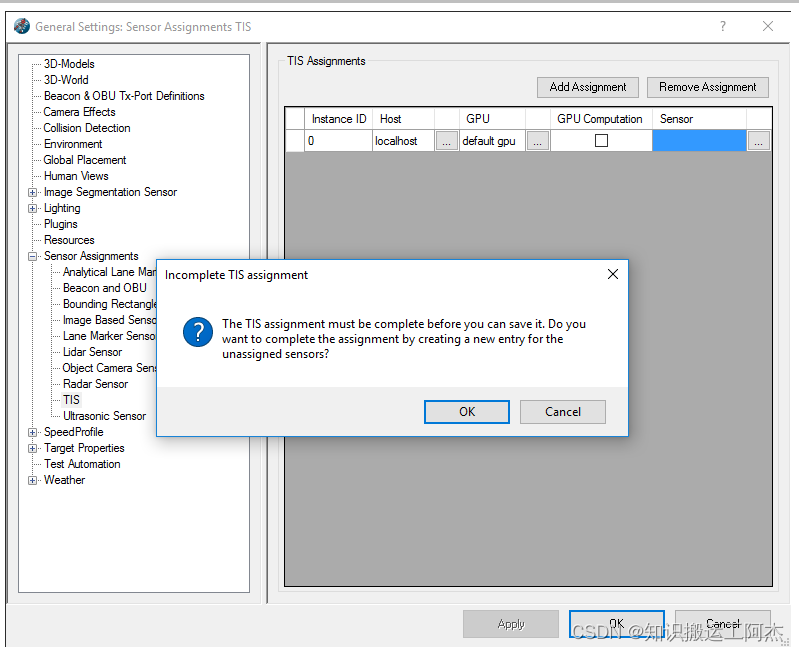
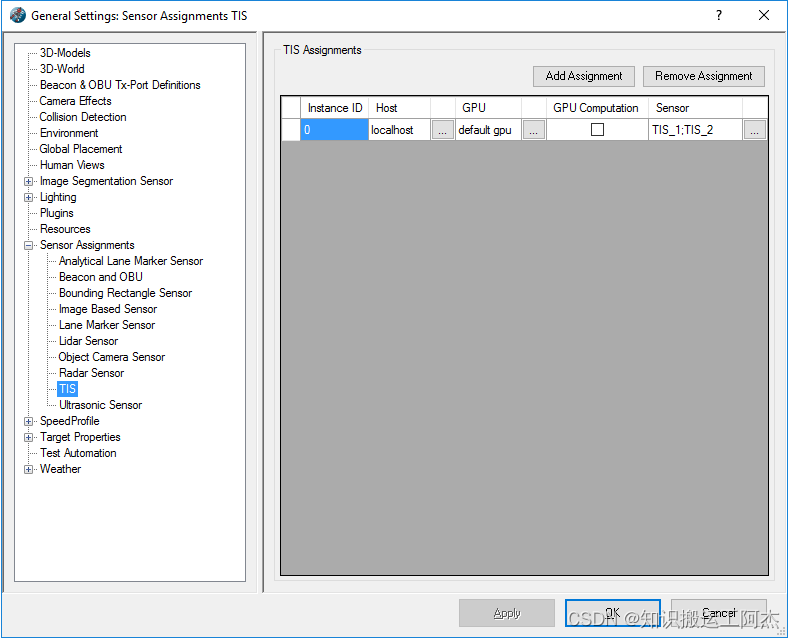
将创建未分配传感器(例如TIS_2)的默认分配。在这种情况下,由于已经有一个具有默认赋值的赋值条目(第一行),TIS_2将添加到第一行的“传感器”字段中。
创建新实验或打开没有传感器分配设置的现有实验时,将生成默认分配,将所有传感器分配给本地主机上的默认GPU,如以下示例所示(注意:当访问传感器分配GUI时,没有为实验保存传感器分配):
除了在分配GUI中自动完成外,在解析/构建实验时,PreScan还将自动:
·检测新添加的传感器,通过创建/修改适当的表条目完成分配,并将其分配给本地主机的默认GPU;
·从分配表中删除不存在的传感器。
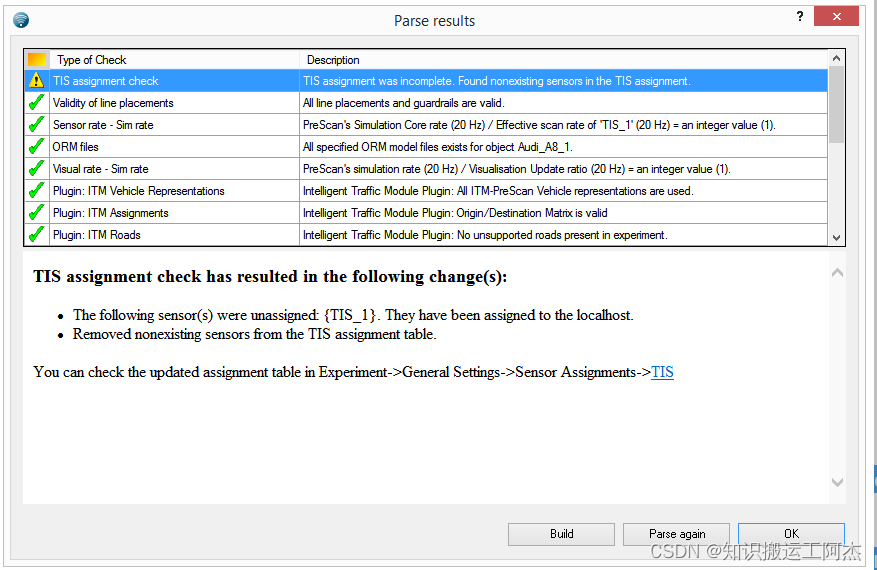
下图显示了从实验中删除传感器TIS_2并添加传感器TIS_1的示例,解析检查器将自动修改/完成分配表。如果用户直接构建实验而不单击“解析实验”按钮,那么自动分配完成将在后台完成。