文章目录
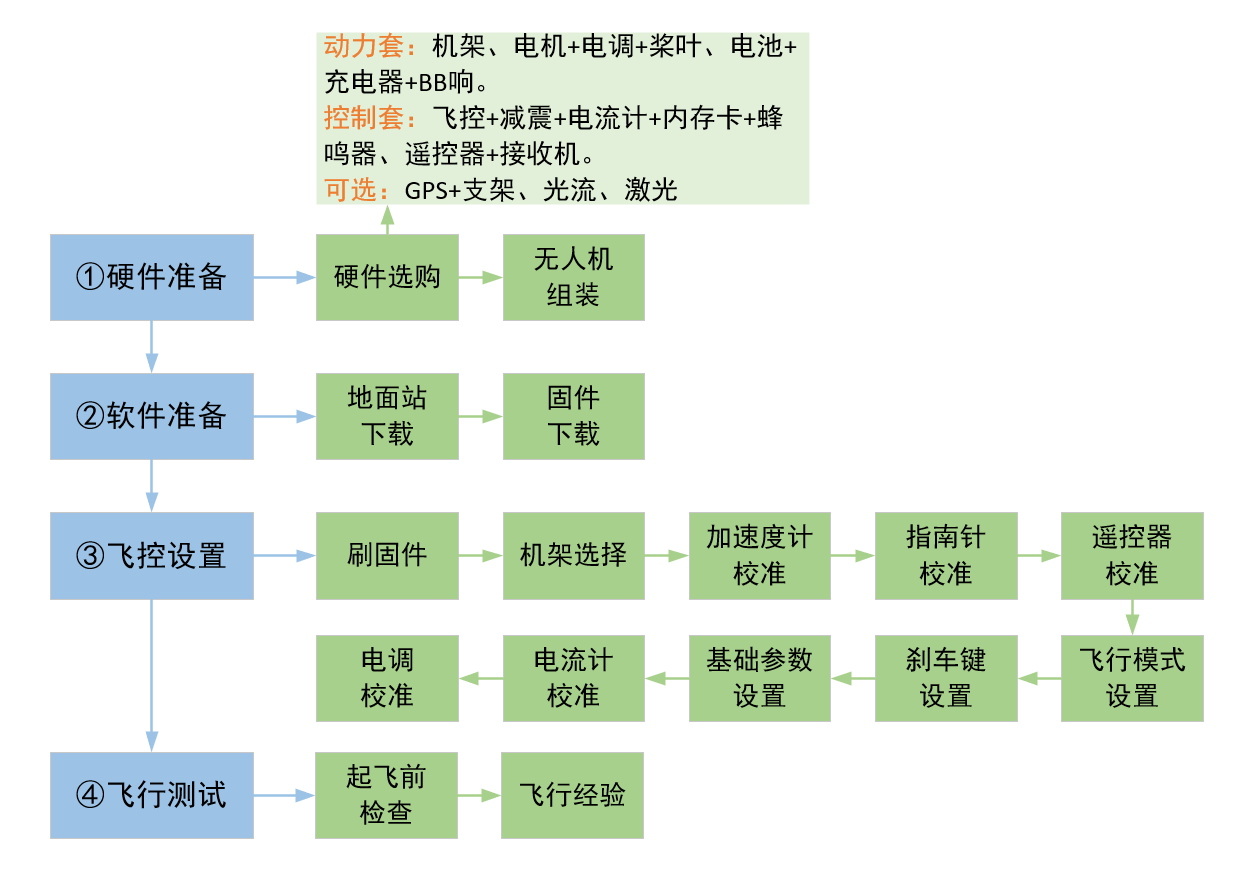
- 整体流程图:
- 相关网址汇总:
- 入门常识:
- 一、硬件准备
- 二、软件准备
- 1 已实飞测试
- 2 MP地面站 任意版本下载:
- 3 APM固件 任意版本下载:
- 三、飞控校准
- 1 刷固件
- 2 机架选择
- 3 加速度计校准
- 4 指南针校准
- 5 遥控器校准
- 6 飞行模式
- 7 紧急断电&无头模式
- 8 基础参数设置
- 9 电流计校准
- 10 电调校准
- 11 起飞前检查(每一项都非常重要)
- 12 飞行经验
- 四、遇到的问题
- 1 MP地面站没有显示 全部参数:
- 2 炸鸡—气压计定高—飞机冲天:
- 3 飞控突然无法连接地面站
- 4 使用权盛光流,飞机画圆
- 5 数传很慢
- 6 定点模式,飞机移动很慢
- 7 光流自带超声波,定高不稳
- 8 突然无法解锁,又没报任何错误
- 9 光流超声波定高0.5米还行,再高就不行了
- 五、其他外设
- 0 APM常用参数
- 1 灯语、蜂鸣器
- 2 数传
- 3 权盛光流
- 4 GPS
- 5 TFmini Plus
- 6 KS103
- 7.CC2530数传-深联创新
- 8.富斯i6s遥控器
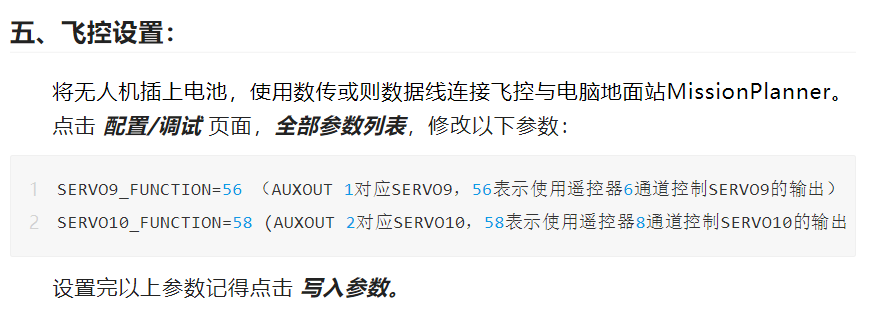
- 9.两个舵机
整体流程图:
相关网址汇总:
APM固件:
pix2.4.8参考教程(齐全但古老)
APM固件下载:官网
MP地面站下载:官网
APM日志分析:基础使用 -苍穹(日志默认周期:100ms)
APM日志分析:诊断问题 -苍穹
定高:TFmini plus -苍穹
定高:TFmini plus -官方
舵机:苍穹
