目录
- 前言
- 一、蓝牙
- 1.1 蓝牙模块简介
- 1.2 蓝牙常用AT指令集
- 1.3 示例代码
- 二、通信模块
- 2.1 模块简介
- 2.2 AT指令简介
- 2.2.1 常用AT指令
- 2.2.2 拨打/接听电话
- 2.2.3 短信的读取与发送
- 2.3.4 GPRS 通信
- 2.3 TCP通信示例代码
- 三、GPS模块
- 3.1 GPS模块简介
- 3.2 GPS常用通信协议
- 3.2.1 NMEA-0183协议
- 3.2.2 UBX协议
- 3.3 示例代码
前言
主要介绍蓝牙模块、GSM模块以及GPS模块通讯驱动的实现
一、蓝牙
1.1 蓝牙模块简介
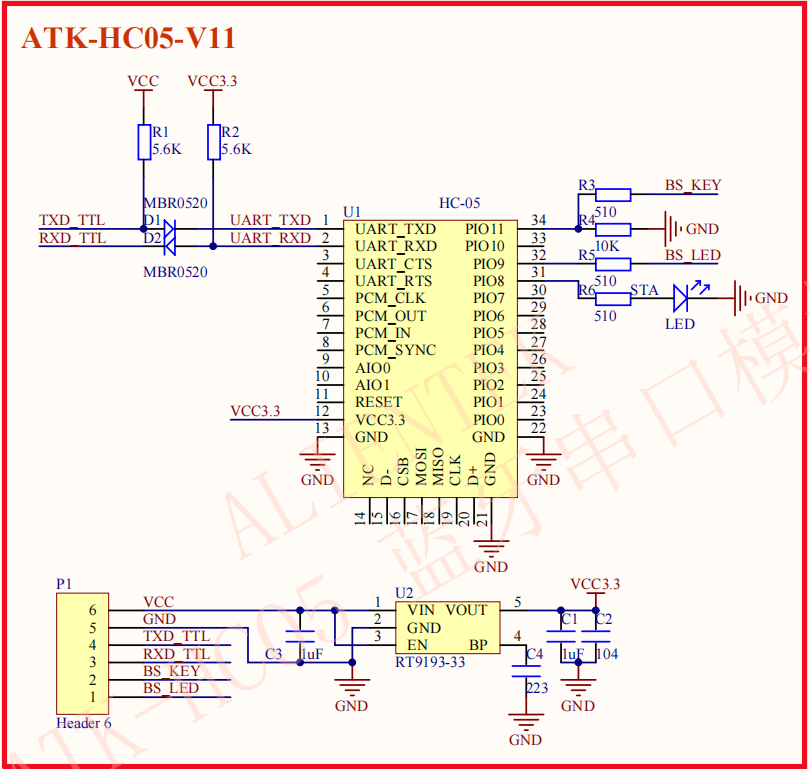
以HC05模块为例,实际上HC05是通过串口与单片机进行通讯的,HC05 蓝牙串口模块所有功能都是通过AT指令集控制,然后再通过串口将处理后的数据传给单片机。
HC-05 嵌入式蓝牙串口通讯模块(以下简称模块)具有两种工作模式:命令响应工作模式和自动连接工作模式,在自动连接工作模式下模块又可分为主(Master)、从(Slave)和回环(Loopback)三种工作角色。当模块处于自动连接工作模式时,将自动根据事先设定的方式连接的数据传输;当模块处于命令响应工作模式时能执行下述所有 AT 命令,用户可向模块发送各种 AT 指令,为模块设定控制参数或发布控制命令。通过控制模块外部引脚(PIO11)输入电平,可以实现模块工作状态的动态转换。
串口模块用到的引脚定义:
1、PIO8 连接 LED,指示模块工作状态,模块上电后闪烁,不同的状态闪烁间隔不同。
2、PIO9 连接LED,指示模块连接成功,蓝牙串口匹配连接成功后,LED 长亮。
3、PIO11 模块状态切换脚,高电平–>AT命令响应工作状态,低电平或悬空–>蓝牙常规工 作状态。
4、模块上已带有复位电路,重新上电即完成复位。
设置为主模块的步骤:
1、PIO11 置高。
2、上电,模块进入 AT 命令响应状态。
3、超级终端或其他串口工具,设置波特率 38400,数据位 8 位,停止位 1 位,无校验位,无流控制。
4、串口发送字符“AT+ROLE=1\r\n”,成功返回“OK\r\n”,其中\r\n 为回车换行。
5、PIO 置低,重新上电,模块为主模块,自动搜索从模块,建立连接。
1.2 蓝牙常用AT指令集
模块的指令结构为:AT+<=PARAM>,其中 CMD(指令)和 PARAM(参数)都是可选的,不过切记在发送末尾添加回车符(\r\n),否则模块不响应,比如我们要查看模块的版本:
串口发送:AT+VERSION?\r\n
模块回应:+VERSION:2.0-20100601
OK
注意:AT 指令不区分大小写,均以回车、换行字符结尾:\r\n
- 测试指令
| 指令 | 响应 | 参数 |
|---|---|---|
| AT | OK | 无 |
- 模块复位(重启)
| 指令 | 响应 | 参数 |
|---|---|---|
| AT+RESET | OK | 无 |
- 设置/查询—模块角色
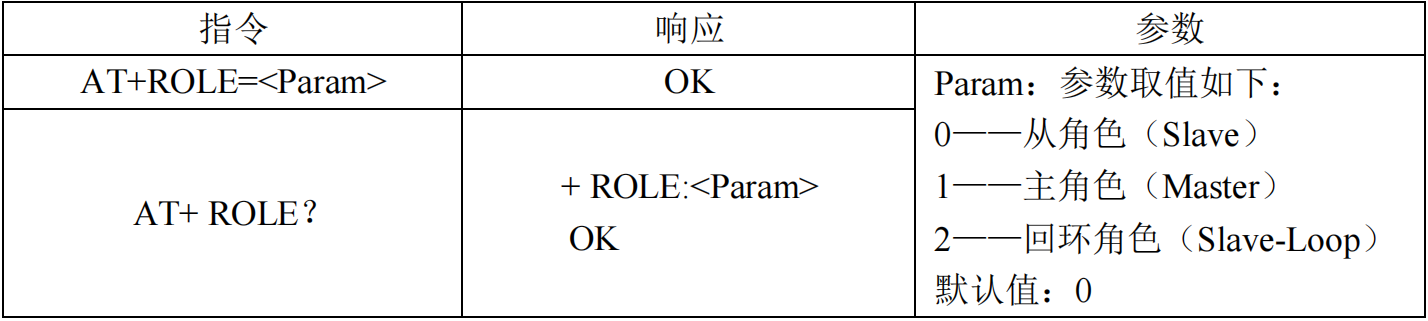
AT+ROLE=0 或 1,该指令来设置模块为从机或主机,并且可以通过 AT+ROLE?来查看模块的主从状态
模块角色说明:
Slave(从角色)——被动连接;
Slave-Loop(回环角色)——被动连接,接收远程蓝牙主设备数据并将数据原样返回给远程蓝牙主设备;
Master(主角色)——查询周围 SPP 蓝牙从设备,并主动发起连接,从而建立主、从蓝牙设备间的透明数据传输通道。
-
设置/查询—连接模式
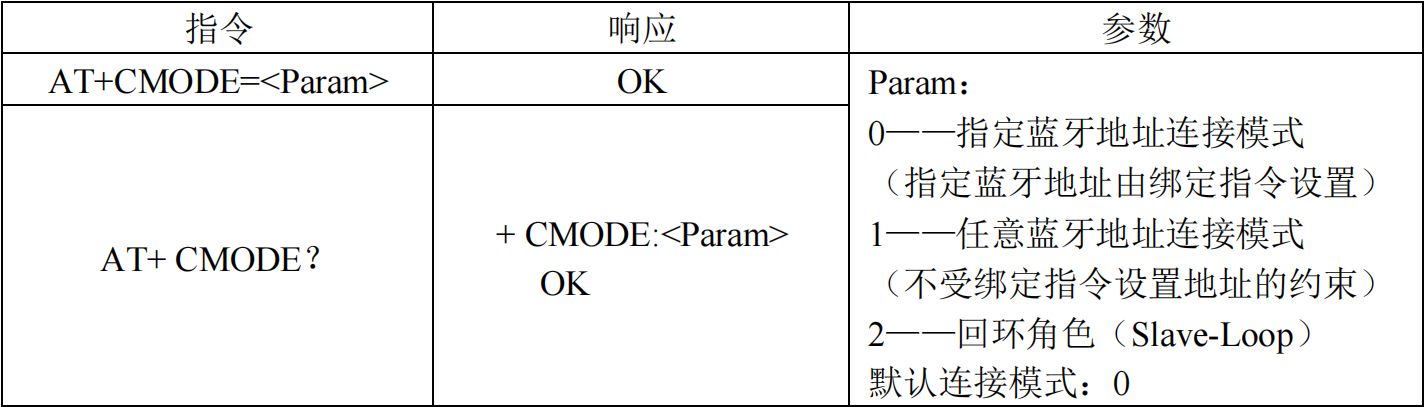
-
设置/查询—串口参数
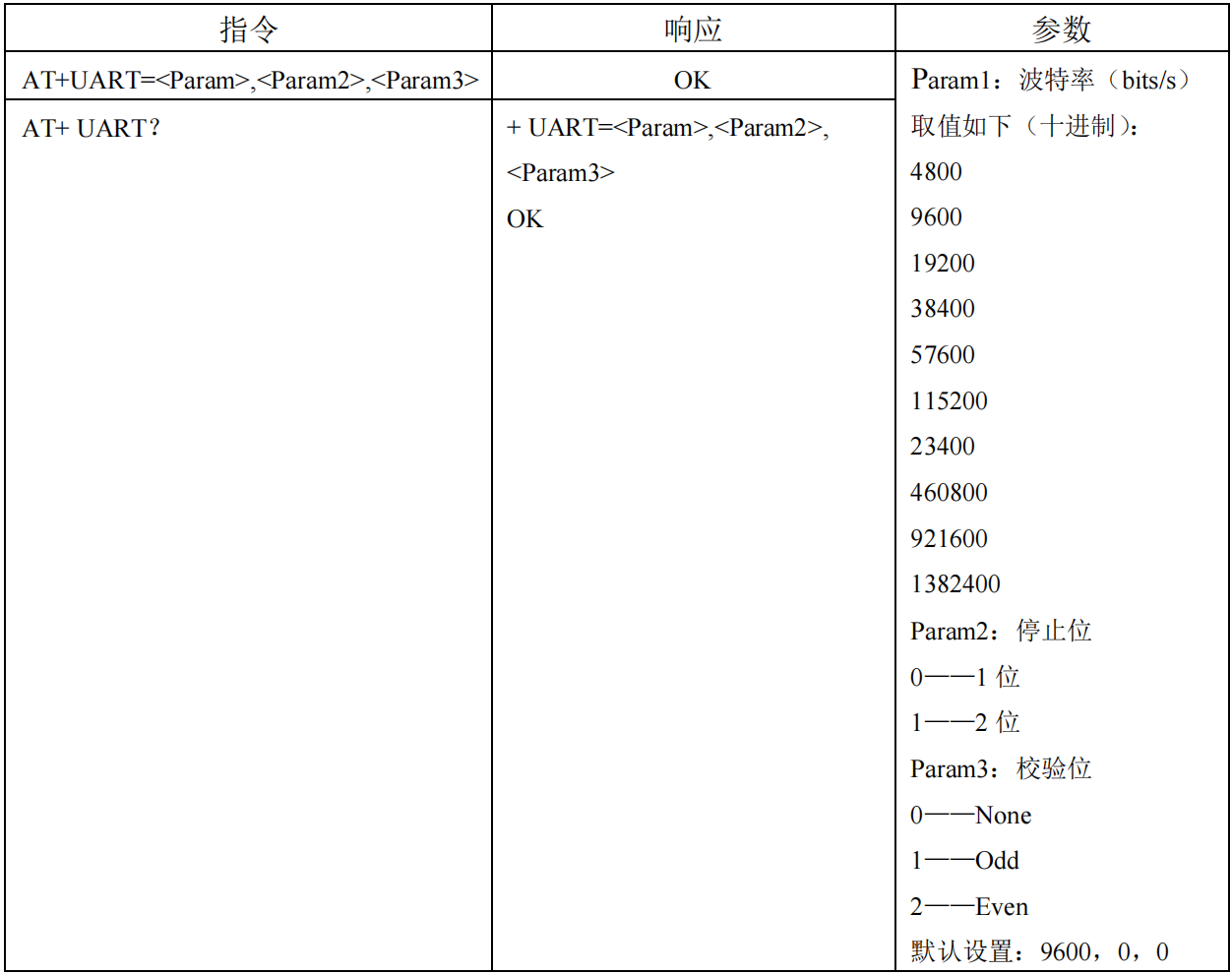
举例:AT+UART=9600,0,0,则是设置通信波特率为 9600,1 位停止位,没有校验位 -
设置/查询—配对码

该指令用于设置模块的配对密码,password 必须为 4 个字节长度 -
修改蓝牙模块名字

例如:AT+NAME=HC-05\r\n ——设置模块设备名为:“HC-05” -
初始化 SPP 规范库

-
查询蓝牙设备
| 指令 | 响应 | 参数 |
|---|---|---|
| AT+INQ | +INQ: < Param1>,< Param2>,< Param3>, OK | Param1:蓝牙地址;Param2:设备类;Param3:RSSI 信号强度 |
-
设置/查询—查询访问模式
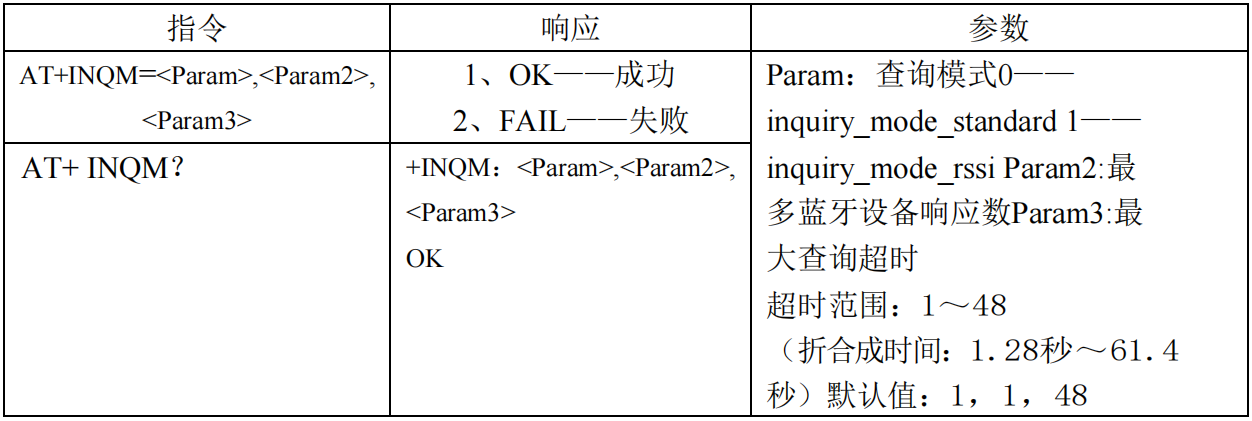
举例:AT+INQM=1,9,48\r\n——查询模式设置:带 RSSI 信号强度指示,超过 9 个蓝牙设备响应则终止查询,设定超时为 48xl. 28=61.44 秒 -
取消查询蓝牙设备
| 指令 | 响应 | 参数 |
|---|---|---|
| AT+INQC | OK | 无 |
- 设备配对

- 设备连接

