这里写目录标题
- PID算法介绍
- 比例环节
- 比例+积分环节
- 比例+积分+微分环节
- 位置式PID
- 增量式PID
- PID参数整定
- 采样周期选择
- PID参数整定方法
- 试凑法
- 临界比例法
- 一般调节法
PID算法介绍
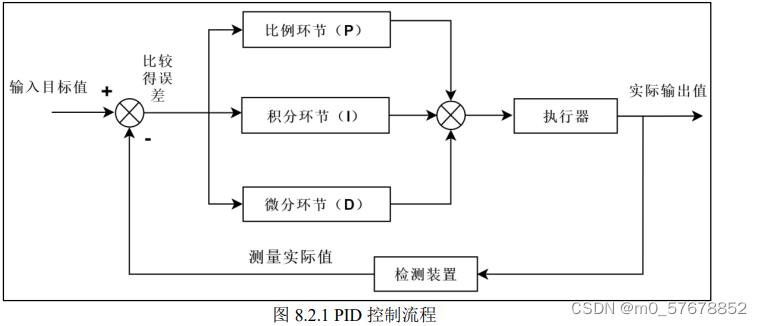
PID 算法是闭环控制系统中常用的算法,PID 分别是 Proportion(比例)、Integral(积分)、
Differential(微分)的首字母缩写。它是一种结合比例、积分和微分三个环节于一体的闭环控
制算法,具体的控制流程如图 8.2.1 所示:
比例环节
u = Kp * e
u ----- 输出
Kp ----- 比例系数
e ----- 偏差
以温度控制系统为例,只采用比例环节的图:
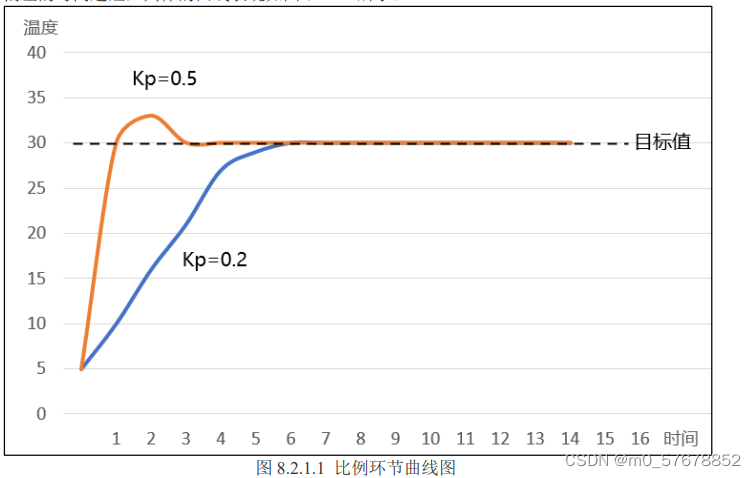
总结:
1.Kp越大,系统响应越快,越快达到目标值。
2.Kp过大会使系统产生较大的超调和振荡,导致系统的稳定性变差。
3.仅有比例环节无法消除静态误差。
比例+积分环节
比例+积分环节的公式如下:
u = Kp * e + Ki * ∑e
u ----- 输出
e ----- 偏差
∑e ----- 累计偏差
Kp ----- 比例系数
Ki ----- 积分系数
以温度控制系统为例,采用比例和积分环节的图:
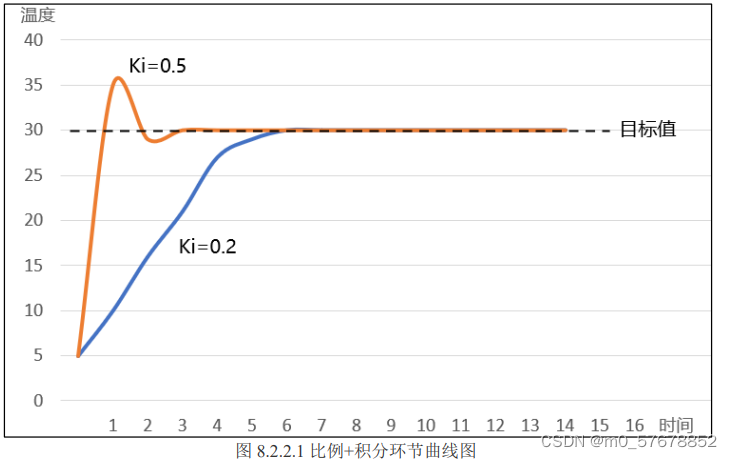
总结:
1.Ki越大,消除静态误差的时间越短,越快达到目标值。
2.Ki过大会使系统产生较大的超调和振荡,导致系统的稳定性变差。
3.对于惯性较大的系统,积分环节动态响应较差,容易产生超调,振荡。
比例+积分+微分环节
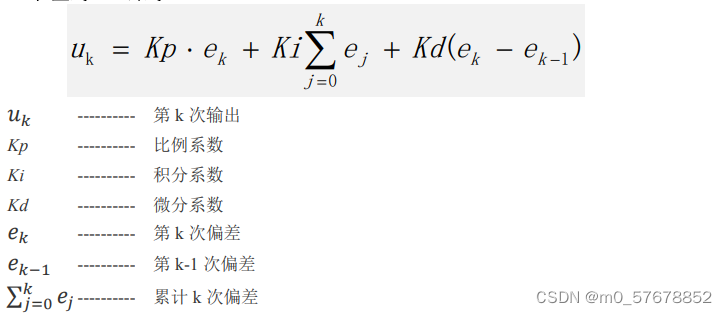
比例+积分+微分环节的公式如下:
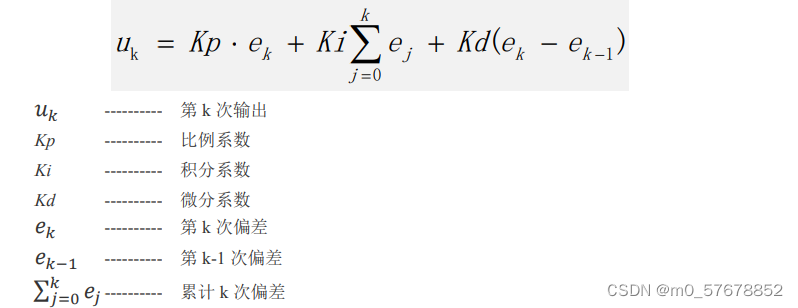
总结:
1.Kd或者变化趋势越大,微分环节作用越强,对超调和振荡的抑制越强。
2.Kd过大会引起系统的不稳定,容易引入高频噪声。
注意:在实际的应用中,并不是每一个系统都需要 PID 的三个环节参与控制的,有的系统只需要比例环节或积分环节就可以控制得很好,除此之外,每一个系统的 PID 系数并不是通用的,这需要根据实际的情况去设置。
位置式PID
位置式PID公式:
1.Uk直接对应对象的输出(位置),如果计算出现异常,对系统影响很大。
2.全量计算,要对偏差e进行累加,计算量大。
3.在不带积分部件的对象中可以得到很好的效果,例如电液伺服,温控设备等。