硬件:
硬件扫盲:基础知识 -苍穹
装机教程:F450四轴 -苍穹
硬件选型:电机、电调、电池
视频:
飞控校准:Pix2.4.8,APM固件
飞控校准:Pix2.4.8,PX4固件
浙大教程:从0制作自主空中机器人
入门常识:
(1)飞控包含硬件和软件,硬件是飞控板子,软件就是飞控固件。apm和px4说的是飞控软件也就是固件,pixhawk2.4.8说的是硬件,也就是那块板子。
(2)常见的固件:APM、PX4。还有其他的我没用过。
(3)常见的硬件:pixhawk2.4.8(没有官方,是国内厂家参考3dr的pixhawk1改的,古老但便宜)。官方认证的厂家:holybro的pixhawk系列pix456,雷讯的v3v5等等。这些都是硬件,有的可以运行APM固件,有的可以运行PX4固件,大多数硬件是两种固件都支持。所以pix2.4.8既可以下APM固件,又可以下PX4固件。
(4)地面站:有MP、QGC。MP对APM固件兼容性好,所以一般用APM固件,就会用MP地面站。QGC对PX4固件的兼容性好,用PX4固件,就用QGC地面站来调试飞控。
一、硬件准备
稳定飞行的前提:
- 合适的动力套配置
- 正确的飞控接线
二、软件准备
写在前面: 建议第一次用的话,用商家提供的 地面站和固件版本。
因为MP版本和APM版本的适配问题,真的真的是很大一个坑。最好先走别人走过的路,走通了再去自由发挥,不然白白浪费时间。
下面提供我试飞成功过的版本。
下面提供任意版本固件和地面站的下载方法。
1 已实飞测试
-
已测试的组合
已测试:远航2.4.8飞控,权盛光流固件3.4.3,地面站1.3.39。姿态飞。
已测试:权盛2.4.8飞控,权盛光流固件3.4.3,地面站1.3.39。权盛光流测试,定高还行,定点不行直接发散,可能是飞机动力配置问题。
