这篇博文是在其他博客基础上加工的,主要原因是感觉原博客举得例子不太好,很多细节感觉没有描述。
A*算法主要是在父节点更新那个地方很容易误解,但是父节点的更新又是A*算法的核心,因为遍历到目标节点之后就是根据父节点回溯返回找到的路径的。
开始:
一只探路猫
让我们想象一下,有一款游戏,游戏中一只猫想要找到获取骨头的路线。
“为什么会有一只猫想要骨头?!”你可能会这么想。在本游戏中,这是一只狡猾的猫,他想捡起骨头给狗,以防止被咬死!:]
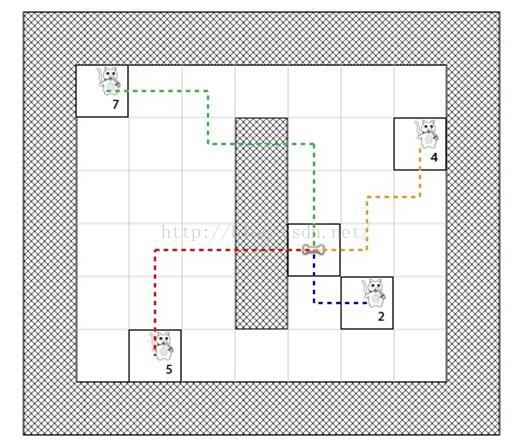
现在想像一下下图中的猫想找到到达骨头的最短路径:
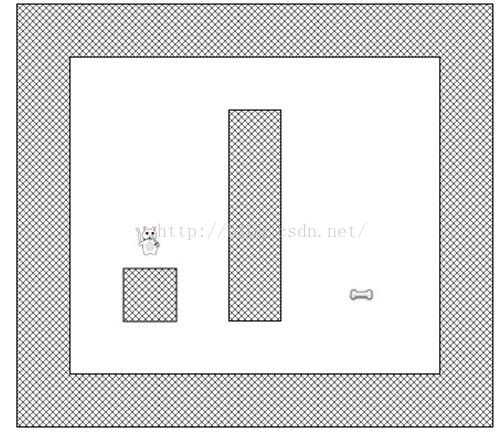
不幸的是,猫不能直接从它当前的位置走到骨头的位置,因为有面墙挡住了去路,而且它在游戏中不是一只幽灵猫!
游戏中的猫同样懒惰,它总是想找到最短路径,这样当他回家看望它的女朋友时不会太累:-)
但是我们如何编写一个算法计算出猫要选择的那条路径呢?A星算法拯救了我们!
简化搜索区域
寻路的第一步是简化成容易控制的搜索区域。
怎么处理要根据游戏来决定了。例如,我们可以将搜索区域划分成像素点,但是这样的划分粒度对于我们这款基于方块的游戏来说太高了(没必要)。
作为代替,我们使用方块(一个正方形)作为寻路算法的单元。其他的形状类型也是可能的(比如三角形或者六边形),但是正方形是最简单并且最适合我们需求的。
像那样去划分,我们的搜索区域可以简单的用一个地图大小的二维数组去表示。所以如果是25*25方块大小的地图,我们的搜索区域将会是一个有625个正方形的数组。如果我们把地图划分成像素点,搜索区域就是一个有640,000个正方形的数组了(一个方块是32*32像素)!