增量式PID
增量式PID公式推导:
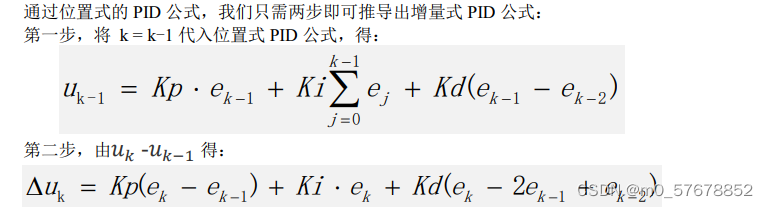
总结:
1.增量式PID计算的是相对上一次输出的增量,即Uk=Uk-1 + ▲Uk。
2.增量只与近三次的偏差有关,计算出现异常对系统工作影响较小。
3.计算量少,是实现相对较好。
注意:增量式 PID 公式输出的只是控制量的增量。
我们以一个实例来理解这句话:假设电机实际转速为 50RPM,现在我们要让它加速到 60RPM,
如果采用的是位置式 PID,系统将直接输出 60RPM 对应的控制量(占空比);
如果采用的是增量式 PID,系统将输出提速 10RPM对应的控制量(占空比),此时我们还需要加上上次(50RPM)的输出。
PID参数整定
采样周期选择
采样周期指的是 PID 控制中实际值的采样时间间隔,其越短,效果越趋于连续,但对硬件资源的占用也越高。
选择范围:
理论:香浓采样定理
这个定理可以用来确定采样周期可选择的最大值,当采样周期超出了这个最大的允许范围,我们所得到的信号就会失真,也就无法较好地还原信号了。
经验:实际值突变能力
根据控制对象突变能力选择。假设电机当前转速为 20RPM,我们需要提高
它的转速到 30RPM,此电机的转速在 1s 之内最大可以突变 10RPM(即电机速度的突变能力),如果我们每 1ms 采集一次电机转速,那么每一次采集到的速度变化量最大为 10RPM / 1000 =0.01RPM,很明显,此时最大变化量远远小于当前的速度,这对于我们的 PID 控制效果并没有明显的升,但是却占用了很多的硬件资源,因此,我们需要根据控制对象的突变力来选择采样周期。
PID参数整定方法
理论计算整定法:
依据系统的数学模型,经过理论计算确定 PID 参数。这种方法是建立在理想化条件下的,其得到的参数不一定能够直接使用,还需要结合经验以及实际的系统进行调整。
工程整定法:
依靠工程经验,直接在控制系统的试验中进行整定,此方法易于掌握,在实际调参中被广泛采用。工程整定法包括:试凑法、临界比例法和一般调节法。
注意:无论采用哪一种方法所得到的 PID 参数,都需要在实际运行中进行最后调整与完善,因此,在 PID 参数整定中,最重要的就是经验的积累。
PID 各个系数调节的效果:
① 比例系数:调节作用快,系统一出现偏差,调节器立即将偏差放大输出。
② 积分系数:积分系数的调节会改变输入偏差对于系统输出的影响程度。积分系数越大,消除静差的时间越短,但是过大的积分系数则会导致系统出现超调现象,这在具有惯性的系统中尤为明显。
