简介
本插件基于免费opendrive开源插件、Threejs和Webgl三维技术、vue前端框架,blender开源建模工具等进行二次开发。该插件由本人独立开发以及负责,目前处于demo阶段,功能还需待完善,由于开发仓促代码还需优化。
因此,使用和阅读者需要具备 :
- opendrive源码基础,xodr文件格式理解
- threejs三维渲染引擎
- webgl三维协议以及相关着色器知识
- 会使用blender,具备一定的建模基础
- javaScript技术
- vue框架
- echarts数据可视化图表库
- 熟悉各种坐标系,如 世界坐标系,st坐标系,uv坐标系,xyz惯性坐标系,物体坐标系,
- 数学知识基础(极坐标,微分,向量)等
- 离屏渲染思想、webgl着色器(vertexShader、fragmentShader)
- glsl语法
核心功能
- xodr文件解析
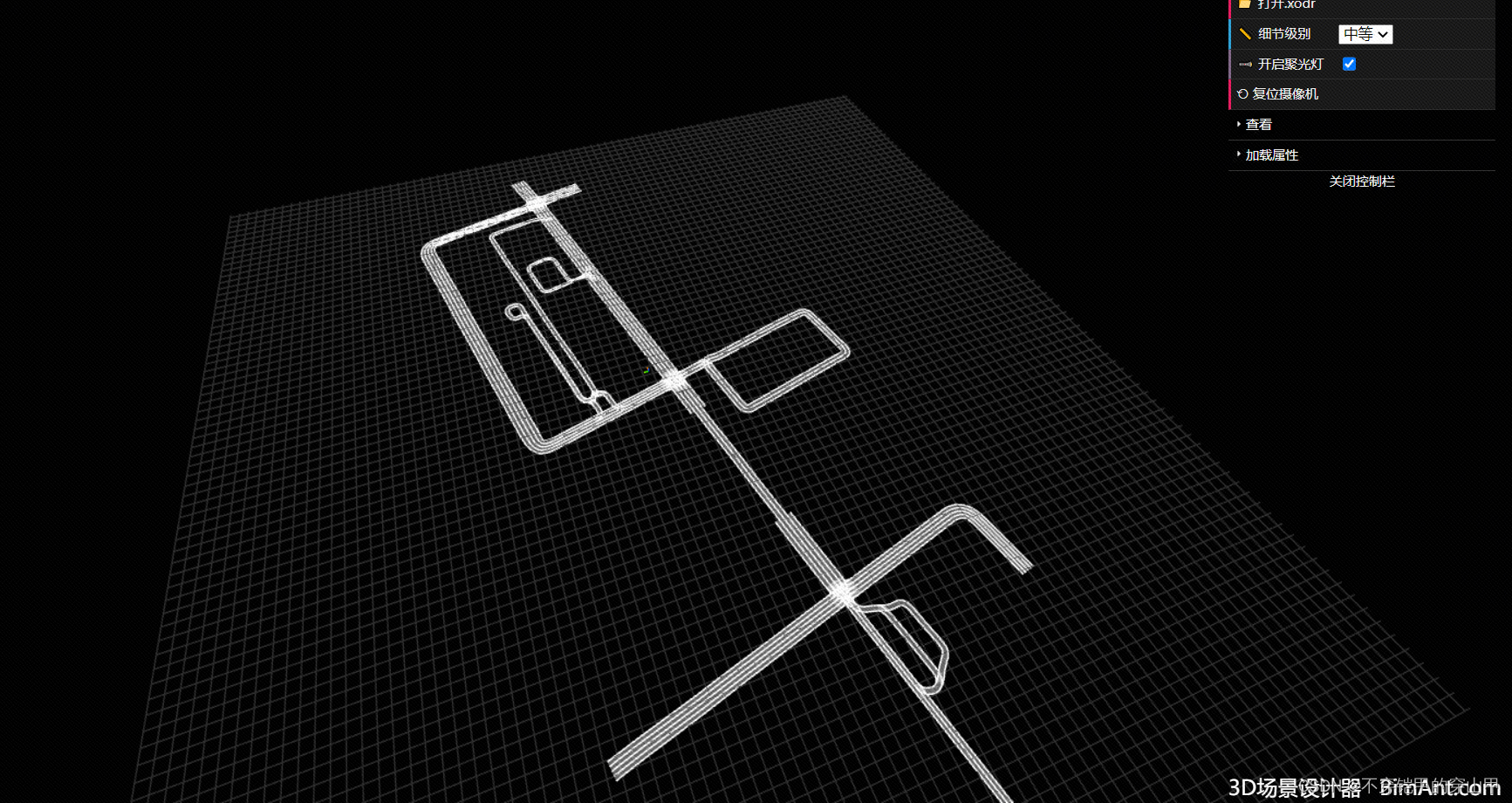
- 地图渲染
- 车辆三视图(算法优化)
- 道路追踪
- 全局路径规划展示
- 自定义打点
- 车辆运行
- 车轮旋转
- 鼠标定位(三维)
- GPU颜色拾取
- 支持远程或者本地数据文件加载
- 其他
xodr文件解析
该功能由opendrive插件实现,具体的文件格式可查阅opendrive官方
或者推荐网址
自动驾驶场景仿真标准(一)- OpenDRIVE - 知乎
《OpenDRIVE1.6规格文档》1_opendrive官方文档-CSDN博客
《OpenDRIVE1.6规格文档》3_opendrive 1.6_YMWM_的博客-CSDN博客
道路追踪
利用离屏渲染技术以及定位功能实现
gpu拾取颜色获取车道ID
