前言
最近西门子PLC价格大幅上调,在工控界引起了不小的风波,不仅涨价,甚至还缺货,导致很多人不得不更改方案。听说最近已经完成了芯片替换,希望不久能够恢复供货,并把价格回调。
通过这件事,从侧面可以看出,西门子在工控领域的市场占有率很大,那么对于上位机开发人员来说,使用西门子PLC作为下位机,我们应该如何与之进行通信呢?
西门子PLC支持很多种通信协议,主要分为两种,一种是串口通信,一种是以太网通信,同时也可以通过OPC实现数据通信。
串口通信
西门子PLC支持串口通信,在S7-200和S7-200Smart中,都直接集成了串口,但是从S7-1200到S7-1500,慢慢都取消掉了,如果需要,可以通过扩展模块的方式来增加,出现这种现象的原因,其实也是工业发展的必然结果。串口通信的优势在于简单、成本低,但是劣势也非常明显,就是传输效率低。西门子早期的串口通信主要是Profibus DP通信,但是上位机是无法直接与西门子PLC走Profibus DP通信的,因此,西门子PLC常用的串口通信方案如下所示:
PPI通信:PPI通信只针对S7-200和S7-200 Smart系列PLC,其他型号不支持。
ModbusRTU主站:西门子PLC对Modbus协议支持还是比较不错的,这里是指PLC做Slave(即从站),上位机做Master(即主站)。
ModbusRTU从站:这里是指PLC做Master(即主站),上位机做Slave(即从站)。
以太网通信
西门子PLC通信还是以太网通信为主,我们常说的西门子通信协议分别是S7协议和Profinet协议,但是Profinet是一种总线协议,目前,C#是无法直接与西门子PLC走Profinet通信的。因此,西门子PLC常用的以太网通信方案如下所示:
S7通信:基本上从S7-200到S7-1500均可以实现,这里有很多可以选择的开源或商业库,包括http://s7.net、pronodave、libnodave、sharp7,也可以自己封装通信库。
ModbusTCP Server:这里是指PLC做Server(即服务器),上位机做Client(即客户端)。
ModbusTCP Client:这里是指PLC做Client(即客户端),上位机做Server(即服务器)。
OpenProtocol Server:这里是指开放式TCP通信,PLC做TCPServer(即服务器),上位机做TCPClient(即客户端)。
OpenProtocol Client:这里是指PLC做TCPClient(即客户端),上位机做TCPServer(即服务器)。
OPC通信
OPC通信是工业控制中常用的一种通信方式,主要在于OPC软件的选择以及OPCDA、OPCUA的选择,因此,西门子PLC常用的OPC通信方案如下所示:
PC Access系列:西门子针对S7-200开发PC-Access软件,针对S7-200 Smart又提供了PC-Access Smart软件,可以直接通过这些软件实现OPCDA通信。
Simatic Net 系列OPCDA:Simatic Net是西门子主推的OPC软件,支持西门子全系列,这里主要是OPCDA通信方式。
Simatic Net 系列OPCUA:新版的Simatic Net也开始支持OPCUA,这里主要是OPCUA通信方式。
KepServer 系列OPCDA:KepServer同样作为一款商业OPC软件,在国内使用率非常高,同样也支持西门子全系列,这里主要是OPCDA通信方式。
Simatic Net 系列OPCUA:新版的KepServer也开始支持OPCUA,这里主要是OPCUA通信方式。
S7 通信协议
在以上众多的通信方式和通信协议中,就目前而言,使用S7通信是最方便,也是应该最广泛的,那么S7协议相对于其他协议来说,有哪些优势呢?
使用S7通信协议最大的优势在于不需要编写PLC程序,而且S7协议在底层做了很强的封装,在上位机通信应用中相比其他通信协议来说,也有很大的优势。
虽然不需要编写PLC程序,但仍然需要做一些简单的配置:
开启Put/Get
PLC侧需要设置勾选允许来自远程对象的Put/Get通信访问 对于西门子1200/1500系列,必须要勾选允许Put/Get访问,对于200Smart/300/400,则不需要。
DB块去除优化访问
对于基于博图开发S7-1200/1500的项目,如果要与DB块数据通信,需要要去除DB的优化的块访问,对于200Smart/300/400,则不需要。如果希望通过标签通信,可以采用OPCUA。
务必保证通信地址是有效地址
因为PLC大多数是基于存储区的,每个地址肯定是隶属于某个存储区,大家都知道西门子PLC自带的存储区有I区、Q区、M区、T区、C区,但是对于常用的DB存储区是没有的,需要自己去创建,也就意味着,如果你要读取DB地址,必须要提前创建好DB存储区,除此以外,DB存储区创建之后,默认是没有字节的,需要自己一个个添加变量,才能形成有效存储区,因此一个DB存储区的范围是有限并且可见的(可以通过偏移量看出来)。
S7协议之布尔操作
对于布尔操作,很多协议都有,但是这里的布尔操作是指寄存器布尔,比如DB100.DBX0.0,很多时候,我们都是通过先读取DB100.DBB0的值,再通过位运算结果,写入到DB100.DBB0中,实现DB100.DBX0.0的操作,但是这种方式有弊端
第一:每次操作一个布尔值都需要与PLC进行两次数据交互。
第二:安全性和稳定性无法保障,你不知道在你读取和写入之间,这个字节的值是否已经发生了改变。
这样的问题也存在于Modbus协议的寄存器位操作,如40001.05,三菱、欧姆龙的寄存器位操作,如D100.06、W12.04,给上位机开发者带来很多苦恼。
但是S7协议支持直接位操作,有专门的报文指令实现这样的功能。
S7 协议之PDU读取
大部分人都知道S7协议一次性读取有限制,但是具体是多少?怎么计算出来的?
S7协议的一次性读取长度是根据PDU计算出来的,这个PDU的值是来自于PLC本身,不同型号的CPU,它的PDU是不一样的,可以参考下面两张图:
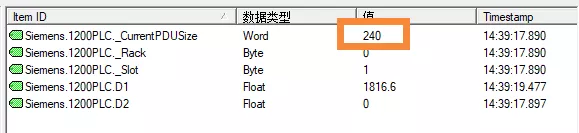
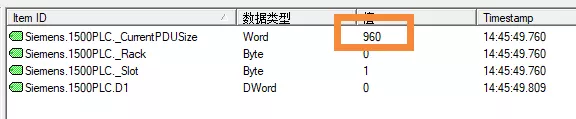
西门子PLC的PDU大小是和CPU息息相关的,一般会有240、480、960三个档次,知道PDU之后,那么一次性读取的字节长度,就是在PDU的基础上减去18,这个18是指包头包尾会有18个字节,这样我们就知道了一般的PLC,一次性能读取222个字节(240-18=222),但是对于S7-1516这样的PLC,我们一次性是可以读取942个字节的(960-18=942),这个一次性能读取的字节越长,越能提高上位机的通信效率。
刚刚的方式是通过KepServer测试的,实际开发过程中,该怎么获取CPU的PDU呢,实际上在建立连接的第二次握手时,返回的报文中就包含PDU的值。
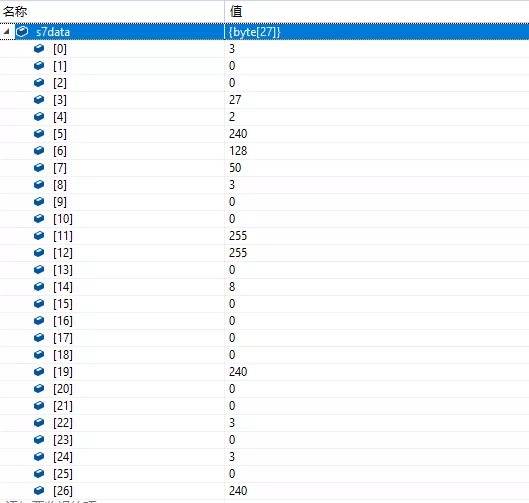
第二次握手返回的报文长度是27个字节,最后两个字节就是PDU的值,上图展示的是S7-1200PLC返回的报文,0和240的组合即为240。
对于S7-1500,我这里也做了一下测试,结果如下,返回结果为3和192,3和192的组合恰好是960(960=3*256+192)。