③ 微分系数:微分系数的调节是偏差变化量对于系统输出的影响程度。微分系数越大,系统对于偏差量的变化越敏感,越能提前响应,进而抑制超调,但是过大的微分系数则会让整个系统出现振荡。
试凑法
1.内容:
在闭环的控制系统里,将调节器置于纯比例作用下,从小到大逐渐调节比例系数,直到系统曲线出现等幅振荡,再根据经验公式计算参数。
2.
调节思路:
① 先是比例(P),再积分(I),最后是微分(D);
② 按纯比例系统整定比例系数,使其得到比较理想的调节过程曲线,然后再把比例系数缩小 1.2 倍左右,将积分系数从小到大改变,使其得到较好的调节过程曲线;
③ 在这个积分系数下重新改变比例系数,再看调节过程曲线有无改善;
④ 如有改善,可将原整定的比例系数减少,改变积分系数,这样多次的反复,就可得到合适的比例系数和积分系数;
⑤ 如果存在外界的干扰,系统的稳定性不好,可把比例、积分系数适当减小,使系统足够稳定;
⑥ 如果系统存在小幅度超调,可以将整定好的比例系数和积分系数适当减小,增大微分系数,以得到超调量最小、调节作用时间最短的系统曲线;
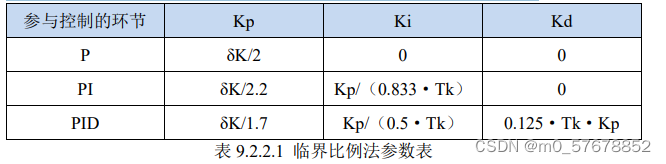
临界比例法
1.内容:
在闭环的控制系统里,将调节器置于纯比例作用下,从小到大逐渐调节比例系数,直到系统曲线出现等幅振荡,再根据经验公式计算参数。
2.调节思路:
① 将积分、微分系数置零,比例度取适当值,平衡操作一段时间,使控制系统按纯比例作用的方式投入运行。
② 慢慢地增大比例系数,细心观察曲线的变化情况。如果控制过程的曲线波动是衰减的,则把比例系数继续增大;如果曲线波动是发散的,则应把比例系数减小,直至曲线波动呈等幅振荡,此时记下临界比例系数 δK 和临界振荡周期 Tk 的值。
③ 根据记下的比例系数和周期,采用经验公式,计算调节器的参数。

一般调节法
1.内容:
这种方法针对一般的 PID 控制系统所以称之为一般调节法。
2.调节思路:
① 首先将积分、微分系数置零,使系统为纯比例控制。控制对象的值设定为系统允许的最大值的 60%~70%,接着逐渐增大比例系数,直至系统出现振荡;此时再逐渐减小比例系数,直至系统振荡消失,然后记录此时的比例系数,并设定系统的比例系数为前值的 60%~70%。
② 确定比例系数后,设定一个较小的积分系数,然后逐渐增大积分系数直至系统出现振荡;此时在逐渐减小积分系数,直至系统振荡消失,然后记录此时的积分系数,并设定系统的积分系数为当前值的 55%~65%。
③ 微分系数一般不用设定,为 0 即可。若系统出现小幅度振荡,并且通过 PI 环节无法优化,这可以采用与确定比例、积分系数相同的方法,微分系数取系统不振荡时的 30%左右。④ 系统空载、带载联调,再对 PID 参数进行微调,直至满足要求。