//跟踪屏幕中间位置(近似跟踪车的位置)camera.setViewOffset(renderer.domElement.width, //画布的宽度renderer.domElement.height, //画布的高度renderer.domElement.width/2 | 0, //画布坐标系中,相机的x坐标位置renderer.domElement.height/2 | 0, //画布坐标系中,相机的y坐标位置1, //副相机的宽度1 //副相机的高度);//离屏渲染renderer.setRenderTarget(lane_picking_texture);renderer.render(lane_picking_scene, camera);renderer.setRenderTarget(roadmark_picking_texture);renderer.render(roadmark_picking_scene, camera);renderer.setRenderTarget(xyz_texture);renderer.render(xyz_scene, camera);renderer.setRenderTarget(st_texture);renderer.render(st_scene, camera);const lane_id_pixel_buffer = new Float32Array(4);//拾取颜色//console.log(mouse.x, window.innerHeight - mouse.y)renderer.readRenderTargetPixels(lane_picking_texture,0, //相机截图左上角为坐标原点,相对于截图左上角而言的渲染起始点x坐标0, //相机截图左上角为坐标原点,相对于截图左上角而言的渲染起始点y坐标1, //渲染宽度范围1, //渲染高度范围lane_id_pixel_buffer);
获取车道进行颜色渲染
