修改neato_node 下neato.py文件如下:
#!/usr/bin/env python
# ROS node for the Neato Robot Vacuum
# Copyright (c) 2010 University at Albany. All right reserved.
#
# Redistribution and use in source and binary forms, with or without
# modification, are permitted provided that the following conditions are met:
# * Redistributions of source code must retain the above copyright
# notice, this list of conditions and the following disclaimer.
# * Redistributions in binary form must reproduce the above copyright
# notice, this list of conditions and the following disclaimer in the
# documentation and/or other materials provided with the distribution.
# * Neither the name of the University at Albany nor the names of its
# contributors may be used to endorse or promote products derived
# from this software without specific prior written permission.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND
# ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED
# WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
# DISCLAIMED. IN NO EVENT SHALL VANADIUM LABS BE LIABLE FOR ANY DIRECT, INDIRECT,
# INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
# LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA,
# OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF
# LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE
# OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF
# ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
"""
ROS node for Neato XV-11 Robot Vacuum.
"""
__author__ = "ferguson@cs.albany.edu (Michael Ferguson)"
import roslib; roslib.load_manifest("neato_node")
import rospy
from math import sin,cos
from sensor_msgs.msg import LaserScan
from geometry_msgs.msg import Quaternion
from geometry_msgs.msg import Twist
from nav_msgs.msg import Odometry
from tf.broadcaster import TransformBroadcaster
from neato_driver.neato_driver import xv11, BASE_WIDTH, MAX_SPEED
class NeatoNode:
def __init__(self):
""" Start up connection to the Neato Robot. """
rospy.init_node('neato')
self.port = rospy.get_param('~port', "/dev/ttyACM0")
rospy.loginfo("Using port: %s"%(self.port))
self.robot = xv11(self.port)
rospy.Subscriber("cmd_vel", Twist, self.cmdVelCb)
#self.scanPub = rospy.Publisher('base_scan', LaserScan, queue_size=10)
#self.odomPub = rospy.Publisher('odom', Odometry, queue_size=10)
self.scanPub = rospy.Publisher('base_scan', LaserScan)
self.odomPub = rospy.Publisher('odom', Odometry)
self.odomBroadcaster = TransformBroadcaster()
self.cmd_vel = [0,0]
def spin(self):
encoders = [0,0]
self.x = 0 # position in xy plane
self.y = 0
