前言
机器学习方法主要可以分为四类,监督学习、半监督学习、无监督学习、以及强化学习。其中,强化学习不同于连接主义的监督学习方法,是智能体通过与环境的交互,观测交互结果以及获得相应的回报。这种学习的方式是模拟人或动物的一种学习方式,因此强化学习在机器人领域有着广泛的应用。
传统的强化学习的动作空间和样本空间都很小,且一般是离散的情境下,而实际的任务往往有着很大的状态空间和连续的动作空间。当输入数据为图像,声音时,往往具有很高维度,传统的强化学习很难处理,此时就需要结合深度学习的方法,将高纬度数据进行降维处理,即深度强化学习方法。
讲解主题
主题:深度强化学习在机器人领域的研究与应用
提纲:1、深度强化学习简介
2、(深度)强化学习在机器人领域的研究
3、(深度)强化学习在自动驾驶中的应用
讲解内容
1、深度强化学习简介
还记得那个“围棋天才”AlphaGo吗?它就是强化学习的应用。在本章节中,从深度强化学习在红白机游戏、AlphaGo、AlphaZero 、AlphaStar及机器人完成日常任务的应用案例出发,讲解了深度强化学习的定义,以及深度强化学习中的一些基本方法,如马尔可夫决策过程 (MDP)、动态规划 (DynamicProgramming)、基于价值(Valuebased) 的方法、策略梯度(Policy Gradient) 法,以及Actor-Critic方法等。



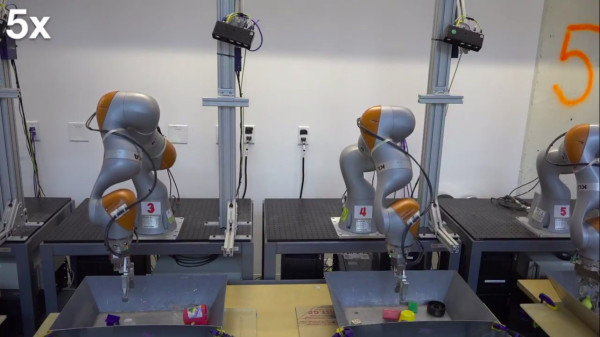
2、(深度)强化学习在机器人领域的研究
机器人是深度强化学习主要的应用领域之一。在这部分,分别围绕机器人抓取、行走、飞行、导航等主要任务,仿真-显示转换、模仿学习、基于模型的强化学习等方面,分析了深度强化学习在机器人领域的研究与应用。




3、(深度)强化学习在自动驾驶中的应用
近年来,自动驾驶发展的如火如荼。本章节从自动驾驶中存在的长尾问题出发,介绍一些常见的自动驾驶仿真器,并重点分析了模仿学习的原理及在自动驾驶仿真器中的应用。



【注:本文参考智东西公开课公众号课件(已授权)】
附:微信文章发布平台为allplusai