数码相机传感器
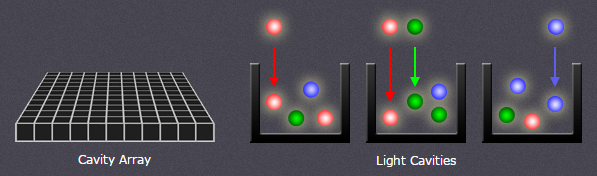
数码相机利用数以百万计的极小的感光单元阵列来记录照片。按下快门后,这些感光单元便开始收集和存储光子。一旦曝光结束,相机关闭所有感光单元,计算落入每个感光单元的光子数量。落入感光单元的的光子的相对数量随后被存储成不同的强度等级,精度有位深(bit depth)决定。
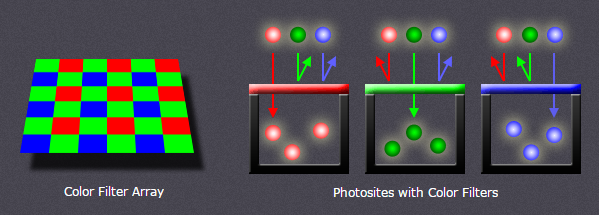
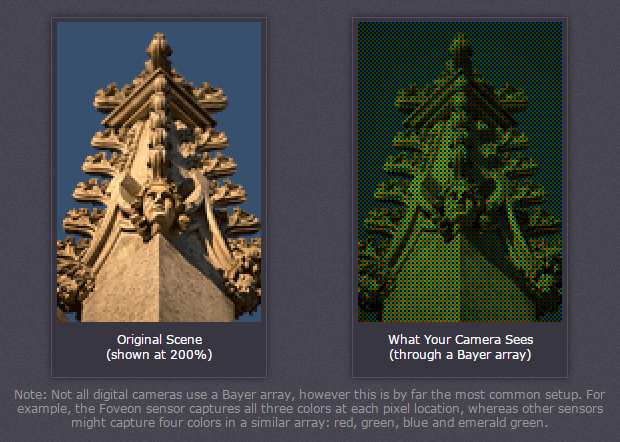
以上所描述的仅仅能创建灰度图,因为感光单元不能够区分每种每种颜色成分的多少。为了创建彩色图像,必须在每个感光单元上滤光镜,滤光镜仅允许一种颜色的光进入。事实上,现在数码相机的每个感光单元仅能捕获三种主要色光中的一种,所以2/3的入射光被丢弃了。因此,为了显示完整的图像,必须近似出每个位置其他两种色光。最常用的滤光镜阵列叫做”Bayer array”,如下图所示:
“Bayer array”由两种不同的排列组成,一种reg-green排列,一种green-blue排列。Bayer array中,green滤光镜的数量是red和blue滤光镜数量的两倍。因为人眼对每种色光的敏感程度不一样,对绿光的敏感程度更强,所以每种绿光滤光镜的数量最多。这样拍摄的照片噪声也最少。这也解释了为什么绿色通道的噪声相比其他两个通道较少。
BAYER DEMOSAICING
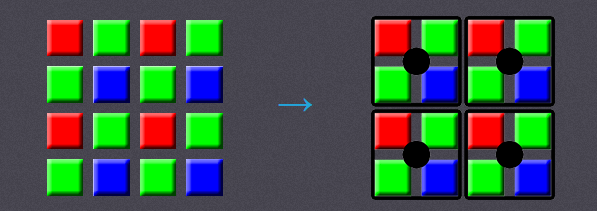
Bayer demosaicing 是将每个位置捕获到的单一色光补充完整,组成一张完整的图片。方法是将每个2x2的感光单元当做一个来处理,这样就可以组成完整的图像,但是图片的高度和宽度会缩短一半。
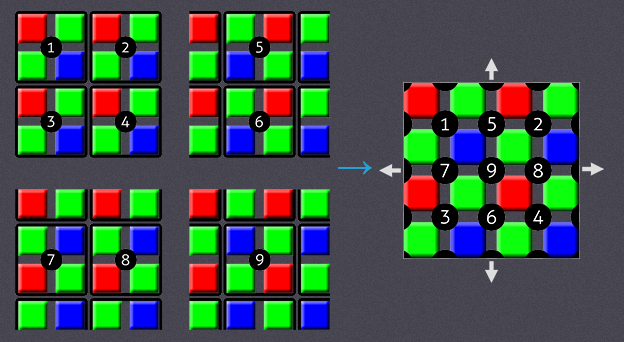
通常情况下,这样是可以工作的。但是,许多摄像机会使用一些其他方法,从捕获到的信息中提取更多的信息。如果我们将2x2的感光单元当做一个感光单元对待,那么得到的照片分辨率在水平和垂直方向上就都会减少一半。另一方面,如果我们使用相互覆盖的2x2的感光单元作为一个感官单元,这样得到的照片分辨率就不会缩小。下图展示了这种方法的示意图:
其他算法可以提取到更多的信息,得到分辨率更大的照片。
DEMOSAICING ARTIFACTS
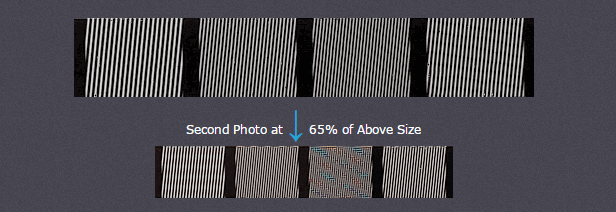
当照片的微小细节逼近摄像机的极限分辨率时,demosaicing算法就有可能被欺骗,产生一些噪声。最常见的噪声叫做moiré,通常以重复模式、颜色噪声或者迷宫一样的形式。如下所示:
以上这两张分辨率不同的照片,下面一组图片中,第三张图片中出现了颜色噪声,其他图片中都出现了重复的模式。即使每个位置的感光单元都可以捕获并且保存三种色光,moiré和其他认为噪声依然可能出现。当对连续的信号进行离散采样时,这种噪声是不可避免的。正是因为如此,每个感光单元会配合low-pass-filter和anti-aliasing-filter一起使用。这些filter通常就是感光单元前面的一层薄膜,这些filter可以平滑掉产生问题的细节,这些细节的分辨率高于相机的分辨率。
MICROLENS ARRAYS
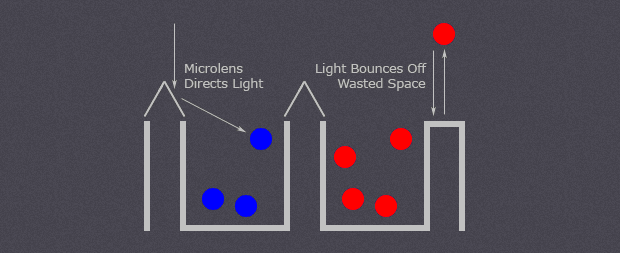
也许你已经发现了,在第一张图片中,感光单元彼此之间存在一定空隙,而非彼此之间紧挨着。事实上,感光单元并没有完全覆盖传感器的整个表面,只是覆盖了一般的面积,另一半面积摆放电子元件。两个感光单元之间以两个相互支撑的斜面连接(如下图), 这些斜面具有反光的作用,用来将光引导到感光单元中。相互支撑的斜面被称作”microlenses”,可以增强感光单元的收集能力。
设计良好的microlenses可以增强每个位置的光强,这样可以创建出噪声更小的照片。相机制造商可以通过设计良好的microlenses较少噪声,即使在感光单元较少的情况下也可以得到很好地效果。
REFERENCE
- [1]http://www.cambridgeincolour.com/tutorials/camera-sensors.htm