⛄一、天牛须搜索算法简介
1 天牛须搜索算法定义
天牛须搜索(Beetle Antennae Search-BAS),也叫甲壳虫须搜索,是2017年提出的一种高效的智能优化算法。类似于遗传算法、粒子群算法、模拟退火等智能优化算法,天牛须搜索不需要知道函数的具体形式,不要虚梯度信息,就可以实现高效寻优。相比于粒子群算法,天牛须搜索只只要一个个体,即一个天牛,运算量大大降低。
2 原理及代码实现
2.1 仿生原理
天牛须搜索时受到天牛觅食原理启发而开发的算法。
生物原理:当天牛觅食时,天牛并不知道食物在哪,而是根据食物气味的强弱来觅食。天牛有俩只长触角,如果左边触角收到的气味强度比右边大,那下一步天牛就往左飞,否则就往右飞。根据这一简单原理天牛就可以有效找到食物。
天牛须搜索得来的启发:食物的气味就相当于一个函数,这个函数在三维空间每个点值都不同,天牛两个须可以采集自身附近两点的气味值,天牛的目的是找到全局气味值最大的点。仿照天牛的行为,我们就可以高效的进行函数寻优。
2.2 算法
天牛在三维空间运动,而天牛须搜索需要对任意维函数都有效才可以。因而,天牛须搜索是对天牛生物行为在任意维空间的推广。采用如下的简化模型假设描述天牛:
天牛左右两须位于质心两边。
天牛步长step与两须之间距离d0的比是个固定常数,即step=c*d0,其中c是常数。即,大天牛(两须距离长)走大步,小天牛走小步。
天牛飞到下一步后,头的朝向是随机的。
2.3 建模:(n维空间函数f最小化)
第一步:对一个n维空间的优化问题,我们用xl表示左须坐标,xr表示右须坐标,x表示质心坐标,用d0表示两须之间的距离。根据假设3,天牛头朝向任意,因而从天牛右须指向左须的向量的朝向也是任意的,所以可以产生一个随机向量dir=rands(n,1)来表示它。对此归一化:dir=dir/norm(dir);我们这样可以得到xl-xr=d0dir;显然,xl,xr还可以表示成质心的表达式;xl=x+d0dir/2;xr=x-d0dir/2。
第二步:对于待优化函数f,求取左右两须的值:felft=f(xl);fright=f(xr);判断两个值大小,如果fleft<fright,为了探寻f的最小值,则天牛向着左须方向行进距离step,即x=x+stepnormal(xl-xr);如果fleft>fright,为了探寻f的最小值,则天牛向着右须方向行进距离step,即x=x-stepnormal(xl-xr);如以上两种情况可以采用符号函数sign统一写成:x=x-stepnormal(xl-xr)sign(fleft-fright)=x-stepdir*sign(fleft-fright)。
(注:其中normal是归一化函数)
循环迭代:
dir=rands(n,1);dir=dir/norm(dir);%须的方向
xl=x+d0dir/2;xr=x-d0dir/2;%须的坐标
felft=f(xl);fright=f(xr);%须的气味强度
x=x-stepdirsign(fleft-fright)。%下一步位置
关于步长:
两种推荐:
每步迭代中采用step=etastep,其中eta在0,1之间靠近1,通常可取eta=0.95;
引入新变量temp和最终分辨率step0,temp=etatemp,step=temp+step0.
关于初始步长:初始步长可以尽可能大,最好与自变量最大长度相当。
⛄二、ELMAN神经网络简介
1 Elman网络特点
Elman神经网络是一种典型的动态递归神经网络,它是在BP网络基本结构的基础上,在隐含层增加一个承接层,作为一步延时算子,达到记忆的目的,从而使系统具有适应时变特性的能力,增强了网络的全局稳定性,它比前馈型神经网络具有更强的计算能力,还可以用来解决快速寻优问题。
2 Elman网络结构
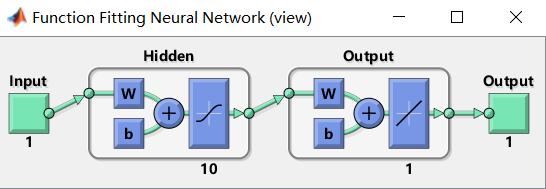
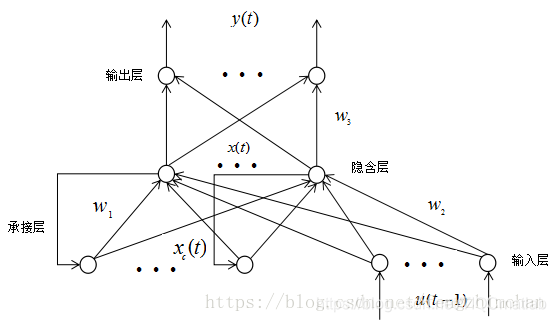
Elman神经网络是应用较为广泛的一种典型的反馈型神经网络模型。一般分为四层:输入层、隐层、承接层和输出层。其输入层、隐层和输出层的连接类似于前馈网络。输入层的单元仅起到信号传输作用,输出层单元起到加权作用。隐层单元有线性和非线性两类激励函数,通常激励函数取Signmoid非线性函数。而承接层则用来记忆隐层单元前一时刻的输出值,可以认为是一个有一步迟延的延时算子。隐层的输出通过承接层的延迟与存储,自联到隐层的输入,这种自联方式使其对历史数据具有敏感性,内部反馈网络的加入增加了网络本身处理动态信息的能力,从而达到动态建模的目的。其结构图如下图1所示,
其网络的数学表达式为:




3 Elman网络与BP网络的区别
它是动态反馈型网络,它能够内部反馈、存储和利用过去时刻输出信息,既可以实现静态系统的建模,还能实现动态系统的映射并直接反应系统的动态特性,在计算能力及网络稳定性方面都比BP神经网络更胜一筹。
4 Elman网络缺点
与BP神经网络一样,算法都是采用基于梯度下降法,会出现训练速度慢和容易陷入局部极小点的缺点,对神经网络的训练较难达到全局最优。
⛄三、部分源代码
clear all
clc
%% bas优化elman网络
%% 自变量个数
x_number=49;
%% 因变量个数