if (isValid(lane_id_pixel_buffer)) {//根据颜色值解码成车道IDconst decoded_lane_id = decodeUInt32(lane_id_pixel_buffer);//自定义数据中获取所有车段中的所有车道数据const odr_lanes_mesh =road_network_mesh.userData.odr_road_network_mesh.lanes_mesh;//本次选中的区域车道ID是否和上次一样if (INTERSECTED_LANE_ID != decoded_lane_id) {//当前是否是初始化状态,如果不是则进行初始化,防止重复初始化if (INTERSECTED_LANE_ID != 0xffffffff) {//根据车道ID索引获取车道信息road_network_mesh.geometry.attributes.color.array.fill(COLORS.road);}//保存选中车道IDINTERSECTED_LANE_ID = decoded_lane_id;//根据车道ID获取车道信息const lane_vert_idx_interval =odr_lanes_mesh.get_idx_interval_lane(INTERSECTED_LANE_ID);//获取该车道长度const vert_count =lane_vert_idx_interval[1] - lane_vert_idx_interval[0];//修改离屏渲染场景中该车道的背景颜色applyVertexColors(road_network_mesh.geometry.attributes.color,new THREE.Color(COLORS.lane_highlight),lane_vert_idx_interval[0],vert_count);//手动更新颜色值road_network_mesh.geometry.attributes.color.needsUpdate = true;//显示左上角信息展示spotlight_info.style.display = "block";}//使用过后删除数据冗余,避免造成内存泄漏odr_lanes_mesh.delete();} else {//鼠标拾取无效色素//恢复初始化数据//当前是否已经是初始化状态如果不是则进行初始化if (INTERSECTED_LANE_ID != 0xffffffff) {const odr_lanes_mesh =road_network_mesh.userData.odr_road_network_mesh.lanes_mesh;const lane_vert_idx_interval =odr_lanes_mesh.get_idx_interval_lane(INTERSECTED_LANE_ID);road_network_mesh.geometry.attributes.color.array.fill(COLORS.road);road_network_mesh.geometry.attributes.color.needsUpdate = true;odr_lanes_mesh.delete();INTERSECTED_LANE_ID = 0xffffffff;spotlight_info.style.display = "none";}}地图渲染
利用opendrive开源插件对xodr文件的加载和解析,使用threejs框架对数据进行渲染
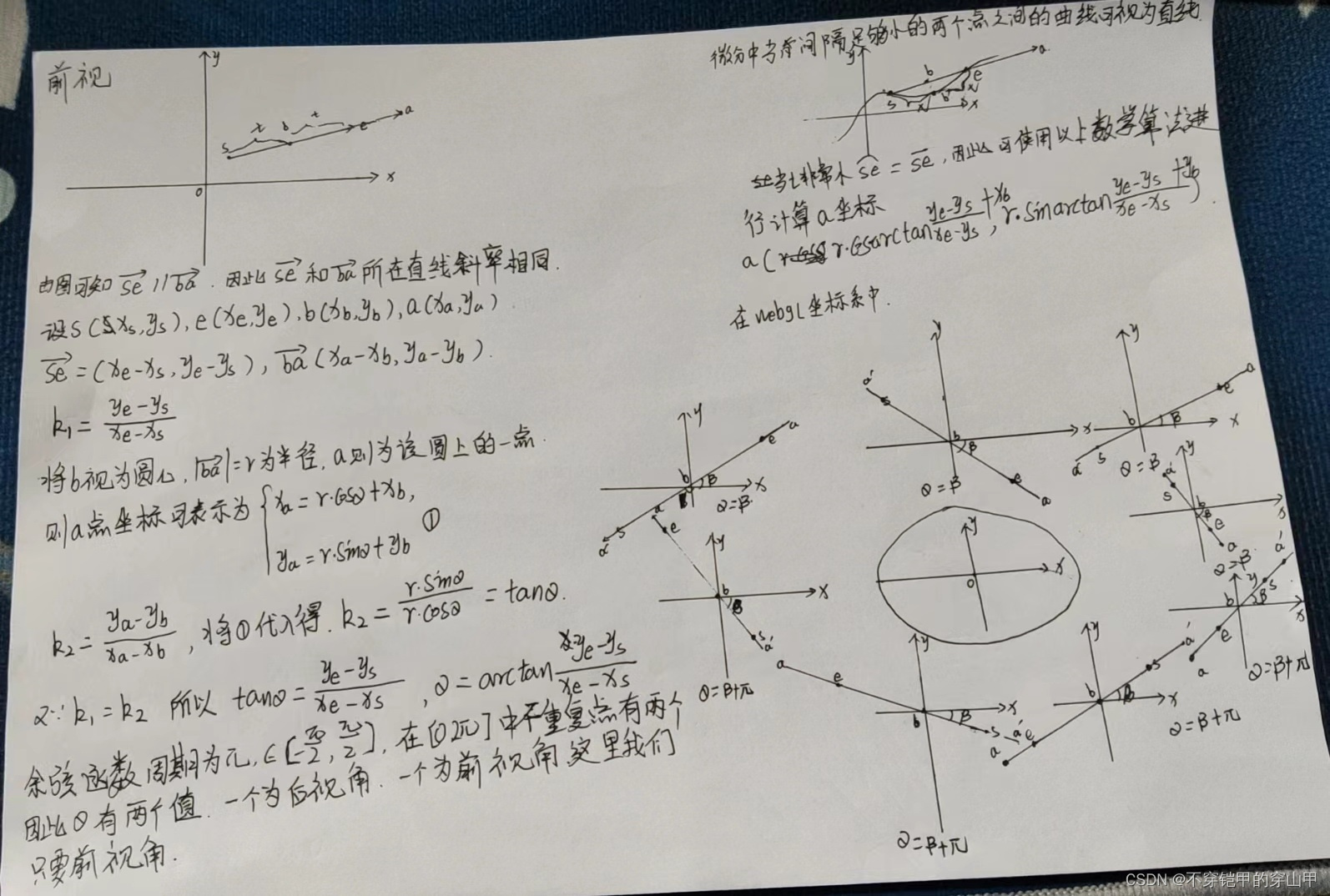
车辆三视图(算法优化)
优点:避免了点过于分散和间距过大造成的视图摇晃和颠簸问题
s:上一个点的位置
e:下一个点的位置
b:当前点的位置
a:摄像机的位置
正视图
效果图

侧视图
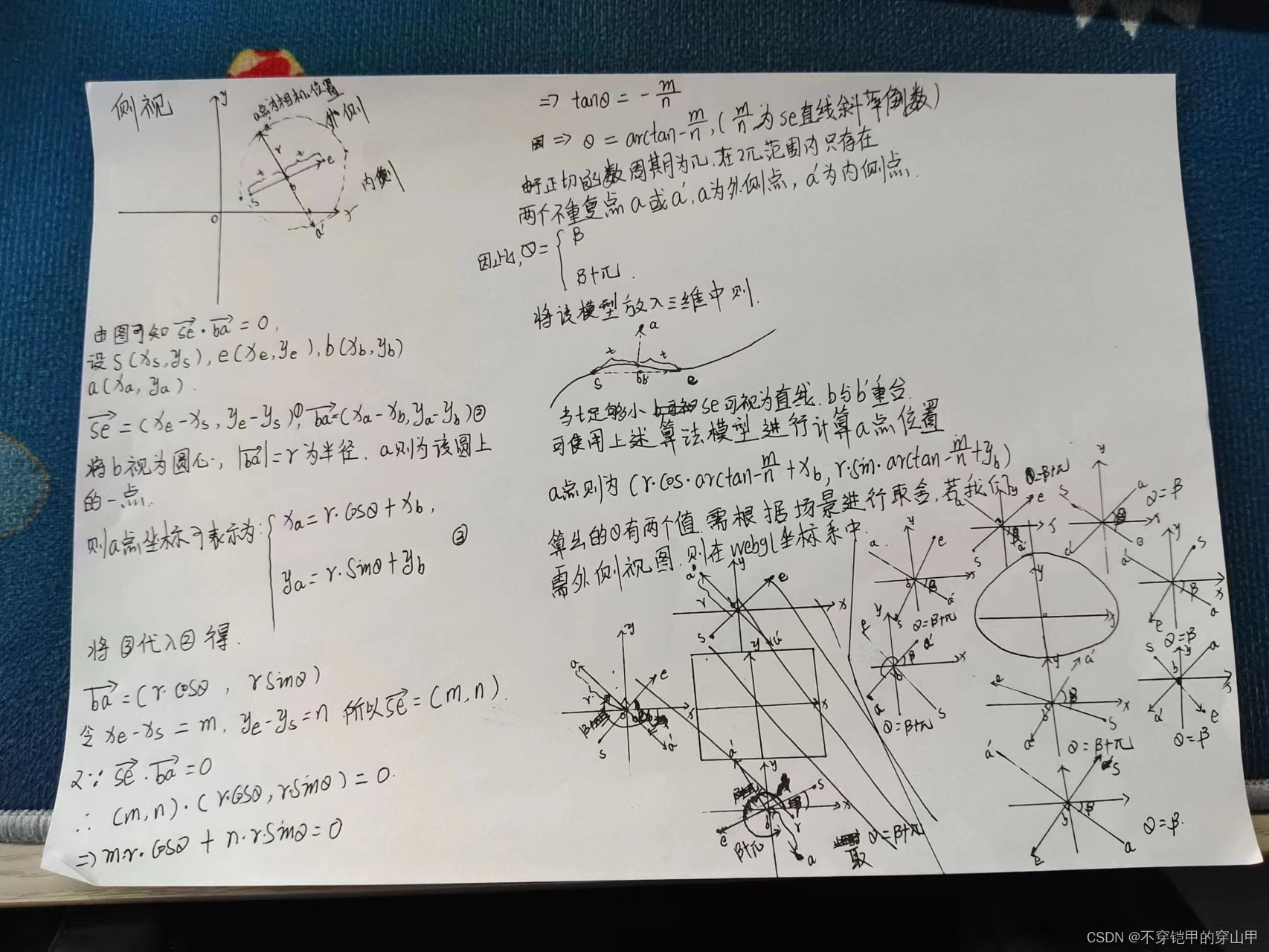
效果图:

俯视图
效果图
全局路径规划展示

车轮旋转
非车辆原地不动,车轮旋转,地图动的方式(录制软件掉帧问题,效果不太明显)
三维定位
左上角webgl坐标
自定义打点
点击开始打点,可在地图上进行自定义路径,点击启动,将展示路径和启动模型运行

中间红色线则为路线
其他
转弯

直行

变道
全局鸟瞰图