虽然PDU是由硬件做了限制,但是我们可以通过软件的方式,实现大量数据的读取,只需要在底层做一些封装即可。做了一下测试,针对S7-1200和S7-1500同时读取M区的8000个字节的耗时比较,S7-1200耗时800多ms,S7-1500耗时仅需200ms,由此可见,硬件对通信的重要性。


S7 协议之多组读取
对于很多其他的通信协议,当我们遇到数据变量比较零散,同时读取多个存储区或者一个存储区多个不同部分的时候,我们只能针对每个存储区或者每块区域做一个数据请求,但是西门子S7协议可以解决这样的问题。
西门子S7协议有一个非常强大的一个地方,可以同时读取很多个不同的存储区,最大支持19种,总共读取长度仍然受PDU的限制。
这里我们仍然以实验测试为例,体验多组读取带来的美妙体验。
假设我们的通信组配置如下:
通信组01:读取I区从0开始的1个字节
通信组02:读取Q区从0开始的1个字节
通信组03:读取M区从0开始的200个字节
通信组04:读取M区从500开始的50个字节
通信组05:读取M区从1000开始的60个字节
通信组06:读取DB100从0开始的20个字节
通信组07:读取DB100从20开始的20个字节
通信组08:读取DB100从40开始的20个字节
通信组09:读取DB100从60开始的20个字节
我们采用常用S7-1200PLC,通过配置软件实现配置以上9个通信组,开始通信测试,首先我们选择的是单组读取的方式,就是针对每个组,依次进行读取,结果如下,耗时大约200ms,这个时间应该相对来说还是比较正常的。

接着,将读取方式改成了多组读取,再进行测试发现结果如下:

通过结果发现,多组读取对于存储区较为零散的项目来说,有着非常重要的作用,可以大大提高通信效率。
总结
通过上面一系列的分享,相信大家对西门子PLC通信有了更加深入的了解,希望大家可以多多实践。
每种通信方式都有自己的优缺点,对各种通信方式和协议了解之后,你才能够在不同的场合选择适合的通信方式,给出最合理的解决方案。