❤️ 专栏简介:本专栏记录了从零学习单片机的过程,其中包括51单片机和STM32单片机两部分;建议先学习51单片机,其是STM32等高级单片机的基础;这样再学习STM32时才能融会贯通。
☀️ 专栏适用人群 :适用于想要从零基础开始学习入门单片机,且有一定C语言基础的的童鞋。
🌙专栏目标:实现从零基础入门51单片机和STM32单片机,力求在玩好单片机的同时,能够了解一些计算机的基本概念,了解电路及其元器件的基本理论等。⭐️ 专栏主要内容: 主要学习51单片机的功能、各个模块、单片机的外设、驱动等,最终玩好单片机和单片机的外设,全程手敲代码,实现我们所要实现的功能。
🌴 专栏说明 :如果文章知识点有错误的地方,欢迎大家随时在文章下面评论,我会第一时间改正。让我们一起学习,一起进步。
💑专栏主页:http://t.csdn.cn/HCD8v
本学习过程参考:https://space.bilibili.com/383400717
单片机安装软件、各种资料以及源码的路径:
https://pan.baidu.com/s/1vDTN2o8ffvczzNQGfyjHng
提取码:gdzf
本节主要介绍学习红外遥控(外部中断)的相关知识,包括红外遥控(外部中断)介绍、本节目标等;并利用两个小实验来写程序进行练习,分别是红外遥控以及 红外遥控电机调速,最后附上相关代码。
文章目录
- 一、红外遥控和本节目标
- 1.1 红外遥控基础知识
- 1.2 51单片机的外部中断
- 1.3 本节目标
- 二、红外遥控
- 二、红外遥控电机调速
一、红外遥控和本节目标
1.1 红外遥控基础知识
红外遥控简介

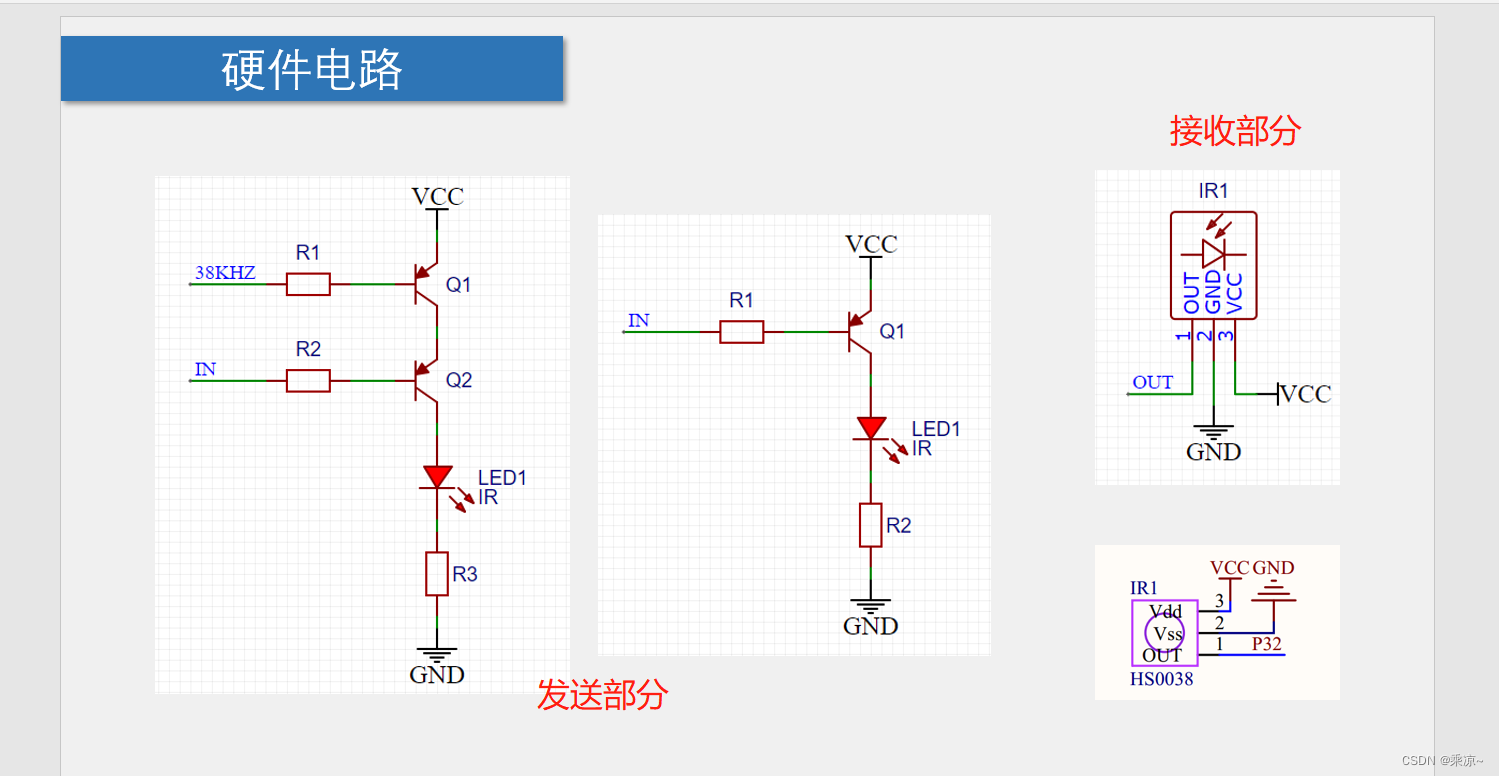
