多旋翼无人机振动分析与减振方法
- 振动分析
- 无人机减振设计
- 机械减振
- 数字滤波减振
振动分析
振动机制包括:
- 激励(振动源)
- 系统
- 响应
无人机振动机制:
- 激励 —— 动力系统(旋翼+电机)
- 系统 —— 机架
- 响应 —— 传感器(惯导)
无人机振动来源:
- 动不平衡,振动频率等于旋转频率
- 单个旋翼产生的周期性气动力(升力波),引起的振动二次谐波
- 多个旋翼流场相互耦合产生的二次以上的谐波
振动影响方向:
- 动不平衡 —— 水平方向
- 气动力 —— 垂直方向
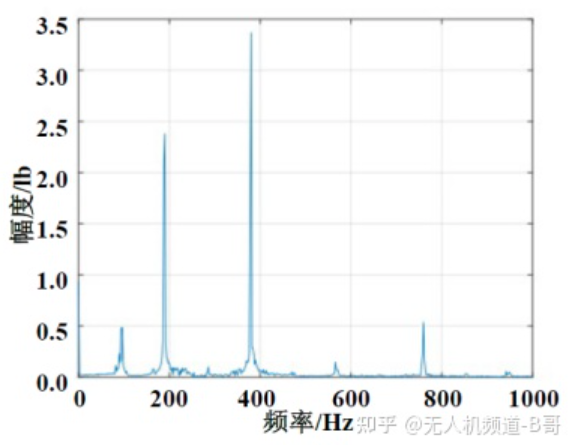
上图电机旋转频率为95Hz,可以看出振动信号的基频为电机旋转频率,另外存在2、4、8次谐波分量
振动对无人机的危害:
对于多旋翼飞行器而言,振动最大的危害是使惯性测量单元的测量失真,进而导致状态估计误差增大,影响控制性能,严重可使控制发散。
机架振动分析结论:
- 机臂中间段形变大于外段和内段,机臂中间段平均振幅最强
- 机架中部,形变最小,布置飞行控制器所需惯性测量单元的理想位置
无人机减振设计
减振的目标是降低高频和中频振动,同时仍然允许低频来反应实际运动与机身同步进行。
减振的手段大体可以分为两种:
- 机械减振
- 数值滤波减振
机械减振
机械减振可以作为一种有效的噪声消除手段。它通过阻挡无效信号进入传感器,从源头上滤去噪音,很多时候能实现数字滤波达不到的效果。从减振降噪的角度看,阻尼是指耗损振动的能量的能力,将振动的机械能转化为内能或其他形式的能量,从而达到减振的目的。
机械减振有几种方法
1、3M泡沫

3M 泡沫两面都有粘性,预先切割好,分别贴在飞控的四个角上
2、凝胶垫
将凝胶切成 1 厘米 ~ 2 厘米的方块,并贴在飞控的每个角落。
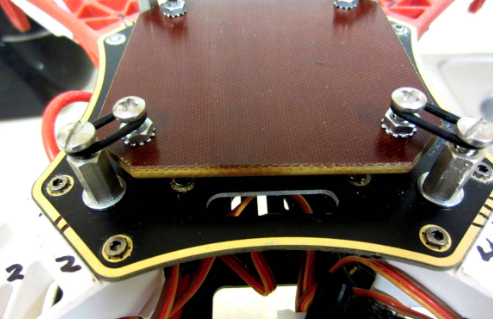
3、防震平台


安装时可使用双面胶,或间隔 45mm x 45mm 的 M3 螺丝
5、O型圈悬架安装
数字滤波减振
尽管机械减振的效果显著,但它需要在机械设计和材料选择上进行大量的改动和尝试,这在很多情况下并不方便。相比之下,数字滤波减振就显得更为简单和高效。它通过软件算法,将不必要的高频信号滤除。
可以通过频谱分析,使用一阶低通滤波或者带阻滤波,来滤除不必要的高频信号。
常用的一阶低通滤波器如下:

![[架构之路-16]:目标系统 - 硬件平台 - CPU主要物理性能指标](https://img-blog.csdnimg.cn/img_convert/6284de0c6f05958932cd581f9a770127.png)