-
权盛推荐(已测试)
MP地面站:1.3.39
APM固件:3.4.3(权盛光流固件)
下载链接:https://wwzr.lanzout.com/b047plhwh 密码:123
2 MP地面站 任意版本下载:
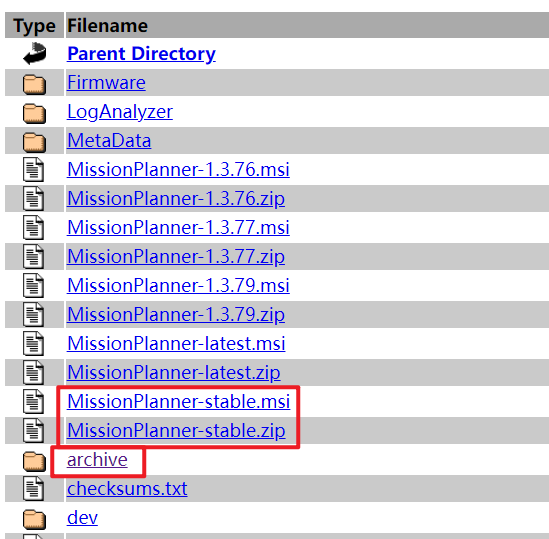
官网下载:https://firmware.ardupilot.org/Tools/MissionPlanner/
“archive” 里有旧版本的。.msi 是需要安装的。.zip是绿色不需要安装直接解压使用的。
需要注意的是:电脑如果是第一次安装地面站,要选.msi的,因为在安装过程中会安装所需的驱动。
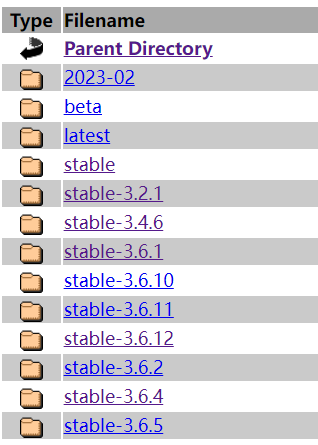
3 APM固件 任意版本下载:
官网下载:https://firmware.ardupilot.org/Copter/
下载任意版本教程:http://pix.1yuav.com/ru-he-huo-qu-li-xian-gu-jian.html
总结,自己下载固件时会有这些选项:PX4、fmu v2、fmu v3。
pix2.4.8选择是:有v3选v3,没有v3选v2,没有v2选px4 quad(四轴)。
三、飞控校准
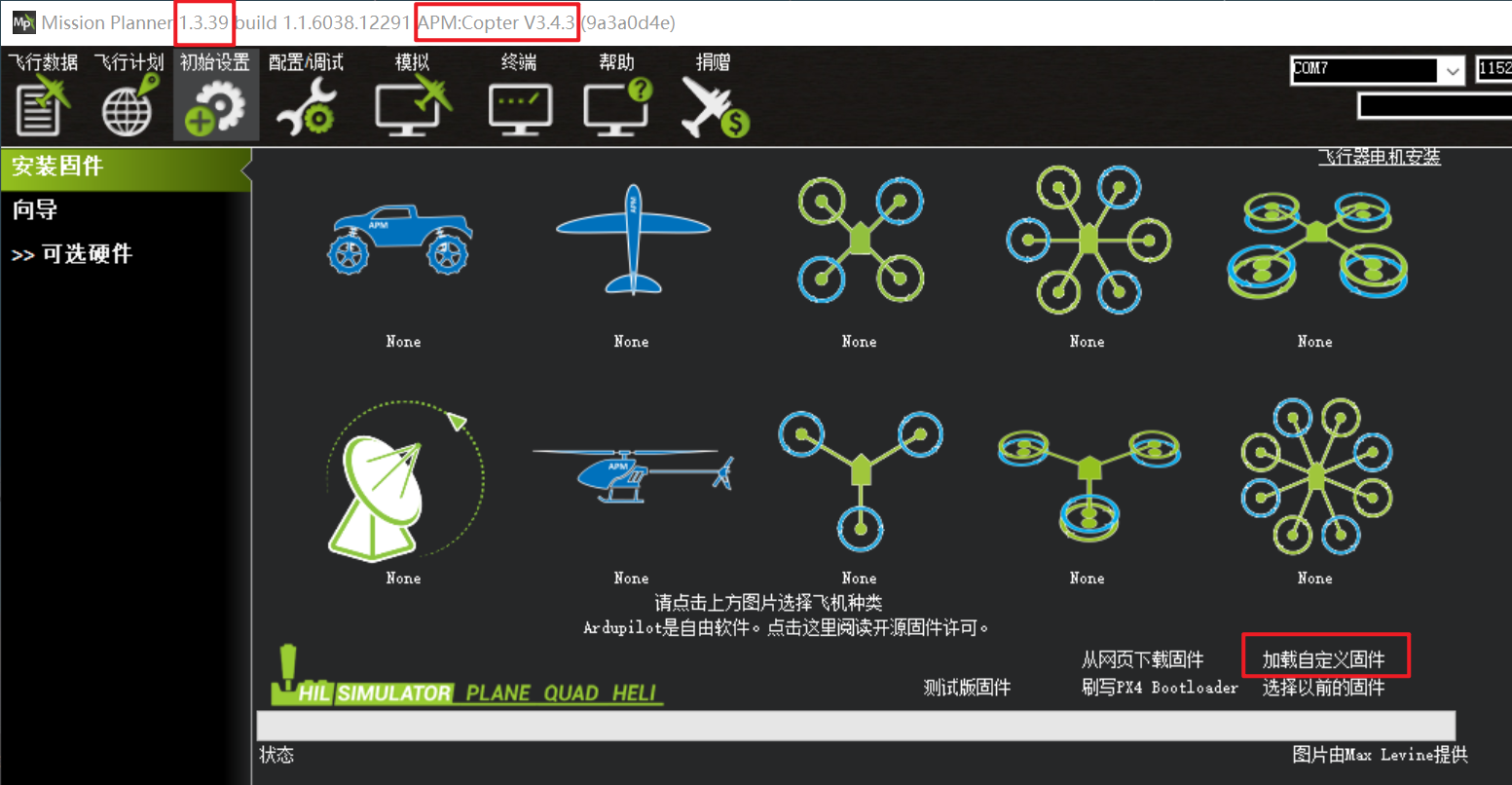
1 刷固件
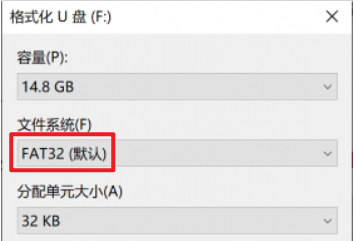
必须用USB供电。
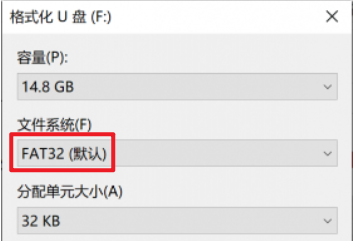
内存卡要安好,不然可能刷好固件无法连接地面站。受2.4.8硬件限制,内存卡最好小于16G,格式必须是FAT32。
如果出现刷不进固件,连接不到地面站的问题,可以考虑下内存卡问题。
2 机架选择
- 机架我是四旋翼。
- 接下来校准按这个顺序来。
下面的校准每一项都是必要的,特别是:别疏忽掉 电流计 和 电调,会炸鸡。

3 加速度计校准
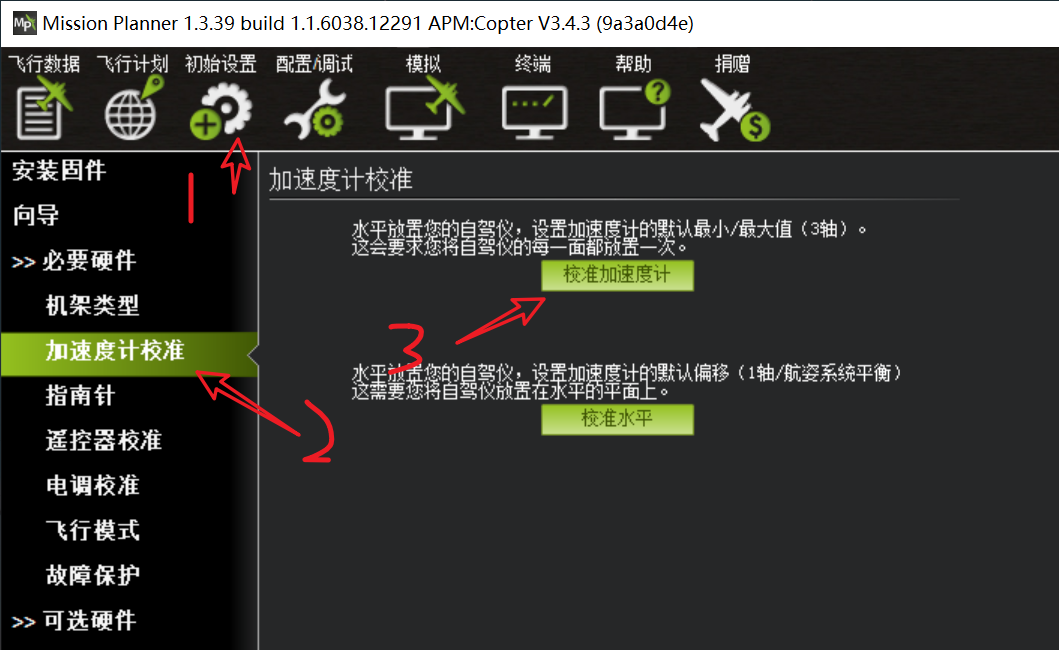
Place vehicle level and press any key(飞机水平放置)完成后回车
Place vehicle on its LEFT side and press any key(飞控面 向左边放置)完成后回车
Place vehicle on its RIGHT side and press any key(向右边放置)完成后回车
Place vehicle nose DOWN and press any key(向下放置)完成后回车
Place vehicle nose UP and press any key(向上放置)完成后回车
Place vehicle on its BACK and press any key(反过来放置)完成后回车
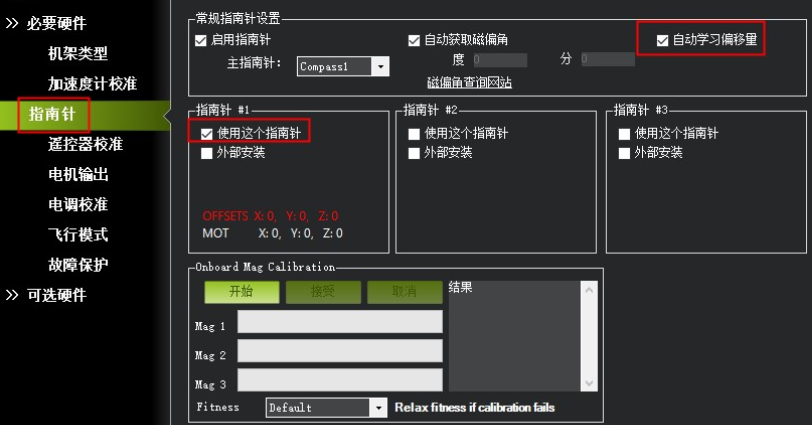
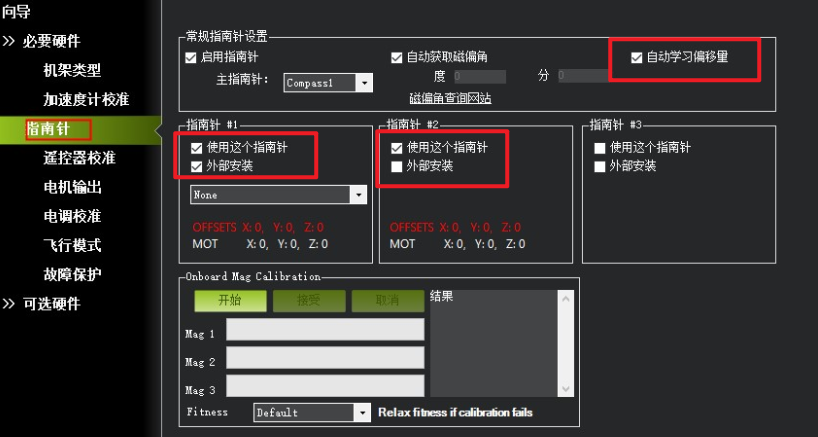
4 指南针校准
无GPS:
有GPS:
5 遥控器校准
需要注意的是:APM固件,遥控器pitch通道要设置为反向。富斯i6s遥控器对应的是通道2要设置反向。
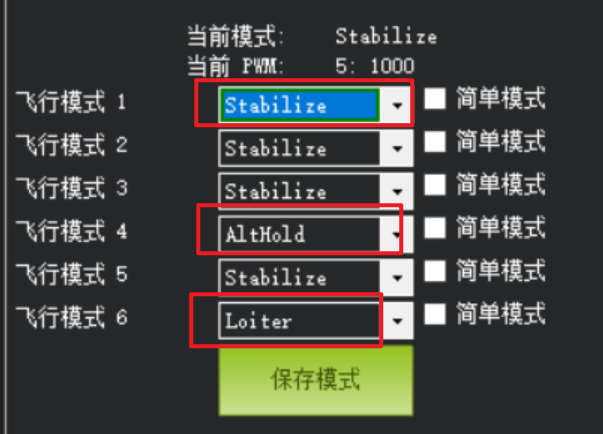
6 飞行模式
APM固件默认 通道5 为设置飞行模式通道。
姿态、定高、定点。
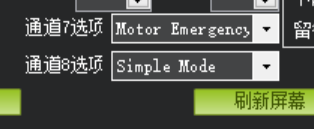
