目录
一、控制BLDC速度转动
1、方法一:构建一个控制器控制电压的大小
2、方法二:使用PWM
3、下面就是两种pwm的构建方法:
一、控制BLDC速度转动
1、方法一:构建一个控制器控制电压的大小
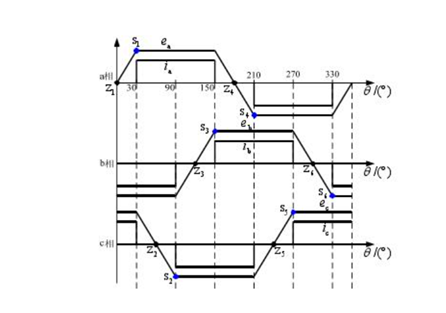
首先,先建立一个霍尔传感器获取电机的角位置和速度,将转子内的区域划分为6个扇区,霍尔传感器不会提供转子的具体位置信息,但是可以检测转子何时从一个扇区转到另一个扇区,而且实际上只要知道位置信息,就可以对电机进行换向,这个时候又不知道换A/B/C的哪两个,因此需要采用换向逻辑,通过此逻辑确定三相逆变器开关,如下图2


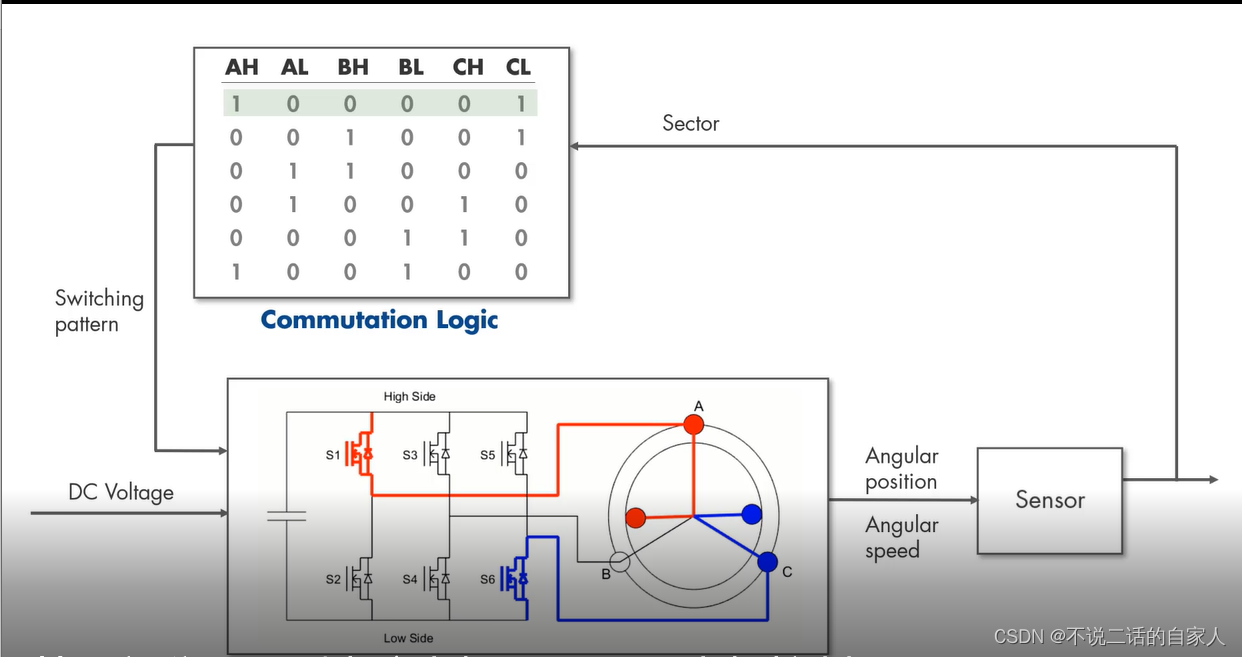
换向逻辑与三相逆变器的相互作用
首先是换向逻辑中的A、B、C分别代表A相,B相,C相,而H、L则代表三相逆变器里高压侧和低压侧,如上面第一个逻辑100001,则代表A相高压侧和C相低压侧开关打开,如下图:通过换向逻辑来使能三相逆变器,从而达到使能电机旋转的目的
控制速度
上述已经完成了对电机旋转的基本控制,但仍旧达不到我们想要的按既定目的速度运行,改变速度就要改变电压大小,因此我们需要控制电压的大小,我们可以采用适当的闭环控制来进行,通过期望速度与实际速度之间的差异输出再加上pid控制器调整,控制电压的大小使得电机运转速度达到期望速度,这一部分基本上也都是属于算法控制的,包括霍尔传感器的6个逻辑控制。