硬件电路
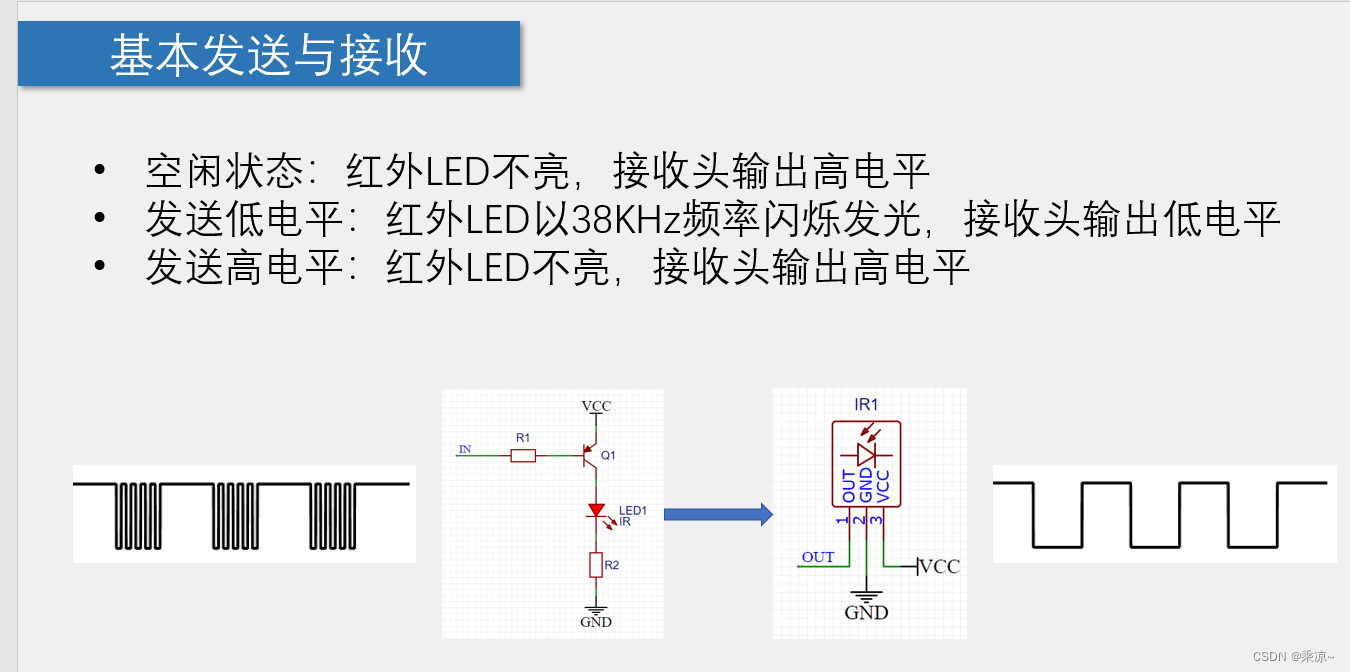
基本接收与发送
NEC编码
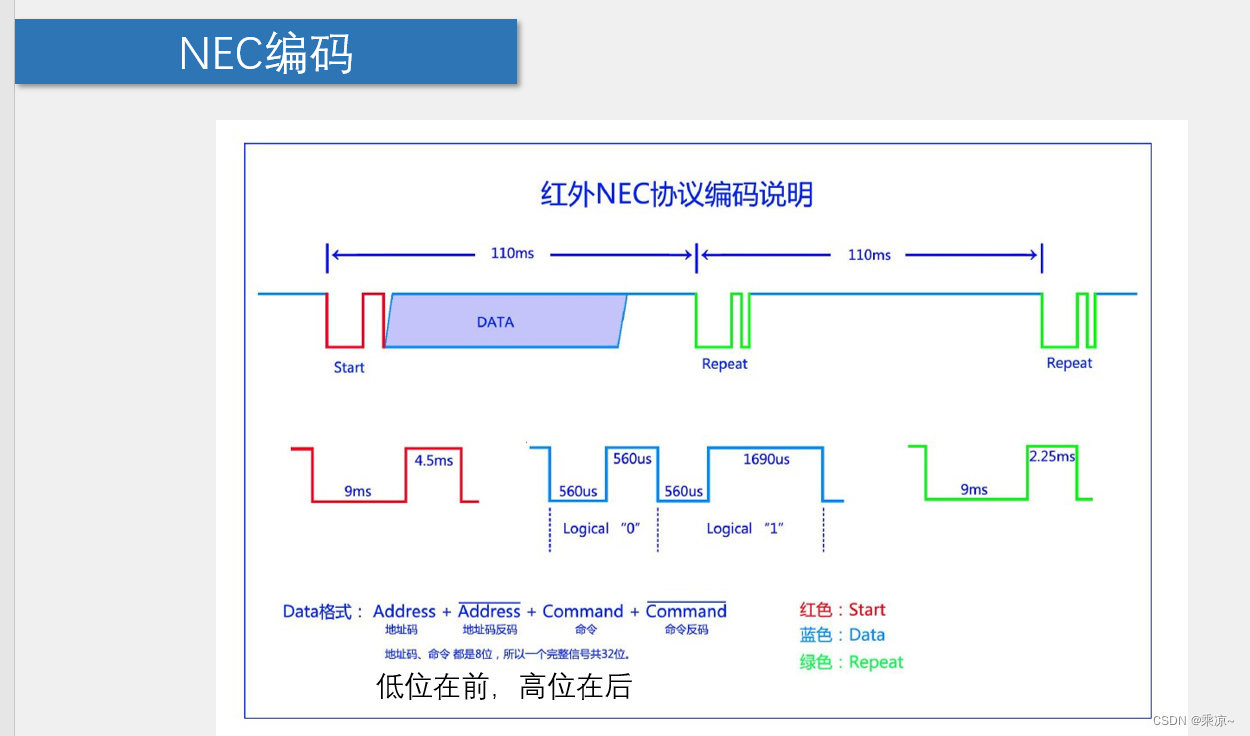
遥控器并不会直接发送0还是1;而是根据时间的长短来进行判断是0还是1;如上图中,560us+560us这个周期表示0;560us+1690us这个周期表示1;
下图是示波器输出的遥控器各个键码的按下时的波形,可以看出来跟上面我们分析的时序图(NEC编码)是一致的;
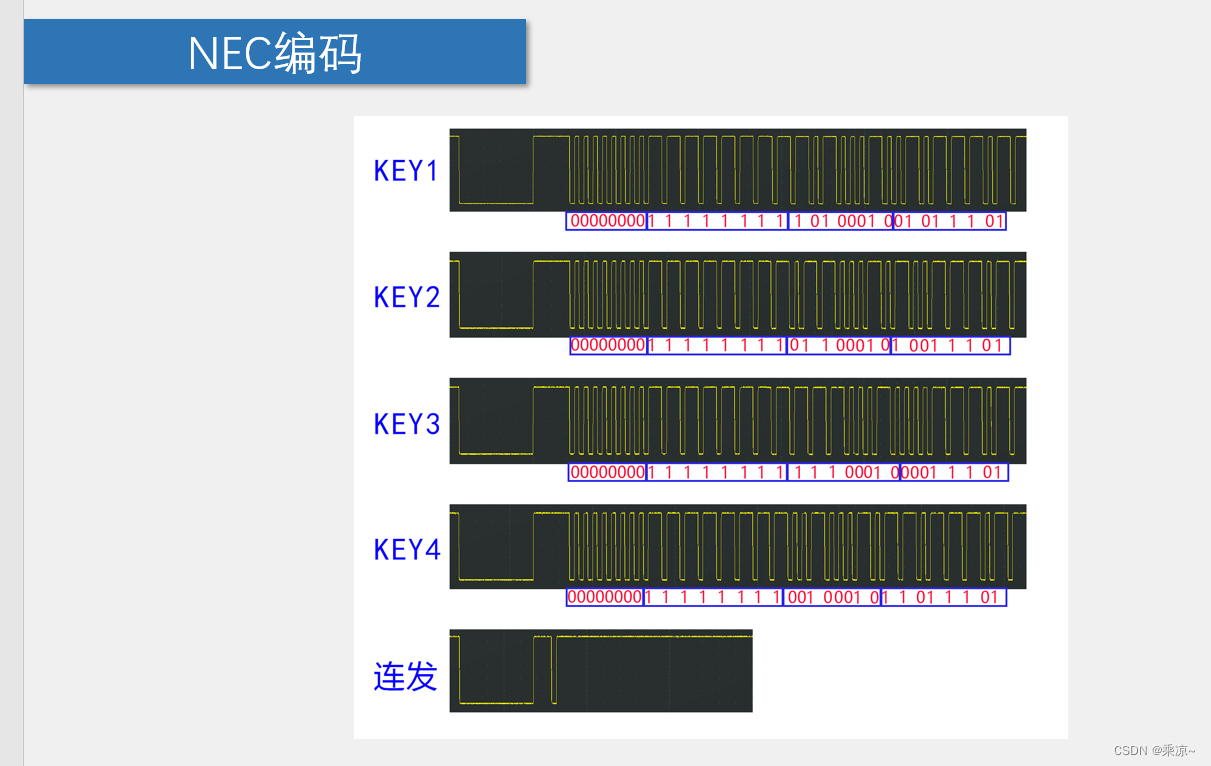
遥控器键码

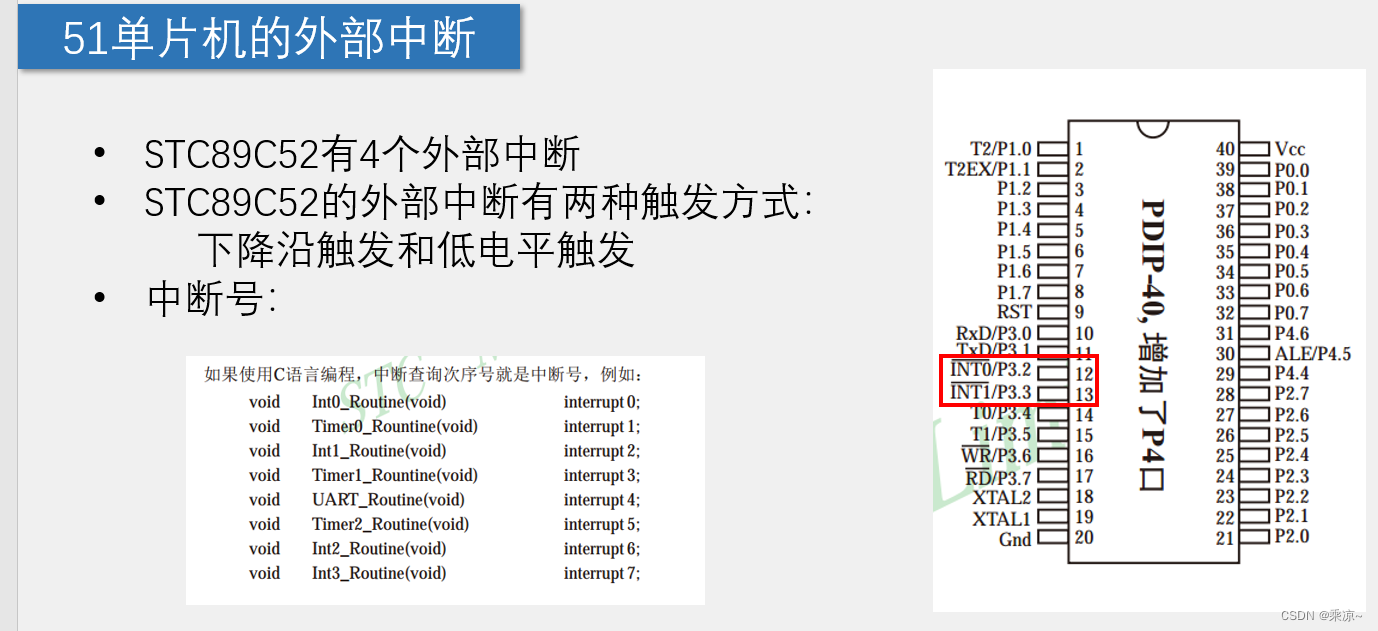
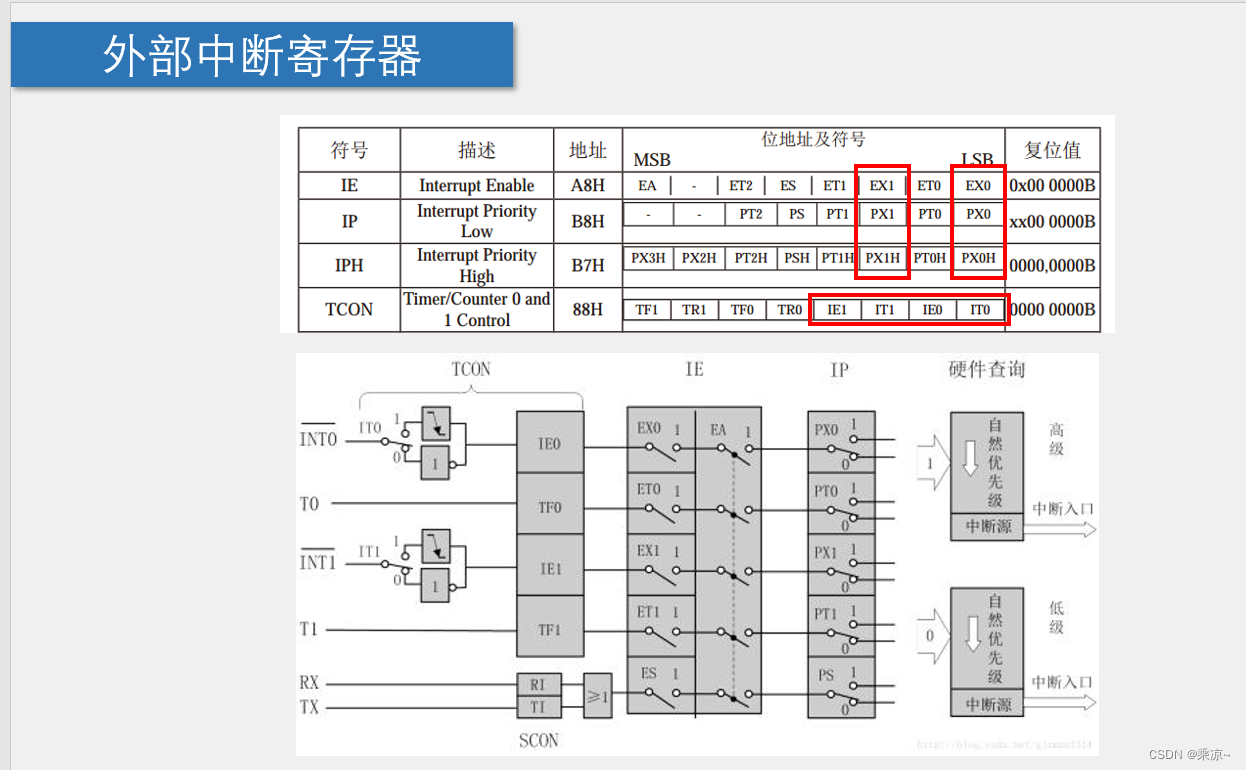
1.2 51单片机的外部中断
1.3 本节目标
目标1:红外遥控
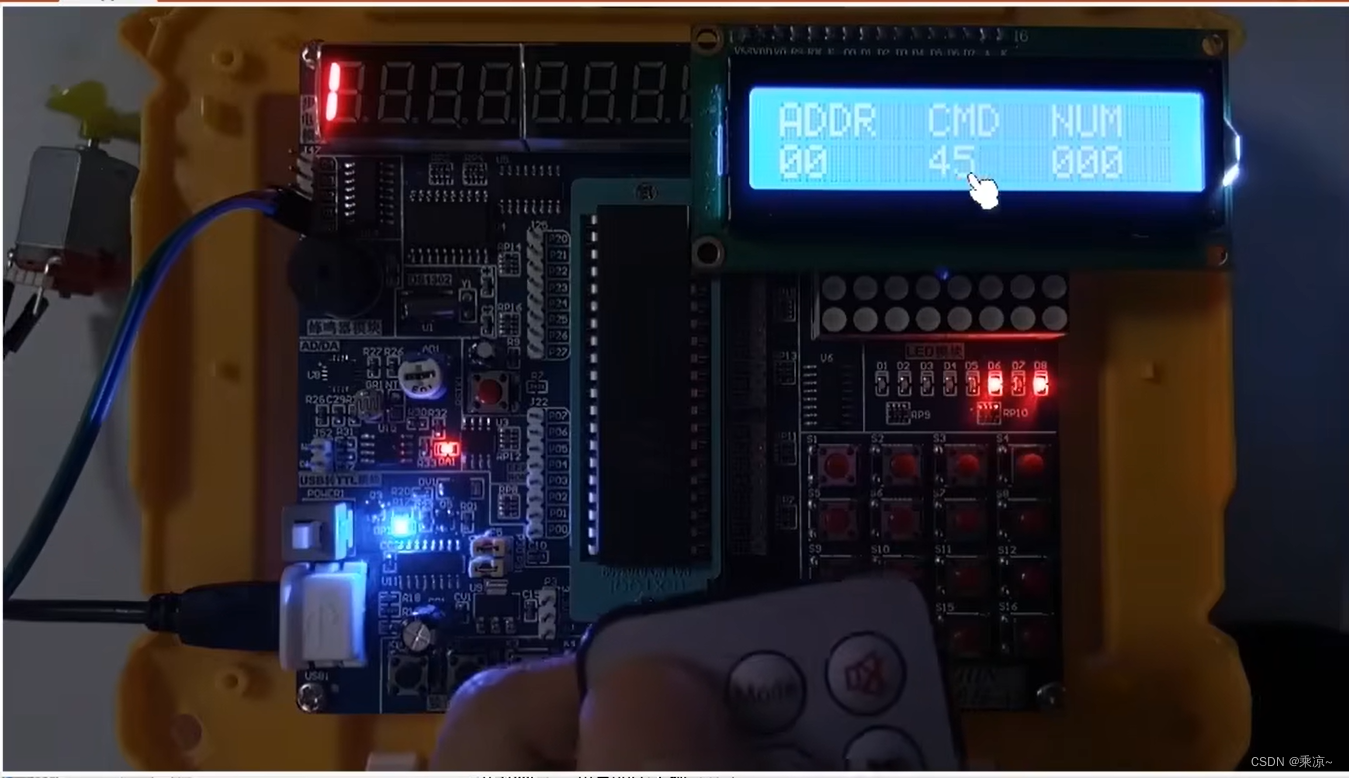
LCD1602上显示遥控器地址码、遥控器控制码,以及自定义数字;
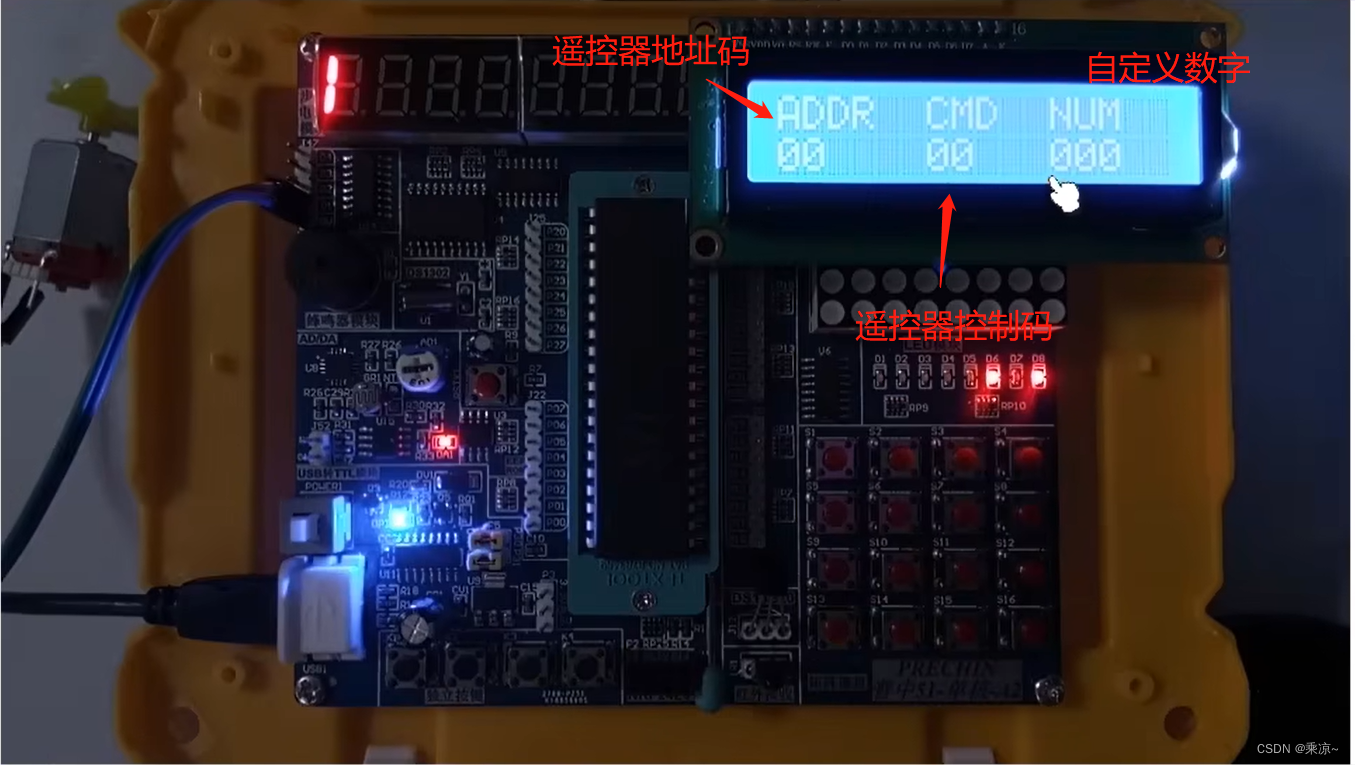
例如,当按下遥控器的开关键,如下图:

则LCD1602上的控制码会显示45,因为该键的控制码就是45:
另外,使用遥控器上的VOL+和VOL-控制我们自定义数字的加和减:

当按下VOL+时,自定义数字往上增加,按下VOL-时,自定义数字减少,例如当按下VOL+时:

目标2:红外遥控电机调速
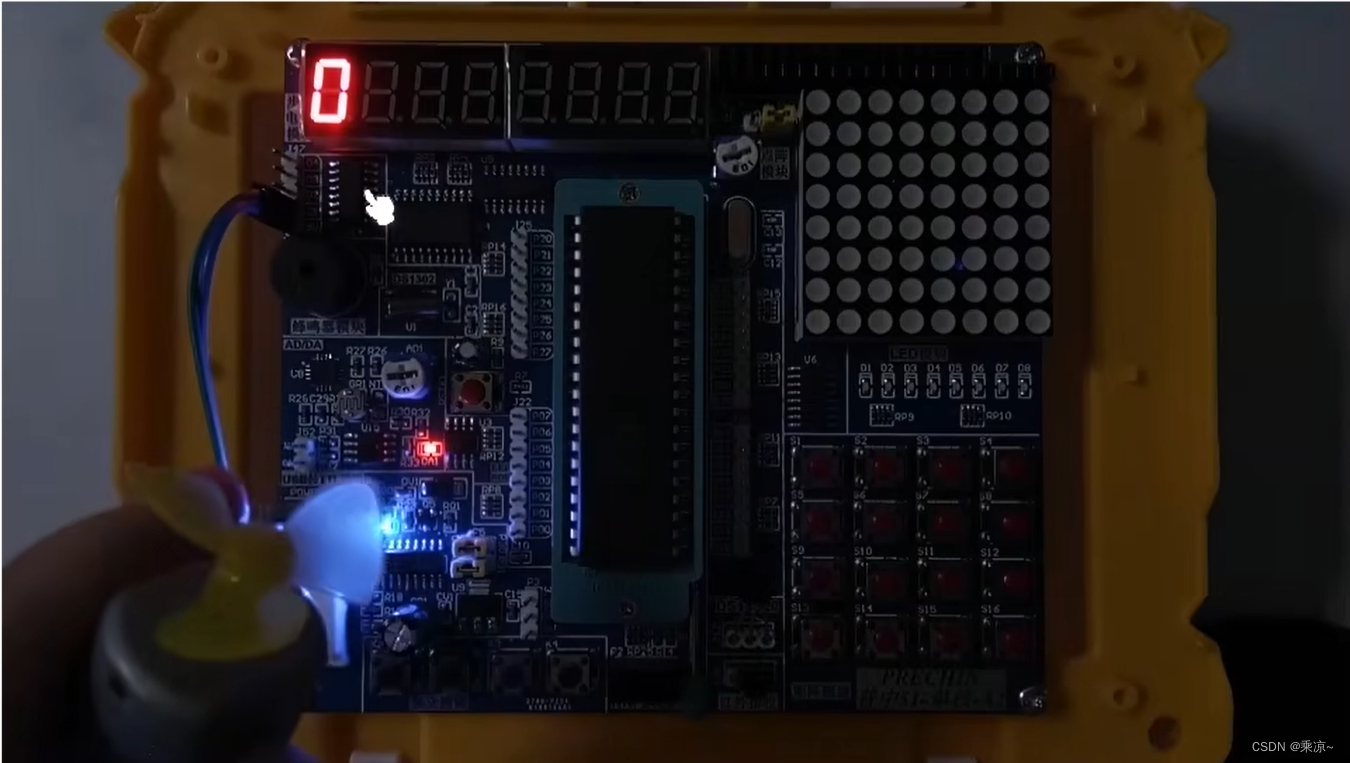