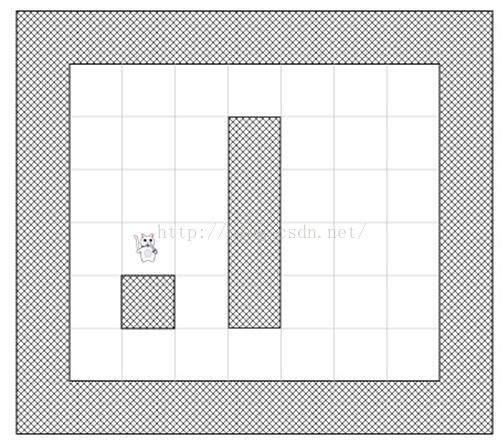
现在让我们基于目前的区域,把区域划分成多个方块来代表搜索空间(在这个简单的例子中,7*6个方块 = 42个方块):
Open和Closed列表
既然我们创建了一个简单的搜索区域,我们来讨论下A星算法的工作原理吧。
除了懒惰之外,我们的猫没有好的记忆力,所以它需要两个列表:
- 一个记录下所有被考虑来寻找最短路径的方块(称为open 列表)
- 一个记录下不会再被考虑的方块(成为closed列表)
猫首先在closed列表中添加当前位置(我们把这个开始点称为点 “A”)。然后,把所有与它当前位置相邻的可通行小方块添加到open列表中。
下图是猫在某一位置时的情景(绿色代表open列表):
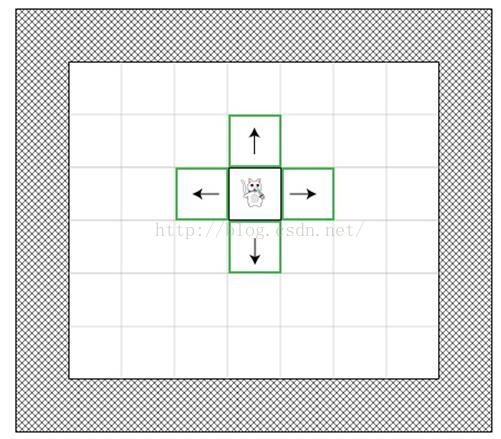
现在猫需要判断在这些选项中,哪项才是最短路径,但是它要如何去选择呢?
在A星寻路算法中,通过给每一个方块一个和值,该值被称为路径增量。让我们看下它的工作原理!
路径增量
我们将会给每个方块一个G+H和值:
· G是从开始点A到当前方块的移动量。所以从开始点A到相邻小方块的移动量为1,该值会随着离开始点越来越远而增大。
· H是从当前方块到目标点(我们把它称为点B,代表骨头!)的移动量估算值。这个常被称为探视,因为我们不确定移动量是多少 – 仅仅是一个估算值。
你也许会对“移动量”感兴趣。在游戏中,这个概念很简单 –仅仅是方块的数量。
然而,在游戏中你可以对这个值做调整。例如:
· 如果你允许对角线移动,你可以针对对角线移动把移动量调得大一点。
· 如果你有不同的地形,你可以将相应的移动量调整得大一点 –例如针对一块沼泽,水,或者猫女海报:-)
这就是大概的意思 –现在让我们详细分析下如何计算出G和H值。
关于G值
G是从开始点A到达当前方块的移动量(在本游戏中是指方块的数目)。