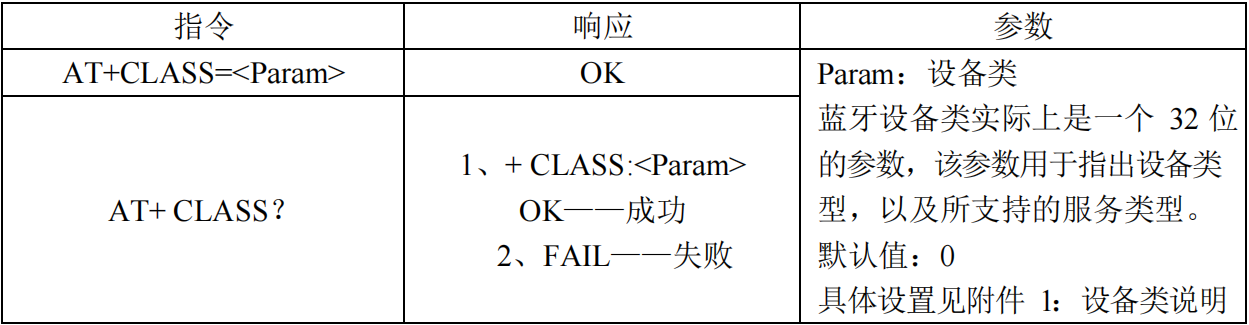
- 设置/查询—设备类
1.3 示例代码
- usart函数
因为蓝牙模块与单片机是通过串口通信的,所以要对串口进行配置,这里主要列举中断处理函数,以及发送函数
#include "usart3.h"
#include "stdio.h"
#include "string.h" #define USART3_MAX_RECV_LEN 400 //最大接收缓存字节数
#define USART3_MAX_SEND_LEN 400 //最大发送缓存字节数//串口发送缓存区
__align(8) u8 USART3_TX_BUF[USART3_MAX_SEND_LEN]; //发送缓冲,最大USART3_MAX_SEND_LEN字节//串口接收缓存区
u8 USART3_RX_BUF[USART3_MAX_RECV_LEN]; //接收缓冲,最大USART3_MAX_RECV_LEN个字节.u16 USART3_RX_STA=0;
void USART3_IRQHandler(void)
{if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET){res =USART_ReceiveData(USART3); if((USART3_RX_STA&(1<<15))==0)//接收完的一批数据,还没有被处理,则不再接收其他数据{ if(USART3_RX_STA<USART3_MAX_RECV_LEN) //还可以接收数据{USART3_RX_BUF[USART3_RX_STA++]=res; //记录接收到的值 }else {USART3_RX_STA|=1<<15; //强制标记接收完成USART_ClearITPendingBit(USART3, USART_IT_RXNE); } } }} //串口3,printf 函数
//确保一次发送数据不超过USART3_MAX_SEND_LEN字节
void u3_printf(char* fmt,...)
{ u16 i,j;va_list ap;va_start(ap,fmt);vsprintf((char*)USART3_TX_BUF,fmt,ap);va_end(ap);i=strlen((const char*)USART3_TX_BUF);//此次发送数据的长度for(j=0;j<i;j++)//循环发送数据{while(USART_GetFlagStatus(USART3,USART_FLAG_TC)==RESET); //等待上次传输完成 USART_SendData(USART3,(uint8_t)USART3_TX_BUF[j]); //发送数据到串口3 }
}void usart3_init(u32 bound)
{ NVIC_InitTypeDef NVIC_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;USART_DeInit(USART3); //复位串口3RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE); //使能GPIOB时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE);//使能USART3时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11 | GPIO_Pin_10; //GPIOB11和GPIOB10初始化GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHzGPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化GPIOB11,和GPIOB10GPIO_PinAFConfig(GPIOB,GPIO_PinSource11,GPIO_AF_USART3); //GPIOB11复用为USART3GPIO_PinAFConfig(GPIOB,GPIO_PinSource10,GPIO_AF_USART3); //GPIOB10复用为USART3 USART_InitStructure.USART_BaudRate = bound;//波特率一般设置为9600;USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART3, &USART_InitStructure); //初始化串口3USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//开启中断 USART_Cmd(USART3, ENABLE); //使能串口 NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2 ;//抢占优先级2NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
}//清理接收缓存