self.th = 0
then = rospy.Time.now()
# things that don't ever change
scan_link = rospy.get_param('~frame_id','base_laser_link')
scan = LaserScan(header=rospy.Header(frame_id=scan_link))
scan.angle_min = 0
scan.angle_max = 6.26
scan.angle_increment = 0.017437326
scan.range_min = 0.020
scan.range_max = 5.0
odom = Odometry(header=rospy.Header(frame_id="odom"), child_frame_id='base_link')
# main loop of driver
r = rospy.Rate(5)
self.robot.requestScan()
while not rospy.is_shutdown():
# prepare laser scan
scan.header.stamp = rospy.Time.now()
#self.robot.requestScan()
scan.ranges = self.robot.getScanRanges()
# get motor encoder values
left, right = self.robot.getMotors()
# send updated movement commands
self.robot.setMotors(self.cmd_vel[0], self.cmd_vel[1], max(abs(self.cmd_vel[0]),abs(self.cmd_vel[1])))
# ask for the next scan while we finish processing stuff
self.robot.requestScan()
# now update position information
dt = (scan.header.stamp - then).to_sec()
then = scan.header.stamp
d_left = (left - encoders[0])/1000.0
d_right = (right - encoders[1])/1000.0
encoders = [left, right]
dx = (d_left+d_right)/2
dth = (d_right-d_left)/(BASE_WIDTH/1000.0)
x = cos(dth)*dx
y = -sin(dth)*dx
self.x += cos(self.th)*x - sin(self.th)*y
self.y += sin(self.th)*x + cos(self.th)*y
self.th += dth
# prepare tf from base_link to odom
quaternion = Quaternion()
quaternion.z = sin(self.th/2.0)
quaternion.w = cos(self.th/2.0)
# prepare odometry
odom.header.stamp = rospy.Time.now()
odom.pose.pose.position.x = self.x
odom.pose.pose.position.y = self.y
odom.pose.pose.position.z = 0
odom.pose.pose.orientation = quaternion
odom.twist.twist.linear.x = dx/dt
odom.twist.twist.angular.z = dth/dt
# publish everything
self.odomBroadcaster.sendTransform( (self.x, self.y, 0), (quaternion.x, quaternion.y, quaternion.z, quaternion.w),
then, "base_link", "odom" )
self.scanPub.publish(scan)
self.odomPub.publish(odom)
# wait, then do it again
r.sleep()
# shut down
self.robot.setLDS("off")
self.robot.setTestMode("off")
def cmdVelCb(self,req):
x = req.linear.x * 1000
th = req.angular.z * (BASE_WIDTH/2)
k = max(abs(x-th),abs(x+th))
# sending commands higher than max speed will fail
if k > MAX_SPEED:
x = x*MAX_SPEED/k; th = th*MAX_SPEED/k
self.cmd_vel = [ int(x-th) , int(x+th) ]
if __name__ == "__main__":
robot = NeatoNode()
robot.spin()
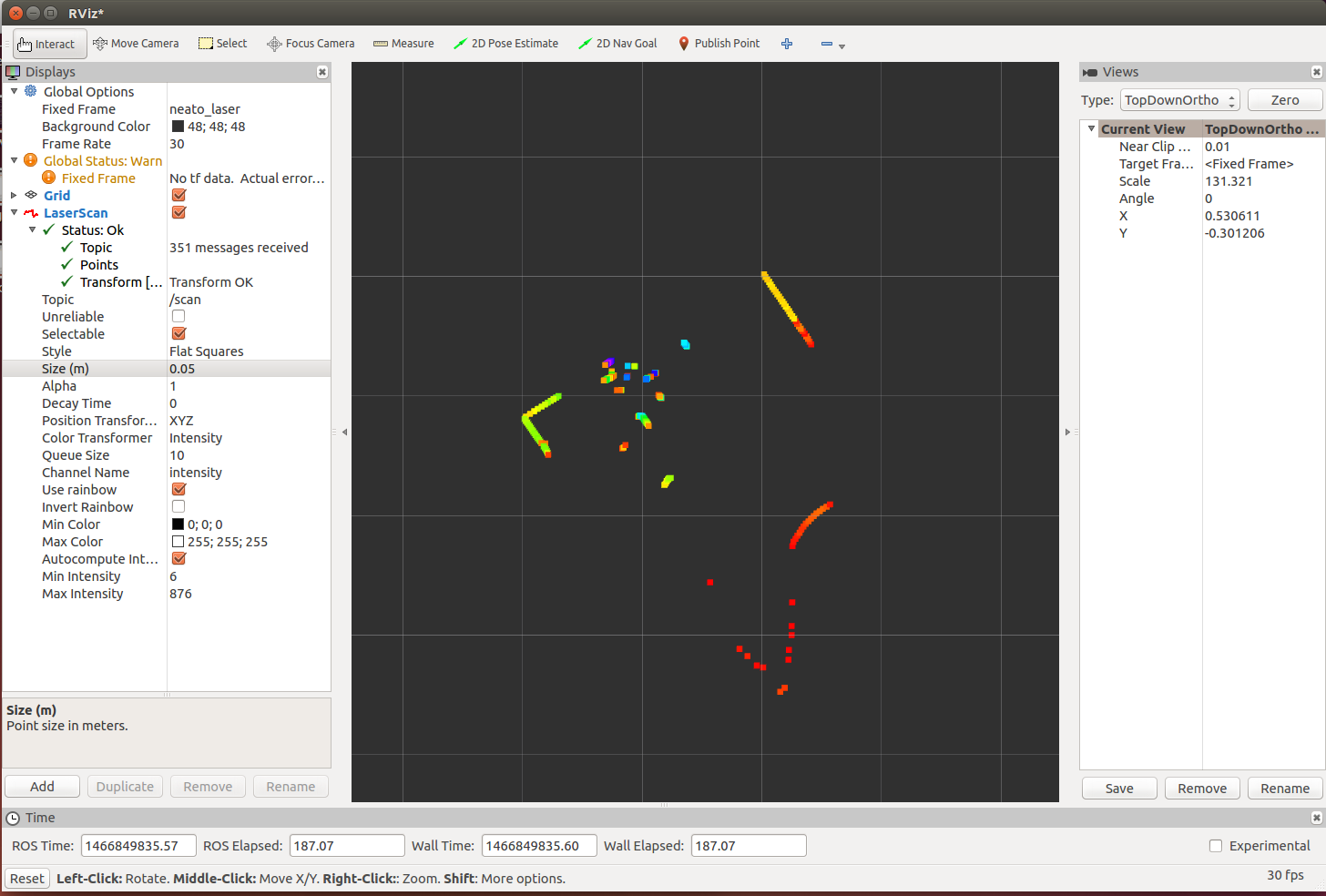
修改完后通过roslaunch neato_node bringup.launch实现neato的驱动
通过rostopic pub -r 10 /cmd_vel geometry_msgs/Twis '{linear: {x: 0.0, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}'可以测试neato xv-21运动能力。