7 紧急断电&无头模式
配置调试选项,扩展参数。
通道7,设置为:Motor Emergency …
通道8,设置为 simple mode
遥控器上对应的也要设置好通道。

通道8,设置为简单模式(无头模式)切换键。
8 基础参数设置
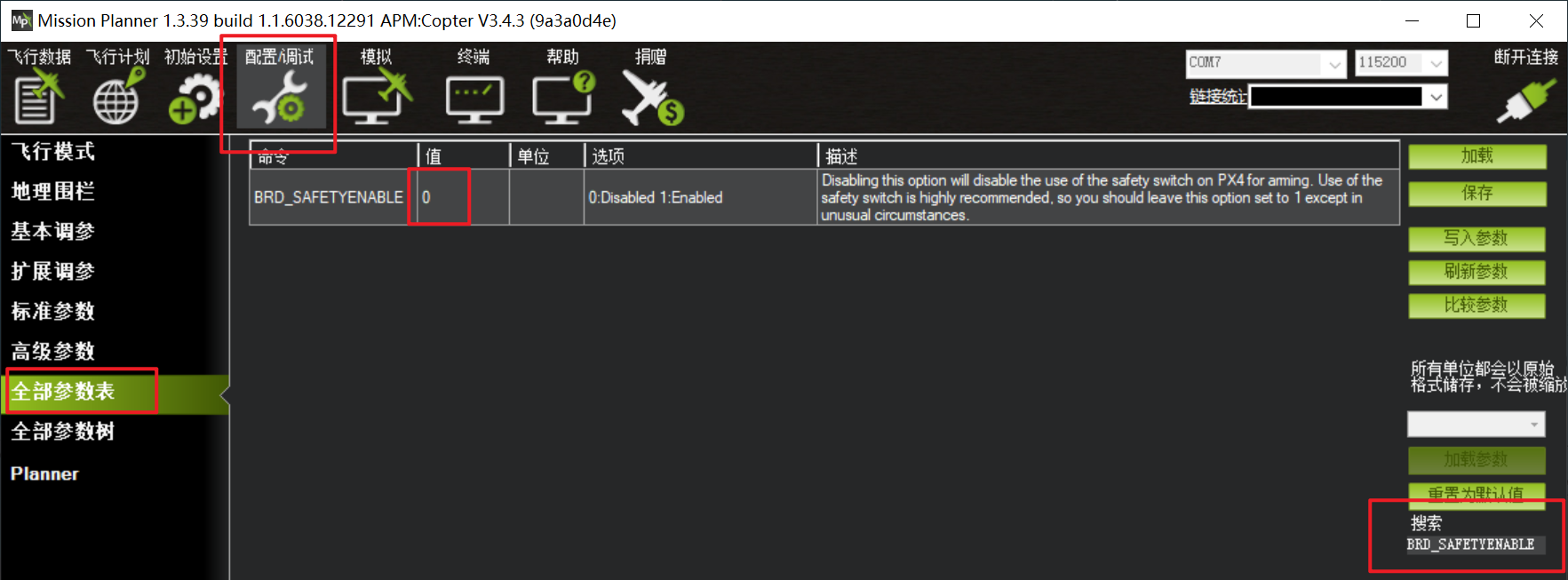
禁用安全开关:BRD_SAFETYENABLE 0 (飞机没装安全开关的话,就必须设置)
9 电流计校准
最好用数传校准,USB线麻烦的很

10 电调校准
首先需要禁用安全开关。 主要是因为我飞机上没装安全开关。
| 功能 | 参数 | 值 |
|---|---|---|
| 禁用安全开关 | BRD_SAFETYENABLE | 0 |
我试了,自动校准不行。
手动校准步骤:断开飞行器所有电源,遥控器油门拉到最高并保持。插上电池,看到飞控红绿黄闪烁,断开电池,再插上电池,电调滴滴两声,油门拉到最低,电调滴一声,校准完成。
11 起飞前检查(每一项都非常重要)
一定要检查好再飞
疏忽了,就炸鸡
炸鸡了,场面惨烈,心里阴影,
-
电机转向 是否正确 (飞机解锁,轻推油门,用手摸)
-
姿态 是否正常(地面站上看)
-
刹车键 是否正常(不装桨叶,解锁飞机,遥控器扣下刹车键)
-
飞行模式 是否正常(遥控器切换,地面站上看)
-
(可选)光流数据(超声波、光流)是否正常。(没用光流就不管)
12 飞行经验
- 第一个是抓遥控器的手势。
四、遇到的问题
1 MP地面站没有显示 全部参数:
解决方法:https://blog.csdn.net/liberatetheus/article/details/77970479
2 炸鸡—气压计定高—飞机冲天:
权盛光流固件3.4.3,姿态模式飞行正常,飞行时切换定高,冲天了。
权哥给的思路是:可能是飞控减震问题,导致的这种现象。
后面换了超声波就没这样。
3 飞控突然无法连接地面站
-
固件:光流3.4.3 地面站:1.3.39
-
解决:电池上电后就可以了。猜测是没电池供电,没过自检?怎么会影响到连接地面站。
-
真实原因:内存 卡问题,换了内存卡好了。不知是满了还是坏了。内存卡没满,格式化后也好了。
-
内存卡:最好是小于16G,格式必须是FAT32。
4 使用权盛光流,飞机画圆
-
定点模式,有定点效果,说明光流是能用,就是逐渐发散,飞机画圆飞,定高时电机有一冲一冲的现象。
-
猜测原因:一开始觉得是飞机动力不足。
s500机架,10寸桨,
银燕2216 kv810电机,
好盈乐天40A电调
3300mah 25c 4s。
权哥说不是动力问题。目前不明原因。
-
我猜测可能是动力套的搭配问题,比较明显的问题是 电池放电能力3.3x25=82.5A 和 电调最高电流40x4=160A 不符,按道理电池放电能力应该大于电调最大电流。【下次试试换高C电池】
-
2.13,换了大容量电池,定点可以了,还存在的问题就是定高不稳,上上下下的,电机也一冲一冲的。
3300换成了5300
5 数传很慢
- 奇怪了,数传连接很慢,而且没法去校准电流计。
- 猜测是固件版本、地面站版本太低??
6 定点模式,飞机移动很慢
- 用错模式了,Loiter本来就很慢
- 应该用poshold
- 雷迅:https://doc.cuav.net/tutorial/copter/flight-modes/poshold.html
7 光流自带超声波,定高不稳
- 权哥说,是飞控没减震的问题
- 解决:加了减震,果然不一样!!!
- 减震YYDS!