void clean_rebuff(void)
{uint16_t i=USART3_MAX_RECV_LEN+1;uart_p = 0;while(i)USART3_RX_BUF[--i]=0;
}
接收中断只是很常规的数据处理方式,当然也可以用定时器或者DMA实现。u3_printf函数里,我们使用vsprintf函数,这样可以避免重复使用sprintf字符串格式化函数
- HC05函数
#include "usart3.h"
#include "hc05.h"
#include "string.h"
#include "math.h"#define HC05_KEY PFout(6) //蓝牙控制KEY信号
#define HC05_LED PCin(0) //蓝牙连接状态信号//初始化ATK-HC05模块
//返回值:0,成功;1,失败.
u8 HC05_Init(void)
{u8 retry=10,t; u8 temp=1;GPIO_InitTypeDef GPIO_InitStructure;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF|RCC_AHB1Periph_GPIOC, ENABLE);//使能GPIOC,GPIOF时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //LED对应引脚GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//普通输入模式GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MGPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化GPIOC0GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;//KEY对应引脚GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通输出模式GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHzGPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉GPIO_Init(GPIOF, &GPIO_InitStructure); //根据设定参数初始化PF6GPIO_SetBits(GPIOF,GPIO_Pin_6);usart3_init(9600); //初始化串口3为:9600,波特率.while(retry--){HC05_KEY=1; //KEY置高,进入AT模式delay_ms(10);u3_printf("AT\r\n"); //发送AT测试指令HC05_KEY=0; //KEY拉低,退出AT模式for(t=0;t<10;t++) //最长等待50ms,来接收HC05模块的回应{if(USART3_RX_STA&0X8000)break;delay_ms(5);} if(USART3_RX_STA&0X8000) //接收到一次数据了{temp=USART3_RX_STA&0X7FFF; //得到数据长度USART3_RX_STA=0; if(temp==4&&USART3_RX_BUF[0]=='O'&&USART3_RX_BUF[1]=='K'){temp=0;//接收到OK响应break;}} } if(retry==0)temp=1; //检测失败return temp;
}
//获取ATK-HC05模块的角色
//返回值:0,从机;1,主机;0XFF,获取失败.
u8 HC05_Get_Role(void)
{ u8 retry=0X0F;u8 temp,t;while(retry--){HC05_KEY=1; //KEY置高,进入AT模式delay_ms(10);u3_printf("AT+ROLE?\r\n"); //查询角色for(t=0;t<20;t++) //最长等待200ms,来接收HC05模块的回应{delay_ms(10);if(USART3_RX_STA&0X8000)break;} HC05_KEY=0; //KEY拉低,退出AT模式if(USART3_RX_STA&0X8000) //接收到一次数据了{temp=USART3_RX_STA&0X7FFF; //得到数据长度USART3_RX_STA=0; if(temp==13&&USART3_RX_BUF[0]=='+')//接收到正确的应答了{temp=USART3_RX_BUF[6]-'0';//得到主从模式值break;}} }if(retry==0)temp=0XFF;//查询失败.return temp;
}
//ATK-HC05设置命令
//此函数用于设置ATK-HC05,适用于仅返回OK应答的AT指令
//atstr:AT指令串.比如:"AT+RESET"/"AT+UART=9600,0,0"/"AT+ROLE=0"等字符串
//返回值:0,设置成功;其他,设置失败.