为了计算出G的值,我们需要从它的前继(上一个方块)获取,然后加1。所以,每个方块的G值代表了从点A到该方块所形成路径的总移动量。
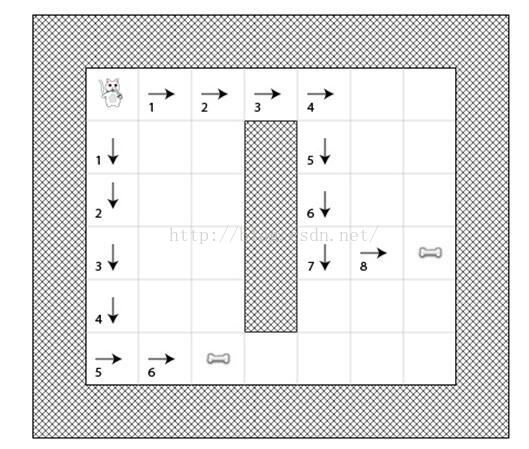
例如,下图展示了两条到达不同骨头的路径,每个方块都标有它的G值:
关于H值
H值是从当前方块到终点的移动量估算值(在本游戏中是指方块的数目)。
移动量估算值离真实值越接近,最终的路径会更加精确。如果估算值停止作用,很可能生成出来的路径不会是最短的(但是它可能是接近的)。这个题目相对复杂,所以我们不会再本教程中讲解,但是我在教程的末尾提供了一个网络链接,对它做了很好的解释。
为了让它更简单,我们将使用“曼哈顿距离方法”(也叫“曼哈顿长”或者“城市街区距离”),它只是计算出距离点B,剩下的水平和垂直的方块数量,略去了障碍物或者不同陆地类型的数量。
例如,下图展示了使用“城市街区距离”,从不同的开始点到终点,去估算H的值(黑色字):
A星算法
既然你知道如何计算每个方块的和值(我们将它称为F,等于G+H), 我们来看下A星算法的原理。
猫会重复以下步骤来找到最短路径:
- 将方块添加到open列表中,该列表有最小的和值。且将这个方块称为S吧。
- 将S从open列表移除,然后添加S到closed列表中。
- 对于与S相邻的每一块可通行的方块T:
· 如果T在closed列表中:不管它。
· 如果T不在open列表中:添加它然后计算出它的和值。
· 如果T已经在open列表中:当我们使用当前生成的路径到达那里时,检查F和值是否更小。如果是,更新它的和值和它的前继。
如果你对它的工作原理还有点疑惑,不用担心 –我们会用例子一步步介绍它的原理!:]
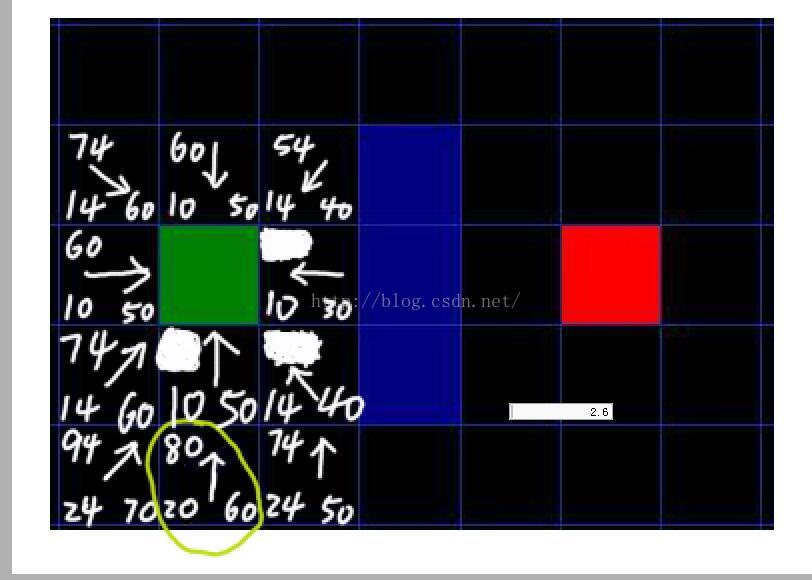
如下图方格中左下角:G,方格右下角:H,左上角:F
F=G+H (其实这个公式不用理解也行,主要是为了方便计算的)
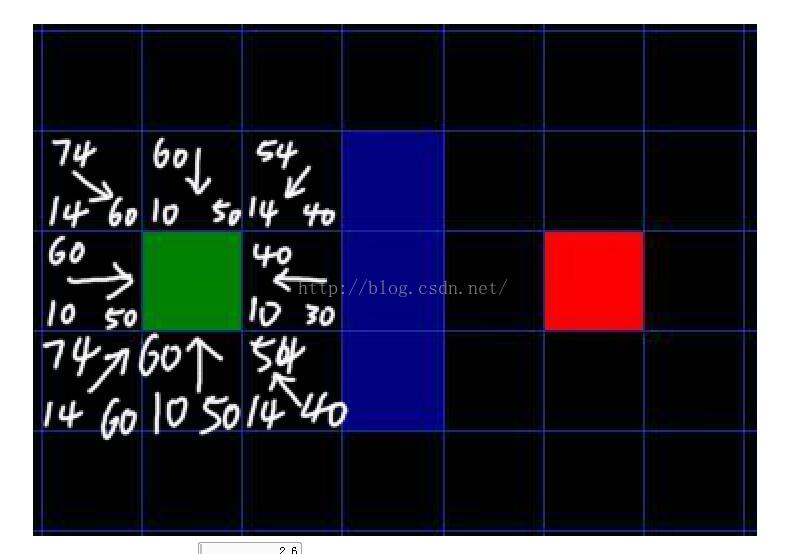