y_number=1;
%% 网络节点个数
inputnum=x_number; % 输入层
hiddennum=50; % 隐含层
outputnum=y_number; % 输出层
iterations=2000; % 迭代次数
%% 导入数据
[data_train,~,raw_train]=xlsread(‘train.xlsx’);
[data_predict,~,raw_predict]=xlsread(‘predict.xlsx’);
%% 自变量
x_train=data_train(2:366,5:end);
x_test=data_train(367:397,5:end);
%% 因变量
y_train=data_train(367:731,6);
y_test=data_predict(2:end,6);
%% 自变量归一化
[x,xn]=mapminmax([x_train;x_test]‘,-1,1);
trainx=x(:,1:size(x_train,1));
testx=x(:,size(x_train,1)+1:end);
%% 因变量归一化
[trainy,yn]=mapminmax(y_train’,-1,1);
%% 维度
global dim
dim=inputnumhiddennum+hiddennumhiddennum+outputnumhiddennum+hiddennumoutputnum+outputnum;
%% 构建神经网络
net=newelm(trainx,trainy,hiddennum,{‘tansig’,‘purelin’},‘traingdm’); %% ELman网络训练
%% 天牛左右须距离
d0=0.5;
%% 系数
c=2;
%% 初始化步进长度
step=2;
%% 最大值
popmax=0.5;
%% 最小值
popmin=-0.5;
%% 步长更改系数
eta=0.995;
%% 自变量个数
nvars=dim;
%% 初始化
x=popmin+(popmax-popmin)*rand(1,nvars);
%% 记录每次迭代的最优个体
xbest=x;
%% 记录最优值
fbest=fun(xbest,inputnum,hiddennum,outputnum,net,trainx,trainy);
fbest_store=fbest; % 记录每次迭代的最优值
% figure(1)
% plot(1,fbest,‘k.’,‘linewidth’,2)
% hold on
% title([‘bas优化最优解:’,num2str(fbest)],‘fontsize’,30)
% pause(0.1)
function error = fun(x,inputnum,hiddennum,outputnum,net,inputn,outputn)
%% 该函数用来计算适应度值
%% 提取个体
iw1=x(1:inputnumhiddennum);
lw1=x(inputnumhiddennum+1:inputnumhiddennum+hiddennumhiddennum);
lw2=x(inputnumhiddennum+hiddennumhiddennum+1:inputnumhiddennum+hiddennumhiddennum+outputnum*hiddennum);
b1=x(end-outputnum-hiddennum+1:end-outputnum);
b2=x(end-outputnum+1:end);
%% 网络权值赋值
net.iw{1,1}=reshape(iw1,hiddennum,inputnum);
net.lw{1,1}=reshape(lw1,hiddennum,hiddennum);
net.lw{2,1}=reshape(lw2,outputnum,hiddennum);
net.b{1}=b1’;
net.b{2}=b2’;
% %设置训练参数
% net.trainParam.show=100; %每100代显示
% net.trainParam.mem_reduc=1;
% net.trainParam.mc=0.8; %动量因子
% net.trainParam.Ir=0.9; % 学习率
% net.trainParam.epochs=500; %训练的代数
% net.trainParam.goal=0.00001; %目标误差
% net.trainParam.max_fail=100;
% % 训练向前向神经网络
% net=train(net,inputn,outputn);
%% 网络训练
an=sim(net,inputn);
%% 误差
error=mean(mean(abs(an-outputn)));
end
⛄四、运行结果


⛄五、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]瞿红春,许旺山,郭龙飞,朱伟华,高鹏宇.基于IBAS-Elman网络的滚动轴承故障诊断研究[J].机床与液压. 2020,48(16)
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除