u8 HC05_Set_Cmd(u8* atstr)
{ u8 retry=0X0F;u8 temp,t;while(retry--){HC05_KEY=1; //KEY置高,进入AT模式delay_ms(10);u3_printf("%s\r\n",atstr); //发送AT字符串HC05_KEY=0; //KEY拉低,退出AT模式for(t=0;t<20;t++) //最长等待100ms,来接收HC05模块的回应{if(USART3_RX_STA&0X8000)break;delay_ms(5);} if(USART3_RX_STA&0X8000) //接收到一次数据了{temp=USART3_RX_STA&0X7FFF; //得到数据长度USART3_RX_STA=0; if(temp==4&&USART3_RX_BUF[0]=='O')//接收到正确的应答了{ temp=0;break; }} }if(retry==0)temp=0XFF;//设置失败.return temp;
}
///
//通过该函数,可以利用USMART,调试接在串口3上的ATK-HC05模块
//str:命令串.(这里注意不再需要再输入回车符)
void HC05_CFG_CMD(u8 *str)
{ u8 temp;u8 t; HC05_KEY=1; //KEY置高,进入AT模式delay_ms(10);u3_printf("%s\r\n",(char*)str); //发送指令for(t=0;t<50;t++) //最长等待500ms,来接收HC05模块的回应{if(USART3_RX_STA&0X8000)break;delay_ms(10);} HC05_KEY=0; //KEY拉低,退出AT模式if(USART3_RX_STA&0X8000) //接收到一次数据了{temp=USART3_RX_STA&0X7FFF; //得到数据长度USART3_RX_STA=0;USART3_RX_BUF[temp]=0; //加结束符 printf("\r\n%s",USART3_RX_BUF);//发送回应数据到串口1}
}
此部分代码总共 4 个函数:
1,HC05_Init 函数,该函数用于初始化与 ATK-HC05 连接
的 IO 口,并通过 AT 指令检测 ATK-HC05 蓝牙模块是否已经连接。
2 ,HC05_Get_Role 函数,该函数用于获取 ATK-HC05 蓝牙模块的主从状态,这里利用 AT+ROLE?指令获取模块的主从状态。
3,HC05_Set_Cmd 函数,该函数是一个 ATK-HC05 蓝牙模块的通用设置指令,通过调用该函数,可以方便的修改ATK-HC05蓝牙串口模块的各种设置。
4,HC05_CFG_CMD函数,该函数专为 USMART 调试组件提供,专用于 USMART 测试 ATK-HC05 蓝牙串口模块的AT指令,在不需要USMART调试的时候,该函数可以去掉。注意要将HC05_CFG_CMD添加到 usmart_nametab 里面,才能通过 USMART 调用该函数哦!
- 主函数
int main(void)
{ u8 t;u8 key;u8 sendmask=0;u8 sendcnt=0;u8 sendbuf[20]; u8 reclen=0; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2delay_init(168); //初始化延时函数uart_init(115200); //初始化串口波特率为115200usmart_dev.init(84); //初始化USMART LED_Init(); //初始化LEDKEY_Init(); //初始化按键delay_ms(1000); //等待蓝牙模块上电稳定while(HC05_Init()) //初始化ATK-HC05模块 {LED1=0;delay_ms(500);LED1=1;delay_ms(100);} delay_ms(100);USART3_RX_STA=0;while(1) { key=KEY_Scan(0);if(key==WKUP_PRES) //切换模块主从设置{key=HC05_Get_Role();if(key!=0XFF){key=!key; //状态取反 if(key==0)HC05_Set_Cmd("AT+ROLE=0");else HC05_Set_Cmd("AT+ROLE=1");HC05_Set_Cmd("AT+RESET"); //复位ATK-HC05模块delay_ms(200);}}else if(key==KEY0_PRES){sendmask=!sendmask; //发送/停止发送 }else delay_ms(10); if(t==50){if(sendmask) //定时发送{sprintf((char*)sendbuf,"ALIENTEK HC05 %d\r\n",sendcnt);u3_printf("ALIENTEK HC05 %d\r\n",sendcnt); //发送到蓝牙模块sendcnt++;if(sendcnt>99)sendcnt=0;} t=0;LED0=!LED0; } if(USART3_RX_STA&0X8000) //接收到一次数据了{reclen=USART3_RX_STA&0X7FFF; //得到数据长度USART3_RX_BUF[reclen]=0; //加入结束符if(reclen==9||reclen==8) //控制DS1检测{if(strcmp((const char*)USART3_RX_BUF,"+LED1 ON")==0)LED1=0; //打开LED1if(strcmp((const char*)USART3_RX_BUF,"+LED1 OFF")==0)LED1=1;//关闭LED1}USART3_RX_STA=0; } t++; }
}
注意:
①执行 INIT 命令,把模块初始化为蓝牙的 SPP 规范,只有执行了这个命令后,蓝牙模块才能进行扫描、配对、连接、串口透传等操作。
②若模块未处于连接状态,根据主模式或从模式进行不同的操作(上电后默认为从模式,按下WKUP_PRES 后,模块会进入主模式)。主模式下,尝试扫描周边的蓝牙设备,若找到“HC05”名字的设备则进行主动连接。从模式下,执行 INQ 命令,只有执行这个命令,HC05 模块才会向周边发射蓝牙讯号,不然是不会被其它蓝牙设备找到的。
③若模块处于连接状态,定时检查接收缓冲区,判断接收到的字符串是否为“AT+LED1=ON”和“AT+LED1=OFF”命令,若是则进行相应的操作,若不是则把接收缓冲区的第一行字符串显示出来。在这里用户可参照该范例自定义其它的命令。
二、通信模块
2.1 模块简介
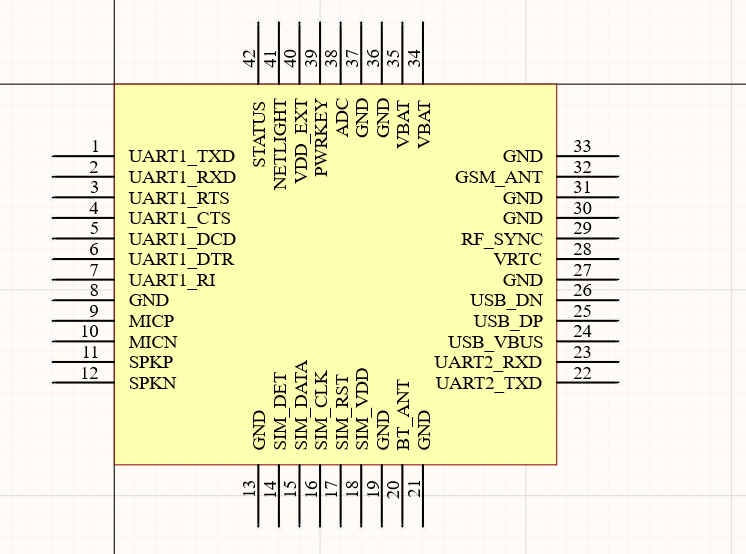
GSM以SIM800C模块为例,SIM800C可通过串口传输标准的 AT 命令对模块进行控制,可为产品提供简单方便的 GSM 语音、短信、GPRS 的数据通讯(TCP 通信和 UDP 通信)、蓝牙(SPP 通信),本章主要介绍GPRS功能
2.2 AT指令简介
AT 即 Attention,AT 指令集是从终端设备(Terminal Equipment,TE)或数据终端设备(Data Terminal Equipment,DTE)向终端适配器(Terminal Adapter, TA)或数据电路终端设备(Data Circuit Terminal Equipment,DCE)发送的。通过 TA,TE 发送 AT 指令来控制移动台(Mobile Station,MS)的功能,与 GSM 网络业务进行交互。用户可以通过 AT 指令进行呼叫、短信、电话本、数据业务、传真等方面的控制。
AT 指令必须以"AT"或"at"开头,以回车()结尾。模块的响应通常紧随其后,格式为:<回车><换行><响应内容><回车><换行>。
2.2.1 常用AT指令
- AT+CPIN?
该指令用于查询 SIM 卡的状态,主要是 PIN 码,如果该指令返回:+CPIN:READY,则表明SIM 卡状态正常,返回其他值,则有可能是没有 SIM 卡。 - AT+CSQ
该指令用于查询信号质量,返回 SIM800C 模块的接收信号强度,如返回:+CSQ:24,0,表示信号强度是 24(最大的有效值是 31) - AT+COPS?
该指令用于查询当前运营商,该指令只有在连上网络后,才返回运营商,否则返回空,如返回:+COPS:0,0,”CHINA MOBILE”,表示当前选择的运营商是中国移动。 - AT+CGMI
该指令用于查询模块制造商,如返回:SIMCOM_Ltd,说明 SIM800C 模块是 SIMCOM 公司生产的。 - AT+CGMM
该指令用于查询模块型号,如返回:SIMCOM_SIM800C,说明模块型号是 SIM800C。 - AT+CGSN
该指令用于查询产品序列号(集 IMEI 号),每个模块的 IMEI 号都是不一样的,具有全球唯一性,如返回:866104023267696,说明模块的产品序列号是:866104023267696。 - AT+CNUM
该指令用于查询本机号码,必须在 SIM 卡在位的时候才可以查询,如返回:+CNUM:””,”136******”,”129”,7,4,则表明本机号码为:136******。另外,不是所有的 SIM卡都支持这个指令,有个别 SIM 卡无法通过此指令得到其号码。 - ATE1
该指令用于设置回显模式(默认开启),即模块将收到的 AT 指令完整的返回给发送端,启用该功能,有利于调试模块。如果不需要开启回显模式,则发送 ATE0 指令即可关闭,这样收到的指令将不再返回给发送端,这样方便程序控制。 - AT+CGMR
该指令用于查询固件版本序列号,如返回:Revision:1418B02SIM800C32_BT,说明模块的固件版本序列号是 1418B02SIM800C32_BT,flash 大小是 32Mbit、支持蓝牙通信功能。
2.2.2 拨打/接听电话
- ATE0
用于关闭回显,在通过电脑串口调试助手调试的时候,我们发送:ATE1,开启回显,可以方便调试,但是我们通过单片机程序控制的时候,用不到回显功能,所以发送:ATE0,将其关闭。 - ATD
用于拨打任意电话号码,格式为:ATD+号码+;,末尾的’;’一定要加上,否则不能成功拨号,如发送:ATD10086;,即可实现拨打 10086。 - ATA
用于应答电话,当收到来电的时候,给模块发送:ATA,即可接听来电。 - ATH
用于挂断电话,要想结束正在进行的通话,只需给模块发送:ATH,即可挂断。 - AT+COLP
用于设置被叫号码显示,这里我们通过发送:AT+COLP=1,开启被叫号码显示,当成功拨通的时候(被叫接听电话),模块会返回被叫号码。 - AT+CLIP
用于设置来电显示,通过发送:AT+CLIP=1,可以实现设置来电显示功能,模块接收到来电的时候,会返回来电号码。 - AT+VTS
产生 DTMF 音,该指令只有在通话进行中才有效,用于向对方发送 DTMF 音,比如在拨打 10086 查询的时候,我们可以通过发送:AT+VTS=1,模拟发送按键 1。
2.2.3 短信的读取与发送
- AT+CNMI
用于设置新消息指示。发送:AT+CNMI=2,1,设置新消息提示,当收到新消息,且 SIM 卡未满的时候,SIM800C 模块会通过串口输出数据,如:+CMTI: “SM”,2,表示收到接收到新消息,存储在 SIM 卡的位置 2。 - AT+CMGF
用于设置短消息模式,SIM800C 支持 PDU 模式和文本(TEXT)模式等 2 种模式,发送:AT+CMGF=1,即可设置为文本模式。 - AT+CSCS
用于设置 TE 字符集,默认的为 IRA,国际标准字符集,在发送纯英文短信的时候,发送:AT+CSCS=“GSM”,设置为缺省字符集即可。在发送中英文短信的时候,需要发送:AT+CSCS="UCS2"设置为 16 位通用 8 字节倍数编码字符集。 - AT+CSMP
用于设置短消息文本模式参数,在使用 UCS2 方式发送中文短信的时候,需要发送:AT+CSMP=17,167,2,25,设置文本模式参数。 - AT+CMGR
用于读取短信,比如发送:AT+CMGR=1,则可以读取 SIM 卡存储在位置 1的短信。 - AT+CMGS
用于发送短信,在"GSM"字符集下,最大可以发送 180 个字节的英文字符,在"UCS2"字符集下,最大可以发送 70 个汉字(包括字符/数字)。 - AT+CPMS
用于查询/设置优选消息存储器,通过发送:AT+CPMS?,可以查询当前 SIM 卡最大支持多少条短信存储,以及当前存储了多少条短信等信息。如返回:+CPMS:”SM_P”,1,50,”SM_P”,1,50,”SM_P”,1,50,表示当前 SIM 卡最大存储 50 条信息,目前已经有 1 条存储的信息。
2.3.4 GPRS 通信
- AT+CGCLASS
用于设置移动台类别。SIM800C 模块支持类别"B"、"CG"和”CC”,发送:AT+CGCLASS=“B”,设置移动台台类别为 B。即,模块支持包交换和电路交换模式,但不能同时支持。 - AT+CGDCONT
用于设置 PDP 上下文。发送AT+CGDCONT=1,“IP”,“CMNET”,设置 PDP上下文标标志为 1,采用互联网协议(IP),接入点为"CMNET"。 - AT+CGATT
用于设置附着和分离 GPRS 业务。发送:AT+CGATT=1,附着 GPRS 业务。 - AT+CIPCSGP
用于设置 CSD 或 GPRS 链接模式。发送:AT+CIPCSGP=1, “CMNET”,设置为GPRS 连接,接入点为”CMNET”。 - AT+ CIPHEAD
用于设置接收数据是否显示 IP 头。发送:AT+CIPHEAD=1,即设置显示 IP头,在收到 TCP/UDP 数据的时候,会在数据之前添加如:+IPD:28,表示是 TCP/UDP 数据,数据长度为 28 字节。通过这个头,可以方便我们在程序上区分数据来源。 - AT+CLPORT
用于设置本地端口号。发送:AT+CLPORT=“TCP”,“8888”,即设置 TCP 连接本地端口号为 8888。 - AT+CIPSTART
用于建立 TCP 连接或注册 UDP 端口号。发送: AT+CIPSTART=“TCP”,“219.137.88.114”,“8086”,模块将建立一个 TCP 连接,连接目标地址为:219.137.88.114,连接端口为 8086,连接成功会返回:CONNECT OK。 - AT+CIPSEND
用于发送数据。在连接成功以后发送:AT+CIPSEND,模块返回:>,此时可以输入要发送的数据,最大可以一次发送 1352 字节,数据输入完后,同发短信一样,输入十六进制的:1A(0X1A),启动发送数据。在数据发送完成后,模块返回:SEND OK,表示发送成功。 - AT+CIPSTATUS
用于查询当前连接状态。发送:AT+CIPSTATUS,模块即返回当前连接状态。 - AT+CIPCLOSE
用于关闭 TCP/UDP 连接。发送:AT+CIPCLOSE=1,即可快速关闭当前 TCP/UDP连接。 - AT+CIPSHUT
用于关闭移动场景。发送:AT+SHUT,则可以关闭移动场景,关闭场景后连接状态为:IP INITIAL,可以通过发送:AT+CIPSTATUS,查询。另外,在连接建立后,如果收到:+PDP: DEACT,则必须发送:AT+CIPSHUT,关闭场景后,才能实现重连。
2.3 TCP通信示例代码
- usart函数
串口配置见蓝牙部分,基本一致
其中串口发送函数也可以作以下修改
static void USART3_SendByte(uint8_t dat)
{USART_SendData(USART3,dat);while (USART_GetFlagStatus(USART3, USART_FLAG_TC) == RESET); //等待发送结束
}///*****************发送字符串**********************/
void USART3_SendString(uint8_t *pstr)
{uint8_t *str;str=pstr;while(*str!='\0'){USART3_SendByte(*str);str++;}
}//发送举例
uint8_t Request_Module_ID_CMD[] = "AT+CGMM\r\n";
USART3_SendString(Request_Module_ID_CMD);
- SIMCOM函数
//usmart支持部分
//将收到的AT指令应答数据返回给电脑串口
//mode:0,不清零USART3_RX_STA;
// 1,清零USART3_RX_STA;
void sim_at_response(u8 mode)
{if(USART3_RX_STA&0X8000) //接收到一次数据了{ USART3_RX_BUF[USART3_RX_STA&0X7FFF]=0;//添加结束符printf("%s",USART3_RX_BUF); //发送到串口if(mode)USART3_RX_STA=0;}
}
//
//ATK-SIM800C 各项测试(拨号测试、短信测试、GPRS测试、蓝牙测试)共用代码
//SIM800C发送命令后,检测接收到的应答
//str:期待的应答结果
//返回值:0,没有得到期待的应答结果
//其他,期待应答结果的位置(str的位置)
u8* sim800c_check_cmd(u8 *str)
{char *strx=0;if(USART3_RX_STA&0X8000) //接收到一次数据了{ USART3_RX_BUF[USART3_RX_STA&0X7FFF]=0;//添加结束符strx=strstr((const char*)USART3_RX_BUF,(const char*)str);} return (u8*)strx;
}//向SIM800C发送命令
//cmd:发送的命令字符串(不需要添加回车了),当cmd<0XFF的时候,发送数字(比如发送0X1A),大于的时候发送字符串.
//ack:期待的应答结果,如果为空,则表示不需要等待应答
//waittime:等待时间(单位:10ms)
//返回值:0,发送成功(得到了期待的应答结果)
// 1,发送失败
u8 sim800c_send_cmd(u8 *cmd,u8 *ack,u16 waittime)
{u8 res=0; USART3_RX_STA=0;if((u32)cmd<=0XFF){while((USART3->SR&0X40)==0);//等待上一次数据发送完成 USART3->DR=(u32)cmd;}else u3_printf("%s\r\n",cmd); //发送命令if(ack&&waittime) //需要等待应答{while(--waittime) //等待倒计时{ delay_ms(10);if(USART3_RX_STA&0X8000)//接收到期待的应答结果{if(sim800c_check_cmd(ack))break;//得到有效数据 USART3_RX_STA=0;} }if(waittime==0)res=1; }return res;
}//SIMCOM信息
void sim800c_device_info(void)
{if(sim800c_send_cmd("AT+CGMI","OK",200)==0) //查询制造商名称{ printf("制造商:%s\r\n",USART3_RX_BUF+2);USART3_RX_STA=0; } if(sim800c_send_cmd("AT+CGMM","OK",200)==0) //查询模块名字{ printf("模块型号:%s\r\n",USART3_RX_BUF+2);USART3_RX_STA=0; } if(sim800c_send_cmd("AT+CGSN","OK",200)==0) //查询产品序列号{ printf("序列号:%s\r\n",USART3_RX_BUF+2);USART3_RX_STA=0; }if(sim800c_send_cmd("AT+CNUM","+CNUM",200)==0) //查询本机号码{ printf("本机号码:%s\r\n",USART3_RX_BUF+2);USART3_RX_STA=0; }
}//NTP网络同步时间
void ntp_update(void)
{ sim800c_send_cmd("AT+SAPBR=3,1,\"Contype\",\"GPRS\"","OK",200);//配置承载场景1sim800c_send_cmd("AT+SAPBR=3,1,\"APN\",\"CMNET\"","OK",200);sim800c_send_cmd("AT+SAPBR=1,1",0,200);//激活一个GPRS上下文delay_ms(5);sim800c_send_cmd("AT+CNTPCID=1","OK",200);//设置CNTP使用的CIDsim800c_send_cmd("AT+CNTP=\"202.120.2.101\",32","OK",200);//设置NTP服务器和本地时区(32时区 时间最准确)sim800c_send_cmd("AT+CNTP","+CNTP: 1",600);//同步网络时间}//GSM信息显示(信号质量,电池电量,日期时间)
//返回值:0,正常
//其他,错误代码
void gsm_info(void)
{u8 res=0,*p;USART3_RX_STA=0;if(sim800c_send_cmd("AT+CPIN?","OK",200))res|=1<<0; //查询SIM卡是否在位 USART3_RX_STA=0; if(sim800c_send_cmd("AT+COPS?","OK",200)==0) //查询运营商名字{ p1=(u8*)strstr((const char*)(USART3_RX_BUF),"\""); if(p1)//有有效数据{ printf("运营商:%s\r\n",p1+1);} USART3_RX_STA=0; }if(sim800c_send_cmd("AT+CSQ","+CSQ:",200)==0) //查询信号质量{ printf("信号质量:%s\r\n",p1+2);USART3_RX_STA=0; }if(sim800c_send_cmd("AT+CBC","+CBC:",200)==0) //查询电池电量{ printf("电池电量:%s%% %smV\r\n",p1+1,p2+1);USART3_RX_STA=0; }if(sim800c_send_cmd("AT+CCLK?","+CCLK:",200)==0) //查询电池电量{ printf("日期时间:%s\r\n",p1+1);USART3_RX_STA=0; }//return res;
}//断开网络,关闭场景
void gsm_gprs_close(void)
{USART3_RX_STA=0;sim800c_send_cmd("AT+CIPCLOSE=1","CLOSE OK",500); //关闭连接sim800c_send_cmd("AT+CIPSHUT","SHUT OK",500); //关闭移动场景
}//初始化并检测模块
//0表示成功,其他表示失败
u8 gsm_init(void)
{usart3_init(115200); //初始化串口USART3_RX_STA=0;//串口助手显示sim800c_device_info();ntp_update();gsm_info();USART3_RX_STA=0;gsm_gprs_close();if(sim800c_send_cmd("AT+CGCLASS=\"B\"","OK",1000))return 1; //设置GPRS移动台类别为B,支持包交换和数据交换 if(sim800c_send_cmd("AT+CGDCONT=1,\"IP\",\"CMNET\"","OK",1000))return 2;//设置PDP上下文,互联网接协议,接入点等信息if(sim800c_send_cmd("AT+CGATT=1","OK",500))return 3; //附着GPRS业务if(sim800c_send_cmd("AT+CIPCSGP=1,\"CMNET\"","OK",500))return 4; //设置为GPRS连接模式if(sim800c_send_cmd("AT+CIPHEAD=1","OK",500))return 5; //设置接收数据显示IP头(方便判断数据来源)return 0;
}const u8 *modetbl[2]={"TCP","UDP"};//连接模式//tcp/udp连接
//mode:0:TCP测试;1,UDP测试)
//localport:本地端口
//ipaddr:ip地址
//serverport:服务器端口
//连接成功返回0
u8 sim800c_tcpudp_link(u8 mode,char* localport,u8* ipaddr,char* serverport)
{ char cmd_buf[100];u8 *p,connectcnt=0; //0,正在连接;1,连接成功;2,连接关闭; USART3_RX_STA=0;sprintf(cmd_buf,"AT+CLPORT=\"UDP\",\"%s\"\r",localport);if(sim800c_send_cmd(cmd_buf,"OK", 100))return 1; //设置本地端口号,可以省略USART3_RX_STA=0;sprintf((char*)p,"AT+CIPSTART=\"%s\",\"%s\",\"%s\"",modetbl[mode],ipaddr,serverport);if(sim800c_send_cmd(p,"OK",500))return 2; //发起连接return 0;
}//使用GPRS发送数据,发送前需要先建立UDP或TCP连接
//str: 要发送的数据
//返回值:0成功,1失败
u8 gsm_gprs_send(const char * str)
{char end = 0x1A;u8 testSend=0;USART3_RX_STA=0;if(sim800c_send_cmd("AT+CIPSEND",">",500)==0) //发送数据{printf("CIPSEND DATA:%s\r\n",str); //发送数据打印到串口u3_printf("%s\r\n",str);delay_ms(10);USART3_RX_STA=0; //检测是否发送完成if(sim800c_send_cmd((u8*)0X1A,"SEND OK",1000)==0){ printf("数据发送成功!");//最长等待10sreturn 0;}else{ if(++testSend >200)//最长等待20秒{goto gprs_send_failure;}delay_ms(100); } }else{
gprs_send_failure:printf("数据发送失败!");sim800c_send_cmd((u8*)0X1B,0,0); //ESC,取消发送return 1;}
}
此部分总共包含个函数:
1,sim_at_response是串口调试函数
2,sim800c_check_cmd用来检测SIM800C 模块发送回来的应答/数据
3,sim800c_send_cmd该函数用于向SIM800C模块发送命令
4,gsm_init是模块初始化函数,其中包含了对SIMCOM信息、NTP网络同步时间以及信号信息的更新和显示
5,gsm_gprs_close用来断开网络,关闭场景
6,sim800c_tcpudp_link用来建立tcp/udp连接
7,gsm_gprs_send
- 功能测试函数
//系统软件复位
void Soft_Reset(void)
{__set_FAULTMASK(1); //关闭所有中断 NVIC_SystemReset(); //系统复位
}//根据具体情况修改
#define LOCALPORT "2000"
#define SERVERIP "163.142.57.125"
#define SERVERPORT "5000"const char *TESTBUFF="\r\nGSM模块TCP数据上传功能测试";//SIM800C主测试程序
void sim800c_test(void)
{ u8 timex=0;while(sim800c_send_cmd("AT","OK",100))//检测是否应答AT指令 {delay_ms(800);} key+=sim800c_send_cmd("ATE0","OK",200); //选择功能while(gsm_init()!= 0) //检查模块初始化{printf("\r\n模块响应测试不正常!\r\n");delay_ms(1000); }while(1){delay_ms(10); sim_at_response(1);//检查GSM模块发送过来的数据,及时上传给电脑if(sim800c_tcpudp_link(1,LOCALPORT,SERVERIP,SERVERPORT)==0)//连接失败{if(gsm_gprs_send(TESTBUFF)==0)printf("\n发送数据成功\n");else{printf("\r\nTCP发送数据失败,请检测正确设置各个模块\r\n");GSM_DELAY(100);gsm_gprs_close();}}else{printf("\r\nTCP链接失败,请检测正确设置各个模块\r\n");delay_ms(1000);gsm_gprs_close();delay_ms(100);Soft_Reset();} if((timex%20)==0)LED0=!LED0;//200ms闪烁 timex++; }
}
三、GPS模块
3.1 GPS模块简介
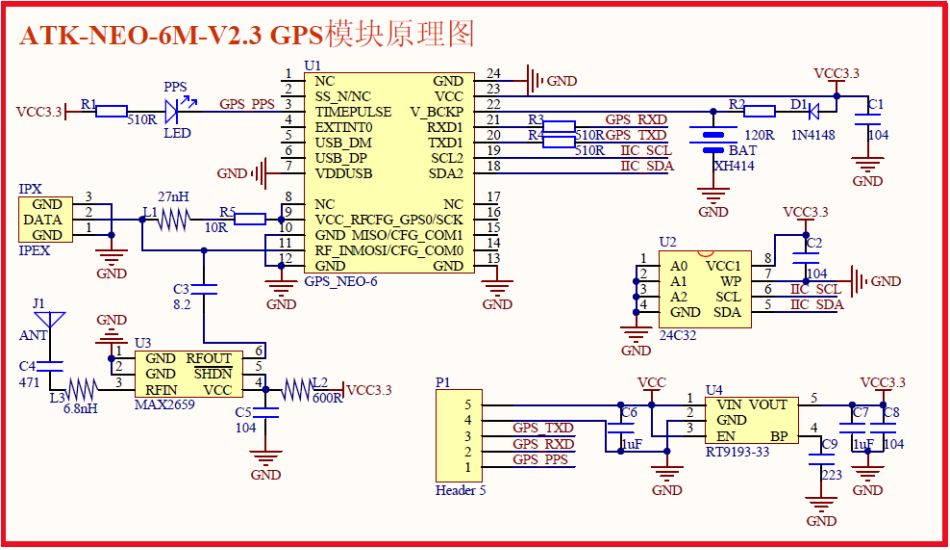
GPS模块以NEO-6M为例,模块核心采用 UBLOX 公司的 NEO-6M 模组
NEO-6M 模块各引脚功能描述:
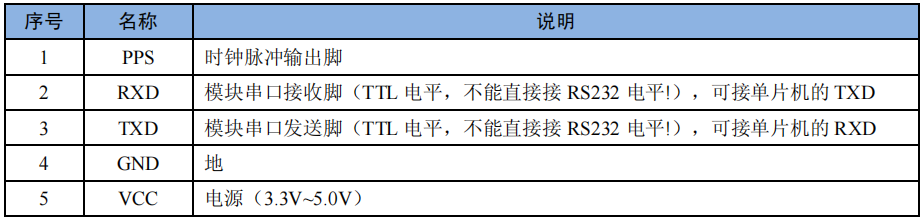
其中,PPS 引脚同时连接到了模块自带了的状态指示灯:PPS,该引脚连接在 UBLOX NEO-6M 模组的 TIMEPULSE 端口,该端口的输出特性可以通过程序设置。PPS 指示灯(即 PPS引脚),在默认条件下(没经过程序设置),有 2 个状态:
1, 常亮,表示模块已开始工作,但还未实现定位。
2, 闪烁(100ms 灭,900ms 亮),表示模块已经定位成功。
3.2 GPS常用通信协议
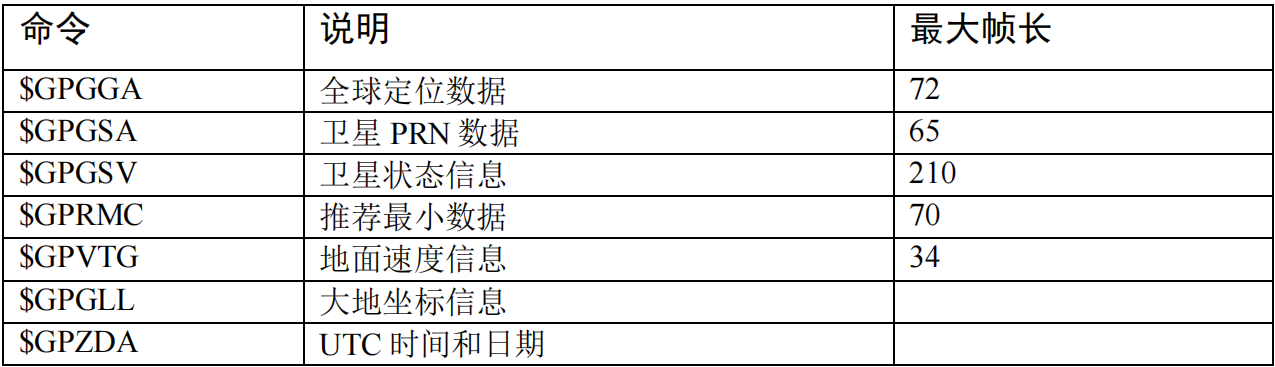
ATK-NEO-6M 模块默认采用 NMEA-0183 协议输出 GPS 定位数据,并可以通过 UBX 协议对模块进行配置
3.2.1 NMEA-0183协议
常用 NMEA-0183 语句的字段定义
该协议采用 ASCII 码,帧格式形如:
$aaccc,ddd,ddd,…,ddd*hh< CR >< LF >
“ $ ”——帧命令起始位
aaccc——地址域,前两位为识别符,后三位为语句名
ddd…ddd——数据
“ * ”——校验和前缀
hh——校验和(check sum),$ 与 *之间所有字符 ASCII 码的校验和(各字节做异或运算,得到校验和后,再转换 16进制格式的 ASCII 字符。)
< CR>< LF>——CR(Carriage Return) + LF(Line Feed)帧结束,回车和换行
- GPGGA
GPS 固定数据输出语句(Global positioning system fix data)
格式:
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>,<14>*<15>< CR>< LF>
例子:$GPGGA,092725.00,4717.11399,N,00833.91590,E,1,8,1.01,499.6,M,48.0,M,0*5B
<1> UTC 时间,格式为 hhmmss.sss
<2> 纬度,格式为 ddmm.mmmm(前导位数不足则补 0)