上图是第一步:计算起点周围邻域的代价,跨越一条边是10,对角是14,
把周围节点的G和H计算出来之后,计算F(就是G+H)。然后再赋予父节点,其实可以想象初始的时候所有节点的F都是无穷大的,为什么要这么理解呢,主要是节点的父指针就是根据F来变化的。
因为一开始都是无穷大,所以邻域节点的F计算出来之后都要比无穷大小,那么,这些节点的父指针就指向当前的起始节点。如上图所示。因为此时这几个邻域节点都没有在open列表中,于是就把这8个点加到open队列中,并且把当前节点也就是起始节点放到close中(也就是下次不再考虑了)。
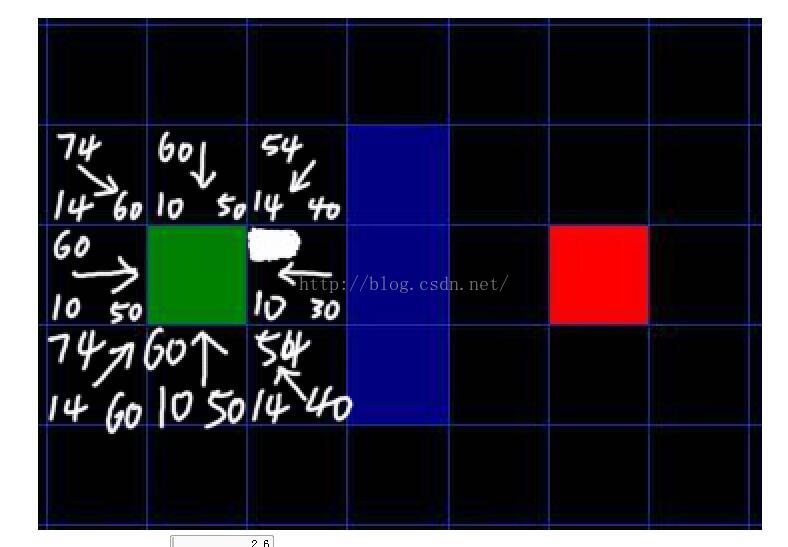
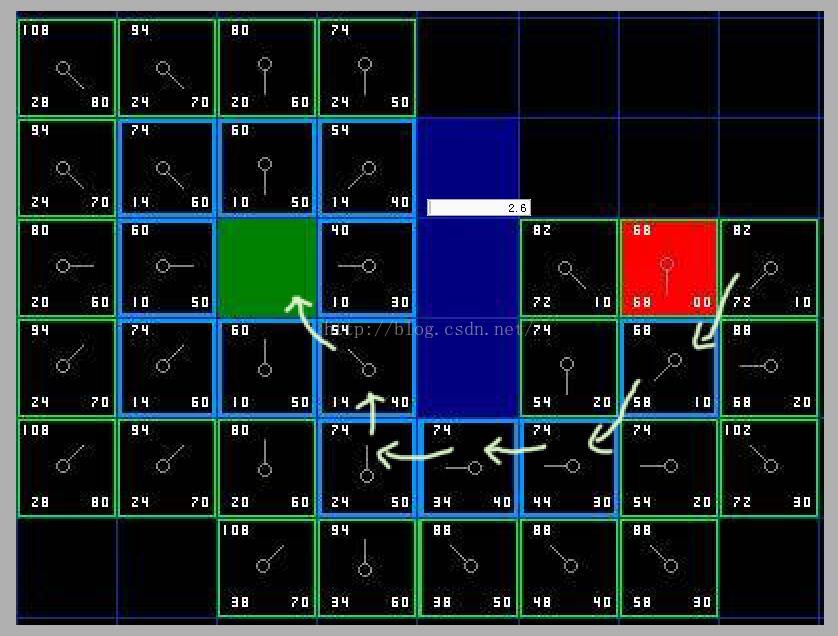
第二步:从open队列中选择F最小的那个节点,此时可能有F相同的(这种情况就随便选个,不影响最短路径长度),我们选择40的那个,于是,把F=40的这个节点作为当前节点,如下图所示:(此时我们把40抹去了,因为之后会把这个节点放到close队列中,close队列中的点都是不考虑的,也是为了描述方便,我们要的只是指针方向)
关键:
第三步:把40的那个节点周围8邻域的节点计算完F后,放到open队列中,注意,此时障碍物的节点和已经放入close队列的节点不放,那么此时没有新节点加入进来,由于把涂抹了的那个节点当成当前节点,所以需要重新计算它的8邻域节点的G值和F值,(也就是它的上方那个,坐上方节点,下方节点,左下方节点,一个4个),此时G值的计算是这样的:比如计算上方那个(54 14 40),由于从原点到当前节点的G为10,从当前节点到上方节点的G值为10,所以10+10=20(也就是所到上方节点需要先从原点到这个点,然后在从这个点到上面那个点),但是新计算的G=20<14(节点原来的G值),所以上方节点的指针方向不变,(如果计算出来小于原来的值,那么就把上方节点的指针指向当前这个节点了)!!
同样计算剩下的三个节点的G值,发现都大于原来的G值,所以节点指针方向没有做任何改变。
于是把当前节点放到close对列中,再从open队列中找F值最小的节点。(此时队列中有7个节点)
于是把54那个节点(起始节点的右下方那个)当成当前节点,计算周围8邻域的G值和F值。但是障碍物下方的那个点不能加入计算,因为从当前节点到障碍物下方那个节点必须穿透墙角了!
同样赋予节点父指针以及更新8邻域的G值和F值。
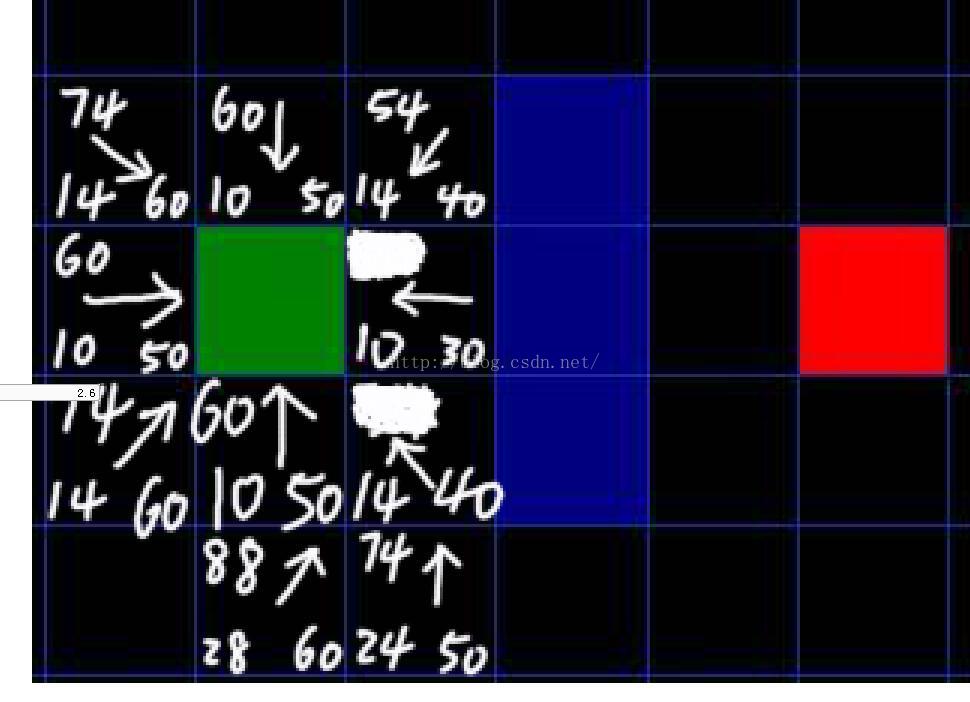
当把起始节点下方的那个节点当成当前节点的时候,注意它下方那个节点的父指针变化了,因为它原来的G值为28,但是通过当前节点的时候G能变小到20,所以对应的F也小了,那么,它的父指针就指向当前节点,表示这样走更近。
所以如此循环下去:不断从open队列中找最小的点作为当前节点并加入周围节点,不断更新周围8邻域的G和F,看看能不能比原来G值更小,如果小就更新,否则不更新,当前节点算完就放入close队列,然后再从open队列中找最小的点。。。。
最后直到把终点加入open队列中,计算出父指针就完事了。
所以最后的路径就是,从终点开始沿着父指针不断回缩,最后回到起始点,这样最短路径就找到了。
![常见算法合集[java源码+持续更新中...]](/images/no-images.jpg)


