西门子plc s-7 1200驱动伺服电机方法
- 前言
- 完整设备连接
- 驱动实际接线图
- 程序编写
- 新建项目
- 添加工艺对象
- 配置工艺对象
- 程序编写
- 启动方法
- 选择工作模式
前言
其实,伺服电机还用另外两种工作模式,那就是速度控制和转矩控制,不过应用比较少而已。速度控制一般都是有变频器实现,用伺服电机做速度控制,一般是用于快速加减速或是速度精准控制的场合。
因为相对于变频器,伺服电机可以在几毫米内达到几千转,由于伺服都是闭环的,速度非常稳定。转矩控制主要是 控制伺服电机的输出转矩,同样是因为伺服电机的响应快。应用以上两种控制,可以把伺服驱动器当成变频器,一般都是用模拟量控制。
伺服电机最主要的应用还是定位控制,PLC对伺服电机的位置控制。位置控制有两个物理量需要控制,那就是速度和位置,确切的说,就是控制伺服电机以多快的速度到达什么地方,并准确的停下。
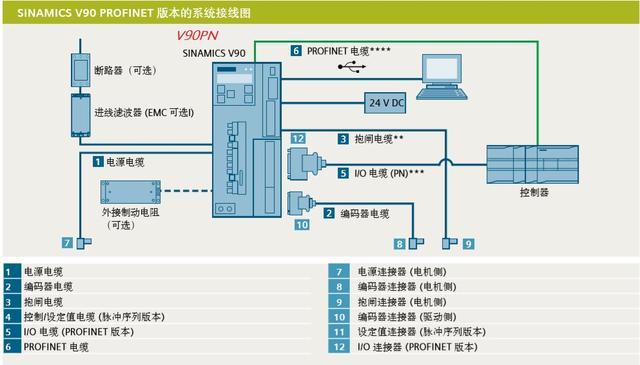
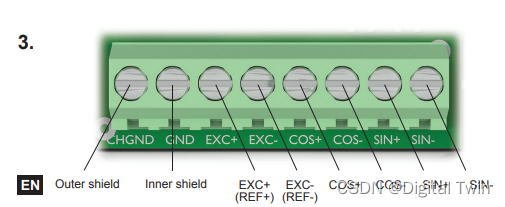
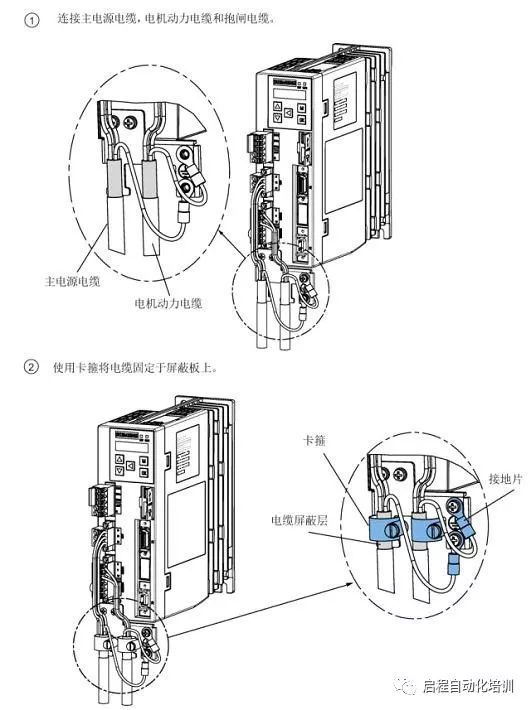
完整设备连接

驱动实际接线图

注意区分方向线和信号线的位置,在plc中的配置与实际接线要保持一致
程序编写
新建项目
首先新建plc项目,建项目方法请参考https://blog.csdn.net/qq_45172832/article/details/104638001
添加工艺对象
点击新增对象

配置工艺对象
添加方向输出端口和脉冲输出端口

其他只需要保持默认即可,如有更高要求可进行详细配置
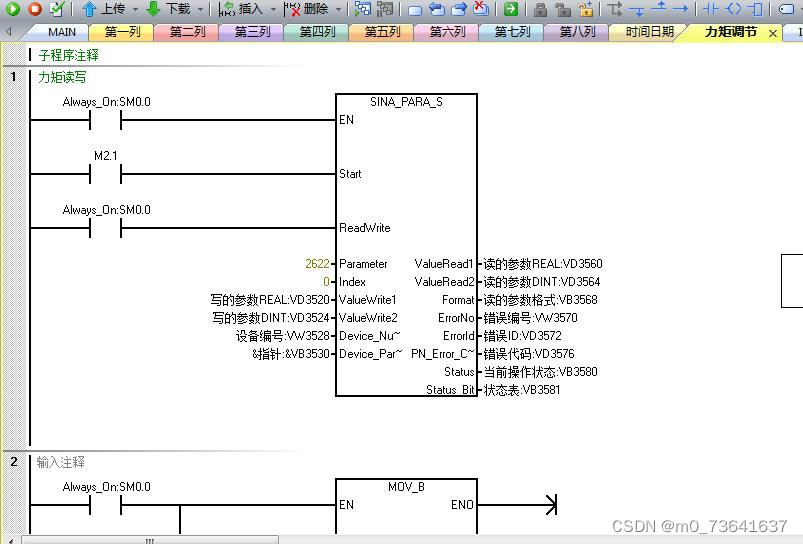
程序编写
启动轴

启动方法

选择工作模式

不同的工作模式详细参照说明手册进行学习配置