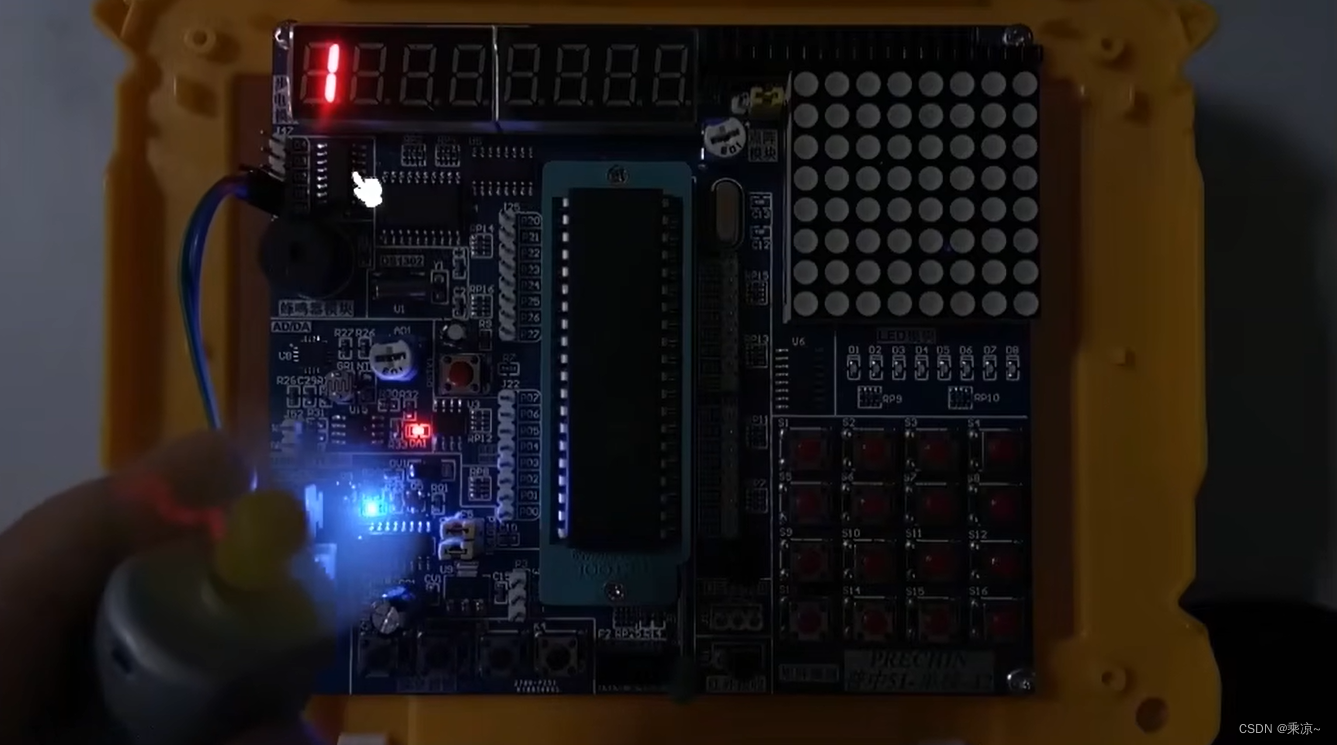
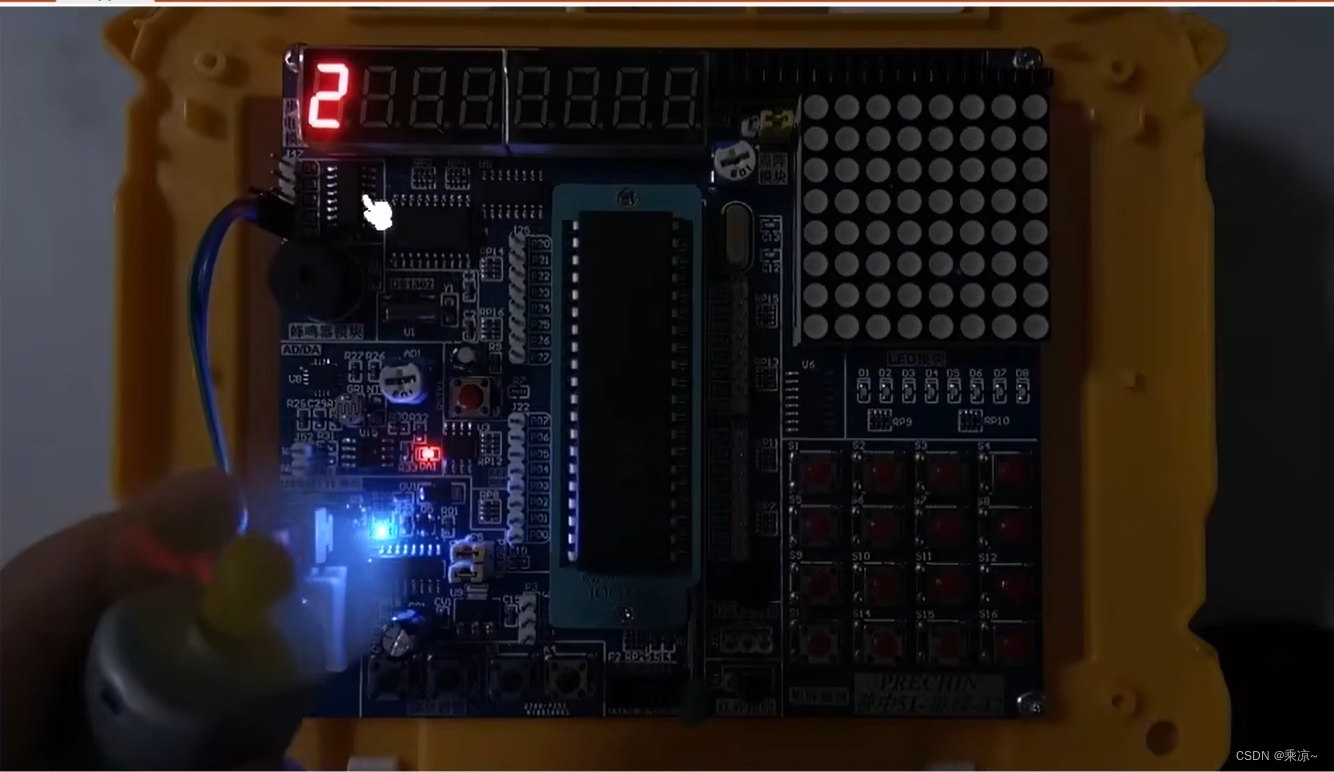
用遥控器的0 、 1、 2、 3等按键对电机进行调速;
按0,电机停:
按1和2和3,则分别按照1速度、2速度、3速度转:
二、红外遥控
代码路径:51单片机入门教程资料\课件及程序源码\程序源码\KeilProject\17-1 红外遥控(11.0592MHz晶振)
具体代码:
#include <REGX52.H>
#include "Delay.h"
#include "LCD1602.h"
#include "IR.h"unsigned char Num;
unsigned char Address;
unsigned char Command;void main()
{LCD_Init();LCD_ShowString(1,1,"ADDR CMD NUM");LCD_ShowString(2,1,"00 00 000");IR_Init();while(1){if(IR_GetDataFlag() || IR_GetRepeatFlag()) //如果收到数据帧或者收到连发帧{Address=IR_GetAddress(); //获取遥控器地址码Command=IR_GetCommand(); //获取遥控器命令码LCD_ShowHexNum(2,1,Address,2); //显示遥控器地址码LCD_ShowHexNum(2,7,Command,2); //显示遥控器命令码if(Command==IR_VOL_MINUS) //如果遥控器VOL-按键按下{Num--; //Num自减}if(Command==IR_VOL_ADD) //如果遥控器VOL+按键按下{Num++; //Num自增}LCD_ShowNum(2,12,Num,3); //显示Num}}