8 突然无法解锁,又没报任何错误
- 就很迷
- 解决:遥控器重新校准
9 光流超声波定高0.5米还行,再高就不行了
- 猜测是超声波问题,一个是安装问题,震动?一个是超声波本身有问题。
- 日志里读出的超声波数据也是不对劲,一会儿平,一会儿全是上上下下
五、其他外设
0 APM常用参数
| 功能 | 参数 | 值 |
|---|---|---|
| 禁用安全开关 | BRD_SAFETYENABLE | 0 |
| 电机怠速值设为0 | MOT_SPIN_ARM | 0 |
| 电机解锁检查 | ARMING_CHECK | 64 |
| 一上电就开始记录日志,直到断电 | LOG_DISARMED | 1 |
1 灯语、蜂鸣器
黄色双闪:自检失败。
蓝闪烁:无GPS,未解锁。
蓝常亮:已解锁。
绿闪烁:有GPS,未解锁。
绿常亮:已解锁。

2 数传
飞控默认:数传连接波特率是57600,USB连接是115200。别选错。
权盛数传设置:数传用USB连接电脑,选择好串口和波特率,但不点连接。
主要是更改图里的 网络ID 和 通道,两个配置一样就可以正常通信了。

3 权盛光流
- 看他的教程文档。
- 主要是:专用固件,接线,安装朝向,地面站配置。
4 GPS
5 TFmini Plus
6 KS103
7.CC2530数传-深联创新
- 官网:https://m.tb.cn/h.fz30J3c?tk=PXUC2HpHN5w
- 配对:长按按键后上电。依次设置波特率、设置信道、设置工作模式。
8.富斯i6s遥控器
- 官网:FS-i6S (flyskytech.com)
- 配对:遥控器打开对码。接收机B/VCC口短接后上电。
9.两个舵机
看苍穹的教程。
- 舵机供电
- 遥控器设置
- 飞控设置