平台类
GAAS
https://gaas.gitbook.io/
XTDrone
https://www.yuque.com/xtdrone/manual_cn
算法类
EGO
https://github.com/ZJU-FAST-Lab/ego-planner
EGO - (Euclidean signed distance fuction )- (Gradient-based) -(Local Planner for Quadrotors)
3D, 局部路径规划, 避障
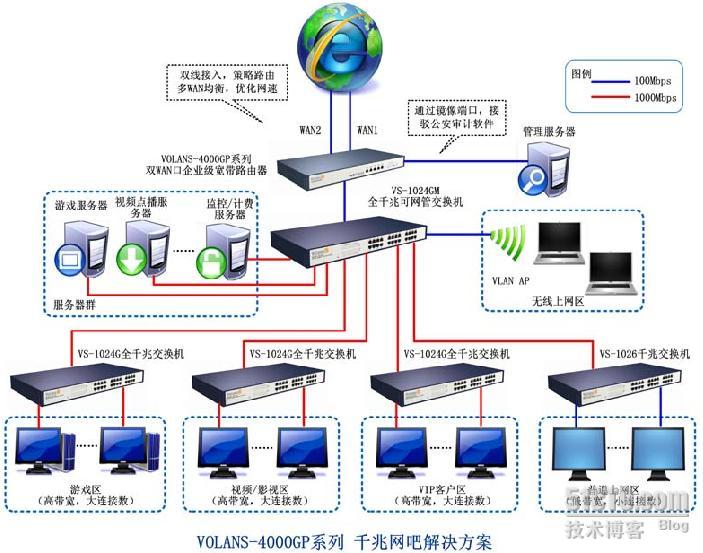
Volans
https://gitee.com/bingobinlw/volans
使用cartographer进行slam建图,然后使用ros::move_base进行路径规划进而控制无人机
2D
NSGA2
https://github.com/CoveyZhang/UAV-Path-Planning
非支配排序遗传算法2: 2D&3D
数值模拟, matlab:

PSO && ABC
基于粒子群和蜂群的全局避障规划算法。
2D,matlab仿真

其余
-
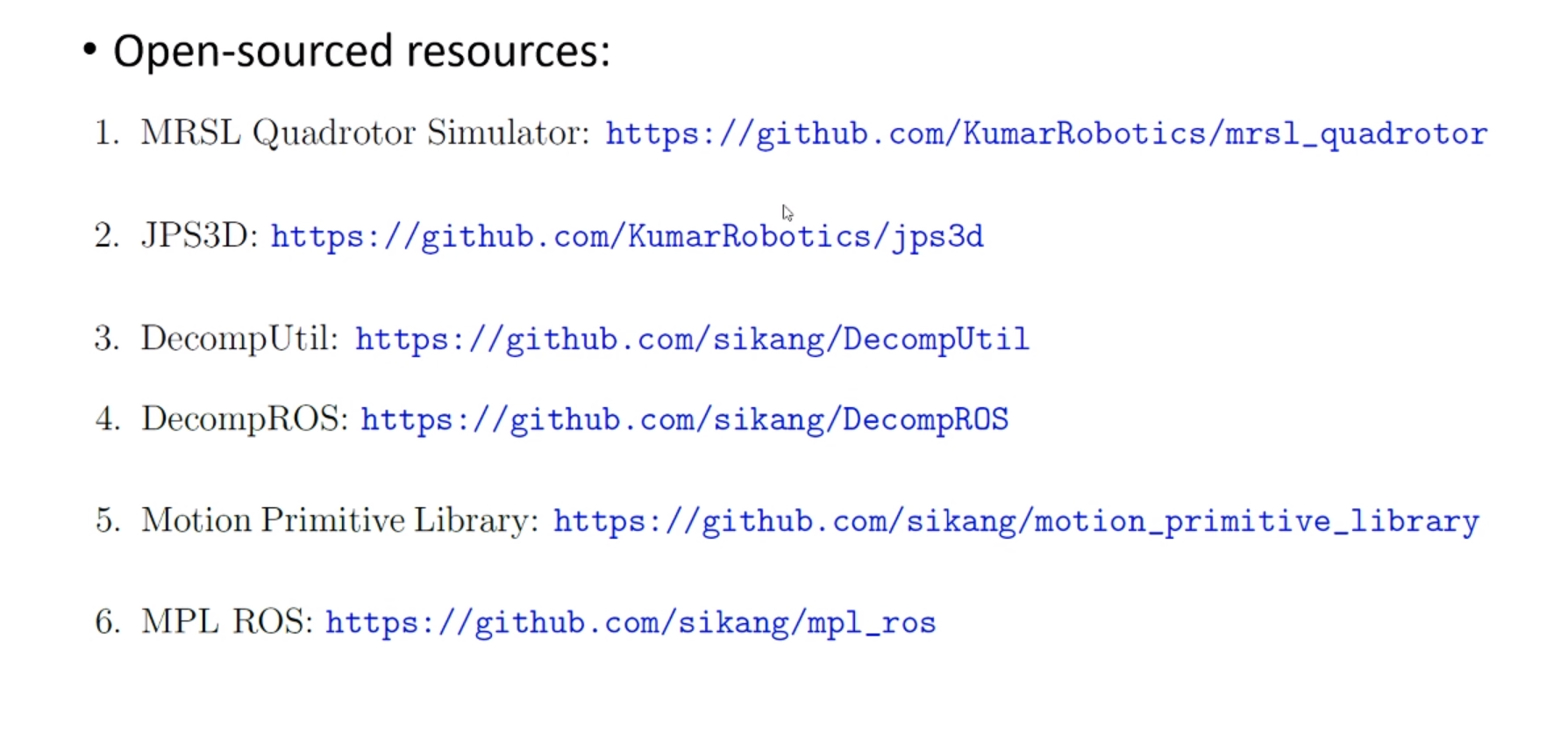
刘思康, Waymo算法工程师,宾夕法尼亚大学Grasp Lab博士,师从Vijay Kumar教授。主要研究方向为无人机的轨迹生成和控制 https://github.com/sikang
-
高飞,博士,2019年8月于香港科技大学机器人研究所获博士学位,2015年于浙江大学自动化专业获学士学位。现任浙江大学控制科学与工程学院特聘副研究员 (Tenure-Track助理教授),他的研究兴趣包括空中无人机、自主导航、运动规划、 环境感知、应用优化算法、视觉定位等 主页:https://ustfei.com/ 课题组github主页:https://github.com/HKUST-Aerial-Robotics
-
路径规划综合包: https://github.com/zhm-real/PathPlanning
. └── Search-based Planning├── Breadth-First Searching (BFS)├── Depth-First Searching (DFS)├── Best-First Searching├── Dijkstra's├── A*├── Bidirectional A*├── Anytime Repairing A*├── Learning Real-time A* (LRTA*)├── Real-time Adaptive A* (RTAA*)├── Lifelong Planning A* (LPA*)├── Dynamic A* (D*)├── D* Lite└── Anytime D* └── Sampling-based Planning├── RRT├── RRT-Connect├── Extended-RRT├── Dynamic-RRT├── RRT*├── Informed RRT*├── RRT* Smart├── Anytime RRT*├── Closed-Loop RRT*├── Spline-RRT*├── Fast Marching Trees (FMT*)└── Batch Informed Trees (BIT*) └── Papers