不同坐标系之间的刚性转换以及实现:
坐标系转换原理如下,使用了仿射变换实现了旋转平移:
[ r 11 r 12 t x r 21 r 22 t y 0 0 ] ∗ [ x y 1 ] = [ x ′ y ′ 1 ] \begin{bmatrix} r_{11} & r_{12}& t_x\\ r_{21}& r_{22}& t_y\\ 0 & 0& \end{bmatrix}* \begin{bmatrix} x \\ y \\ 1 \end{bmatrix}= \begin{bmatrix} x^{'} \\ y^{'} \\ 1 \end{bmatrix} r11r210r12r220txty ∗ xy1 = x′y′1
但是在eigen中求取方程式 A ∗ x = b A*x=b A∗x=b,所以前面可以将 [ x y z ] \begin{bmatrix} x \\ y \\ z \end{bmatrix} xyz 看成是A,把 [ x ′ y ′ z ′ ] \begin{bmatrix} x^{'} \\ y^{'} \\ z^{'} \end{bmatrix} x′y′z′ 看成是 b b b。不过这样公式就需要一定的变形才能和前面的对应起来,前后做一个转置,如下所示:
[ [ r 11 r 12 t x r 21 r 22 t y 0 0 ] ∗ [ x y 1 ] ] T = [ x ′ y ′ 1 ] T \left [ \begin{bmatrix} r_{11} & r_{12}& t_x\\ r_{21}& r_{22}& t_y\\ 0 & 0& \end{bmatrix}*\\ \begin{bmatrix} x \\ y \\ 1 \end{bmatrix}\\ \right ] ^{T}= \begin{bmatrix} x^{'} \\ y^{'} \\ 1 \end{bmatrix}^{T} r11r210r12r220txty ∗ xy1 T= x′y′1 T
那么就会转换成如下所示:
[ x y 1 ] ∗ [ r 11 r 21 0 r 12 r 22 0 t x t y 1 ] = [ x ′ y ′ 1 ] \begin{bmatrix} x &y &1 \end{bmatrix} *\begin{bmatrix} r_{11} & r_{21}& 0\\ r_{12}& r_{22}& 0\\ t_x & t_y&1 \end{bmatrix}=\begin{bmatrix} x^{'} & y^{'} & 1 \end{bmatrix} [xy1]∗ r11r12txr21r22ty001 =[x′y′1]
所以最终在程序里使用的是上面的公式,调用A.fullPivLu().solve(B)计算的时候也是A对应 [ x y 1 ] \begin{bmatrix} x &y &1 \end{bmatrix} [xy1],B对应的就是 [ x ′ y ′ 1 ] \begin{bmatrix} x^{'} & y^{'} & 1 \end{bmatrix} [x′y′1]。所以得出来的结果也是 [ r 11 r 21 0 r 12 r 22 0 t x t y 1 ] \begin{bmatrix} r_{11} & r_{21}& 0\\ r_{12}& r_{22}& 0\\ t_x & t_y&1 \end{bmatrix} r11r12txr21r22ty001 。看自己需求是否对其转置
A << -4.93374, -0.056378, 1, 0.397714, -0.126519, 1, 2.63284, -0.0925265, 1;B << 109995, 8318, 1, 110066, 13650, 1, 110032, 15885, 1;
Eigen::Matrix3d T = TransMatrix(A, B);
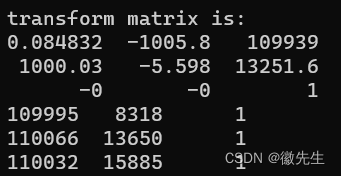
cout << "transform matrix is: " << "\n";
cout << T.transpose() << endl;//显示出A*T=B,但是实际计算的是(T的转置*A的转置)的转置=B的转置
cout << A*T << endl;
转换矩阵结果如下所示: