简介:
A*算法是一个种静态路网中求解最短路径最有效的直接搜索方法,是一种启发式搜索
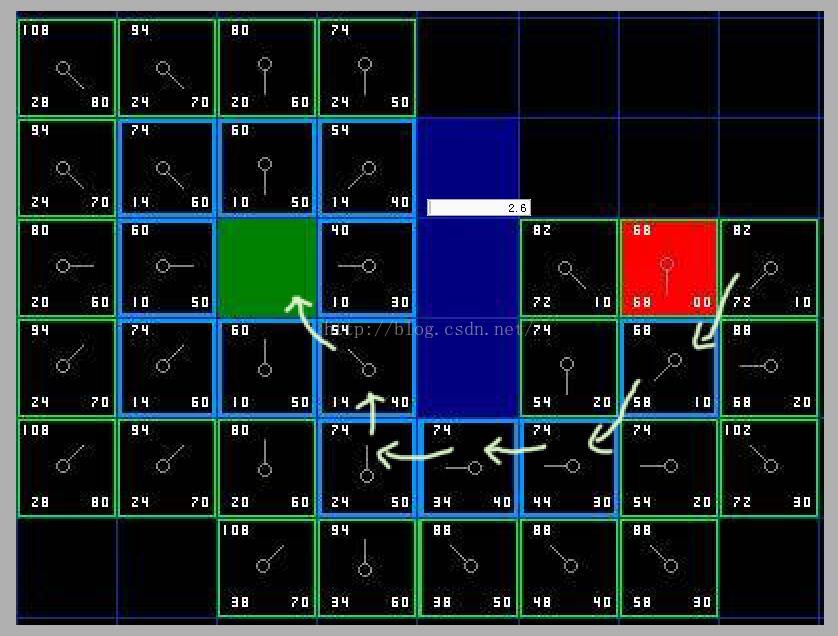
地图:

大致思路:
首先要有一个开启列表和一个关闭列表
开启列表中用来存放所有可能走的点(可以使用优先队列)
关闭列表中存放所有走过的点
1:先将起点加入开启列表中
2:在开启列表中找到F值最低的点(F值的计算下面讲)
3:将该点加入到关闭列表中,并从开始列表中移除
4:遍历该点的周围8格
{
如果不能走,或者在关闭列表中,则continue
否则判断是否在开启列表中,如果在就继续比较该点当前的G值和原来的G值,并更新状态,更新该点的父节点
如果不在开启列表,则计算GHF值,设置父节点
判断是否找到最终点,如果找到退出循环,否则重复循环
}
5:当开启列表不为空,或者没有找到最终点时,一直循环234,当开启列表为空时,则表示没有找到点
GHF值的计算:
f(n):从起点到终点的估计代价值,f(n)=g(n)+h(n)
g(n):从起点到节点的实际代价值,g(n)=当前代价值+父节点的g值,方便计算,将距离都*10,直边:10,斜边:14
h(n):从节点到达终点的估计代价值,一般用2种计算方式,欧几里和曼哈顿
欧几里:斜边长度(2点间距离公式)
曼哈顿:x的距离差+y的距离差
代码:
void AStar::Astar()
{ Point begin; begin.x = hero.x; begin.y = hero.y; begin.f = begin.g = begin.h = 0; begin.next = nullptr; OpenList.push_back(begin); //将起始点放入关闭列表中 while (!OpenList.empty()) { OpenList.sort(AStar()); //将开启列表按f值从小到大排序 CloseList.push_back(OpenList.front()); //将开启列表的f值最小的点,加入关闭列表中 OpenList.pop_front(); //将该点从开启列表中删除 for (int i = 0; i < 8; i++) { Point Temp; Temp.x = CloseList.back().x + nextX[i]; Temp.y = CloseList.back().y + nextY[i]; if (map[Temp.x][Temp.y] == 1 || true == Find(Temp.x, Temp.y)) //该点不为墙,或者该点不在关闭列表中 continue; if (false == Judge(i)) //判断该点能不能走 continue; Temp.g = CloseList.back().g + (int)sqrt(abs(nextX[i]) + abs(nextY[i])) * 10; //计算点的g值 Temp.h = (abs(target.x - Temp.x) + abs(target.y - Temp.y)) * 10; //计算点的h值 Temp.f = Temp.g + Temp.h; //计算点的f值 Temp.next = &CloseList.back(); //设置父节点 if (false == FindOpen(Temp)) { OpenList.push_back(Temp); //将该点加入开启列表中 } if (true == Find(target.x, target.y)) //找到目标点,结束函数 { return; } } }
}

![常见算法合集[java源码+持续更新中...]](/images/no-images.jpg)