扭矩响应的波动是BLDC梯形控制的缺点之一,产生原因进行分析:
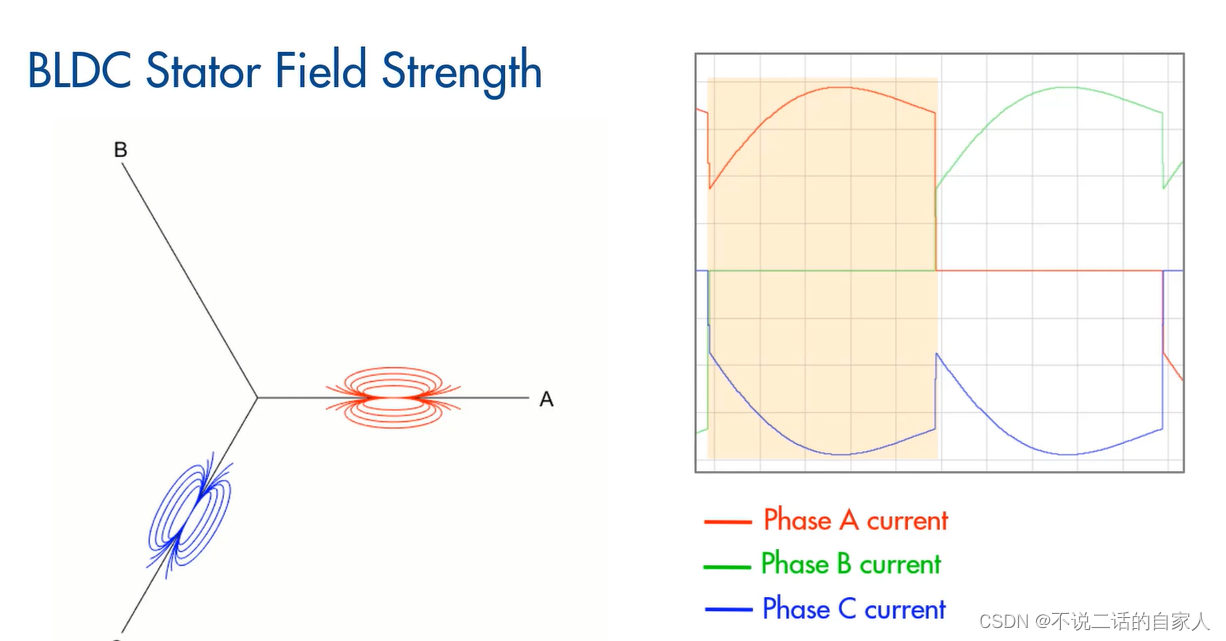
可以看三相电流,随着A/C相磁场、电流增大,达到峰值左右时,突然断开,从而将电流转移到B相上,则如下图:

由于A相突然断相,则图中红色线则变为0,绿色线开始跳变,蓝色线也开始跳变,可以看到都是在峰值的一半左右,这是因为B/C两处的场强在50%时达到平衡,这样我们可以在实际应用中看到三相电压的尖峰,称为感应反激

整体模型如下:

2、方法二:使用PWM
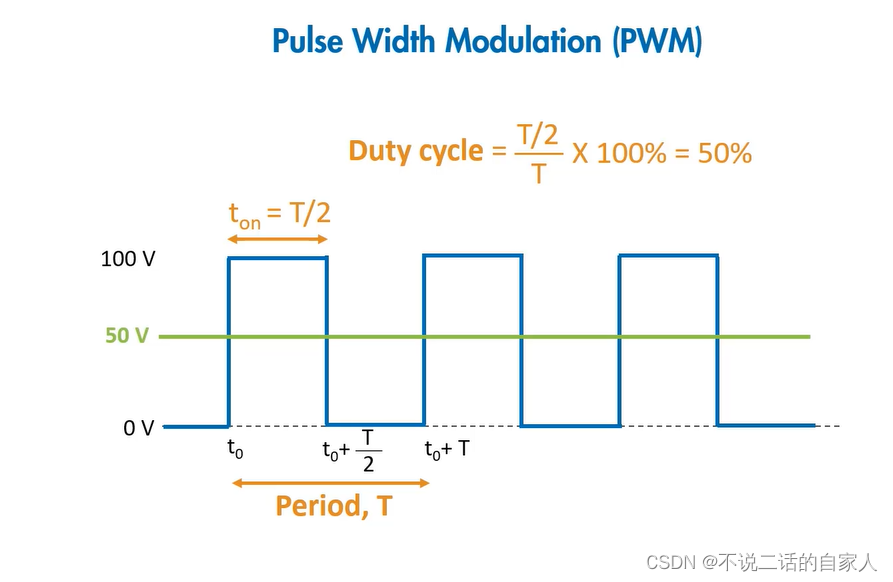
在实际应用中,我们一般采用的都是恒定的直流电压源,而非上面所讲的理想可调电压源,因此采用PWM控制就变得很有必要了,首先先认识一下PWM是什么:

PWM全称脉冲宽度调制pulse width modulation,如上图是以一种方波的信号形式,且以一种频率重复自身,一个周期即从一个上升沿到下一个上升沿为一个周期,占空比即一个周期内第一个上升沿到第一个下降沿的区域占据一个周期的大小,上图为50%,占空比也可以说是在给定一个周期内pwm信号打开的时间百分比
如下图:若给定的电压范围在0~100V区间,占空比设定为50%,那么获得的平均电压就为50V
需要注意的是,在选取pwm频率时,不能采取的太低,不然获得的电压就不是平均电压,而是方波的电压,这就导致转速无法跟上设定速度,电机就会出现加速、减速,相反,我们将频率设定在一个合理的地方,那么电压就会被平均化,从而提高调速性能,具体两种状态分析如下图1、2

图1 频率过低时

图2 频率合理时
中间是的黄色纹波是由于pwm打开会产生的纹波效应,通常BLDC采用的频率一般为几千赫兹,且应远大于电机时间常数的倒数

3、下面就是两种pwm的构建方法:
- 模型如下:
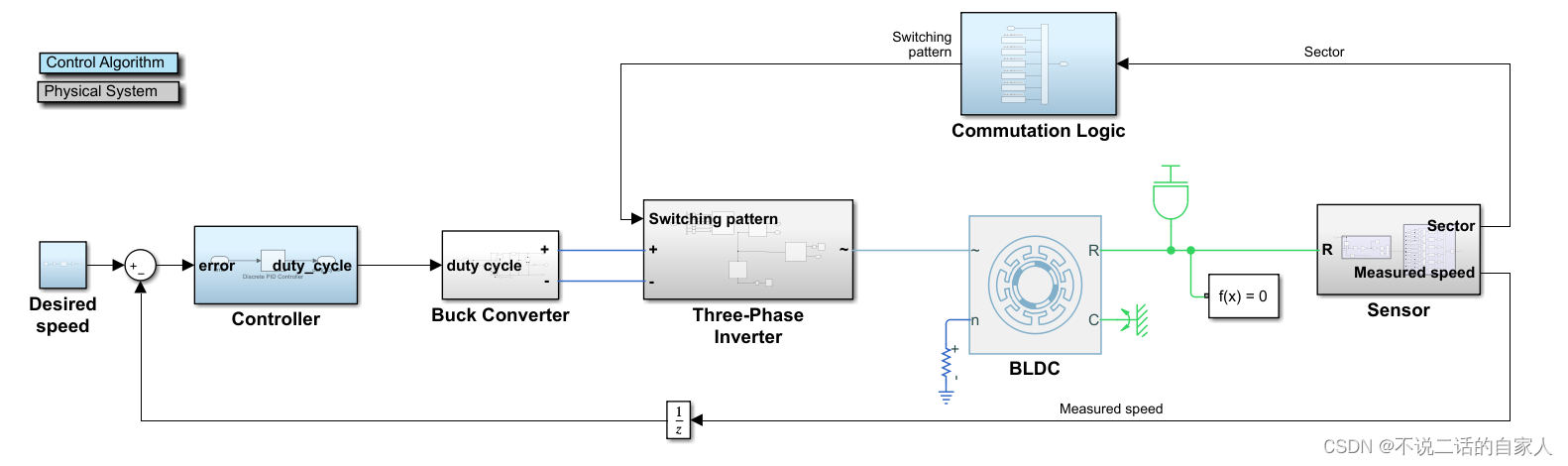
区别于第一种理想电压调节的方法的模型图,该模型增加了一个buck converter (降压转换器)实现pwm控制,这个模块就是用于电压调节控制,以改变电机速度
这是一种pwm和降压变换器相互配合为三相逆变器输入所需直流电压
2、这是第二种方式,直接调制相电压,模型如下

在这里,pwm直接位于换向逻辑子系统中,pwm发生器根据转子所在的扇区通过脉冲方式开启或关闭,以确保正确的相电压输出

过程如何我们可以直接运行模型观测各数据点数据图形可以看出。