}
Int0.c
#include <REGX52.H>/*** @brief 外部中断0初始化* @param 无* @retval 无*/
void Int0_Init(void)
{IT0=1;IE0=0;EX0=1;EA=1;PX0=1;
}/*外部中断0中断函数模板
void Int0_Routine(void) interrupt 0
{}
*/
IR.c:
#include <REGX52.H>
#include "Timer0.h"
#include "Int0.h"unsigned int IR_Time;
unsigned char IR_State;unsigned char IR_Data[4];
unsigned char IR_pData;unsigned char IR_DataFlag;
unsigned char IR_RepeatFlag;
unsigned char IR_Address;
unsigned char IR_Command;/*** @brief 红外遥控初始化* @param 无* @retval 无*/
void IR_Init(void)
{Timer0_Init();Int0_Init();
}/*** @brief 红外遥控获取收到数据帧标志位* @param 无* @retval 是否收到数据帧,1为收到,0为未收到*/
unsigned char IR_GetDataFlag(void)
{if(IR_DataFlag){IR_DataFlag=0;return 1;}return 0;
}/*** @brief 红外遥控获取收到连发帧标志位* @param 无* @retval 是否收到连发帧,1为收到,0为未收到*/
unsigned char IR_GetRepeatFlag(void)
{if(IR_RepeatFlag){IR_RepeatFlag=0;return 1;}return 0;
}/*** @brief 红外遥控获取收到的地址数据* @param 无* @retval 收到的地址数据*/
unsigned char IR_GetAddress(void)
{return IR_Address;
}/*** @brief 红外遥控获取收到的命令数据* @param 无* @retval 收到的命令数据*/
unsigned char IR_GetCommand(void)
{return IR_Command;
}//外部中断0中断函数,下降沿触发执行
void Int0_Routine(void) interrupt 0
{if(IR_State==0) //状态0,空闲状态{Timer0_SetCounter(0); //定时计数器清0Timer0_Run(1); //定时器启动IR_State=1; //置状态为1}else if(IR_State==1) //状态1,等待Start信号或Repeat信号{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为13.5ms,则接收到了Start信号(判定值在12MHz晶振下为13500,在11.0592MHz晶振下为12442)if(IR_Time>13500-500 && IR_Time<13500+500){IR_State=2; //置状态为2}//如果计时为11.25ms,则接收到了Repeat信号(判定值在12MHz晶振下为11250,在11.0592MHz晶振下为10368)else if(IR_Time>11250-500 && IR_Time<11250+500){IR_RepeatFlag=1; //置收到连发帧标志位为1Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}else //接收出错{IR_State=1; //置状态为1}}else if(IR_State==2) //状态2,接收数据{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为1120us,则接收到了数据0(判定值在12MHz晶振下为1120,在11.0592MHz晶振下为1032)if(IR_Time>1120-500 && IR_Time<1120+500){IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8)); //数据对应位清0IR_pData++; //数据位置指针自增}//如果计时为2250us,则接收到了数据1(判定值在12MHz晶振下为2250,在11.0592MHz晶振下为2074)else if(IR_Time>2250-500 && IR_Time<2250+500){IR_Data[IR_pData/8]|=(0x01<<(IR_pData%8)); //数据对应位置1IR_pData++; //数据位置指针自增}else //接收出错{IR_pData=0; //数据位置指针清0IR_State=1; //置状态为1}if(IR_pData>=32) //如果接收到了32位数据{IR_pData=0; //数据位置指针清0if((IR_Data[0]==~IR_Data[1]) && (IR_Data[2]==~IR_Data[3])) //数据验证{IR_Address=IR_Data[0]; //转存数据IR_Command=IR_Data[2];IR_DataFlag=1; //置收到连发帧标志位为1}Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}}
}
二、红外遥控电机调速
代码路径:51单片机入门教程资料\课件及程序源码\程序源码\KeilProject\17-2 红外遥控电机调速
具体代码:
#include <REGX52.H>
#include "Delay.h"
#include "Key.h"
#include "Nixie.h"
#include "Motor.h"
#include "IR.h"unsigned char Command,Speed;void main()
{Motor_Init();IR_Init();while(1){if(IR_GetDataFlag()) //如果收到数据帧{Command=IR_GetCommand(); //获取遥控器命令码if(Command==IR_0){Speed=0;} //根据遥控器命令码设置速度if(Command==IR_1){Speed=1;}if(Command==IR_2){Speed=2;}if(Command==IR_3){Speed=3;}if(Speed==0){Motor_SetSpeed(0);} //速度输出if(Speed==1){Motor_SetSpeed(50);}if(Speed==2){Motor_SetSpeed(75);}if(Speed==3){Motor_SetSpeed(100);}}Nixie(1,Speed); //数码管显示速度}
}
Motor.c:
#include <REGX52.H>
#include "Timer1.h"//引脚定义
sbit Motor=P1^0;unsigned char Counter,Compare;/*** @brief 电机初始化* @param 无* @retval 无*/
void Motor_Init(void)
{Timer1_Init();
}/*** @brief 电机设置速度* @param Speed 要设置的速度,范围0~100* @retval 无*/
void Motor_SetSpeed(unsigned char Speed)
{Compare=Speed;
}//定时器1中断函数
void Timer1_Routine() interrupt 3
{TL1 = 0x9C; //设置定时初值TH1 = 0xFF; //设置定时初值Counter++;Counter%=100; //计数值变化范围限制在0~99if(Counter<Compare) //计数值小于比较值{Motor=1; //输出1}else //计数值大于比较值{Motor=0; //输出0}
}