<3> 纬度半球,N 或 S(北纬或南纬)
<4> 经度,格式为 dddmm.mmmm(前导位数不足则补 0)
<5> 经度半球,E 或 W(东经或西经)
<6> 定位质量指示,0=定位无效,1=标准定位,2=差分定位,6=估算
<7> 使用卫星数量,从 00 到 12(前导位数不足则补 0)
<8> 水平精确度,0.5 到 99.9
<9> 天线离海平面的高度,-9999.9 到 9999.9 米
<10> 高度单位,M 表示单位米
<11> 大地椭球面相对海平面的高度(-999.9 到 9999.9)
<12> 高度单位,M 表示单位米
<13> 差分 GPS 数据期限(RTCM SC-104),最后设立 RTCM 传送的秒数量
<14> 差分参考基站标号,从 0000 到 1023(前导位数不足则补 0)
<15> 校验和。
- GPGSA
GPS 精度指针及使用卫星 (GNSS DOP and Active Satellites)。格式:
$GPGSA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>,<14>,<15>,<16>,<17>*<18>< CR>< LF>
例子:$GPGSA,A,3,23,29,07,08,09,18,26,28,1.94,1.18,1.54*0D
<1> 模式 2:M = 手动, A = 自动
<2> 模式 1:定位型式 1 = 未定位,2 = 二维定位,3 = 三维定位
<3> 第 1 信道正在使用的卫星 PRN 码编号(Pseudo Random Noise,伪随机噪声码),01至 32(前导位数不足则补 0,最多可接收 12 颗卫星信息)
<4> 第 2 信道正在使用的卫星 PRN 码编号
<5> 第 3 信道正在使用的卫星 PRN 码编号
<6> 第 4 信道正在使用的卫星 PRN 码编号
<7> 第 5 信道正在使用的卫星 PRN 码编号
<8> 第 6 信道正在使用的卫星 PRN 码编号
<9> 第 7 信道正在使用的卫星 PRN 码编号
<10> 第 8 信道正在使用的卫星 PRN 码编号
<11> 第 9 信道正在使用的卫星 PRN 码编号
<12> 第 10 信道正在使用的卫星 PRN 码编号
<13> 第 11 信道正在使用的卫星 PRN 码编号
<14> 第 12 信道正在使用的卫星 PRN 码编号
<15> PDOP 综合位置精度因子(0.5 - 99.9)
<16> HDOP 水平精度因子(0.5 - 99.9)
<17> VDOP 垂直精度因子(0.5 - 99.9)
<18> 校验和
- GPGSV
可视卫星状态输出语句 (GNSS Satellites in View)。格式:
$GPGSV, <1>,<2>,<3>,<4>,<5>,<6>,<7>,…,<4>,<5>,<6>,<7>*<8>< CR>< LF>
例子:$GPGSV,3,1,10,23,38,230,44,29,71,156,47,07,29,116,41,08,09,081,36*7F
<1> 总的 GSV 语句电文数
<2> 当前 GSV 语句号
<3> 可视卫星总数,00 至 12
<4> 卫星编号,01 至 32
<5> 卫星仰角,00 至 90 度
<6> 卫星方位角,000 至 359 度。实际值
<7> 信噪比(C/No),00 至 99dB;无表示未接收到讯号
<8> 校验和。
- GPRMC
推荐最小数据量的 GPS 信息(Recommended Minimum Specific GPS/TRANSIT Data)。格式:
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*<13>< CR>< LF>
例子:$GPRMC,083559.00,A,4717.11437,N,00833.91522,E,0.004,77.52,091202,A*57
<1> UTC(Coordinated Universal Time)时间,hhmmss(时分秒)格式
<2> 定位状态,A=有效定位,V=无效定位
<3> Latitude,纬度 ddmm.mmmm(度分)格式(前导位数不足则补 0)
<4> 纬度半球 N(北半球)或 S(南半球)
<5> Longitude,经度 dddmm.mmmm(度分)格式(前导位数不足则补 0
<6> 经度半球 E(东经)或 W(西经)
<7> 地面速率(000.0~999.9 节,Knot,前导位数不足则补 0)
<8> 地面航向(000.0~359.9 度,以真北为参考基准,前导位数不足则补 0)
<9> UTC 日期,ddmmyy(日月年)格式
<10> Magnetic Variation,磁偏角(000.0~180.0 度,前导位数不足则补 0)
<11> Declination,磁偏角方向,E(东)或 W(西)
<12> Mode Indicator,模式指示(仅 NMEA0183 3.00 版本输出,A=自主定位,D=差分,
E=估算,N=数据无效)
<13> 校验和。
- GPVTG
地面速度信息(Course over ground and Ground speed)。格式:
$GPVTG,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>*<10>< CR>< LF>
例子:$GPVTG,77.52,T,M,0.004,N,0.008,K,A*06
<1> 以真北为参考基准的地面航向
<2> T,表示“真”
<3> 以磁北为参考基准的地面航向
<4> M,表示“磁场”
<5> 地面速率
<6> N,表示“节”
<7> 地面速率
<8> K,表示“千米/小时”
<9> 模式指示(A=自主定位,D=差分,E=估算,N=数据无效)
<10> 校验和
- GPGLL
定位地理信息(Latitude and longitude, with time of position fix and status) 格式:
$GPGLL,<1>,<2>,<3>,<4>,<5>,<6>,<7>*<8>< CR>< LF>
例子:$GPGLL,4717.11364,N,00833.91565,E,092321.00,A,A*60
<1> 纬度 ddmm.mmmmm(度分)
<2> 纬度半球 N(北半球)或 S(南半球)
<3> 经度 dddmm.mmmmm(度分)
<4> 经度半球 E(东经)或 W(西经)
<5> UTC 时间:hhmmss(时分秒)
<6> 定位状态,A=有效定位,V=无效定位
<7> 模式指示(A=自主定位,D=差分,E=估算,N=数据无效)
<8> 校验和
- GPZDA
当前时间信息:(Time and Date)格式:
$GPZDA,<1>,<2>,<3>,<4>,<5>,<6>*<7>< CR>< LF>
例子:$GPZDA,082710.00,16,09,2002,00,00*64
<1> UTC 时间:hhmmss(时分秒,格林威治时间)
<2> 日
<3> 月
<4> 年
<5> 本地区域小时(NEO-6M 不支持,为 00)
<6> 本地区域分钟(NEO-6M 不支持,为 00)
<7> 校验和
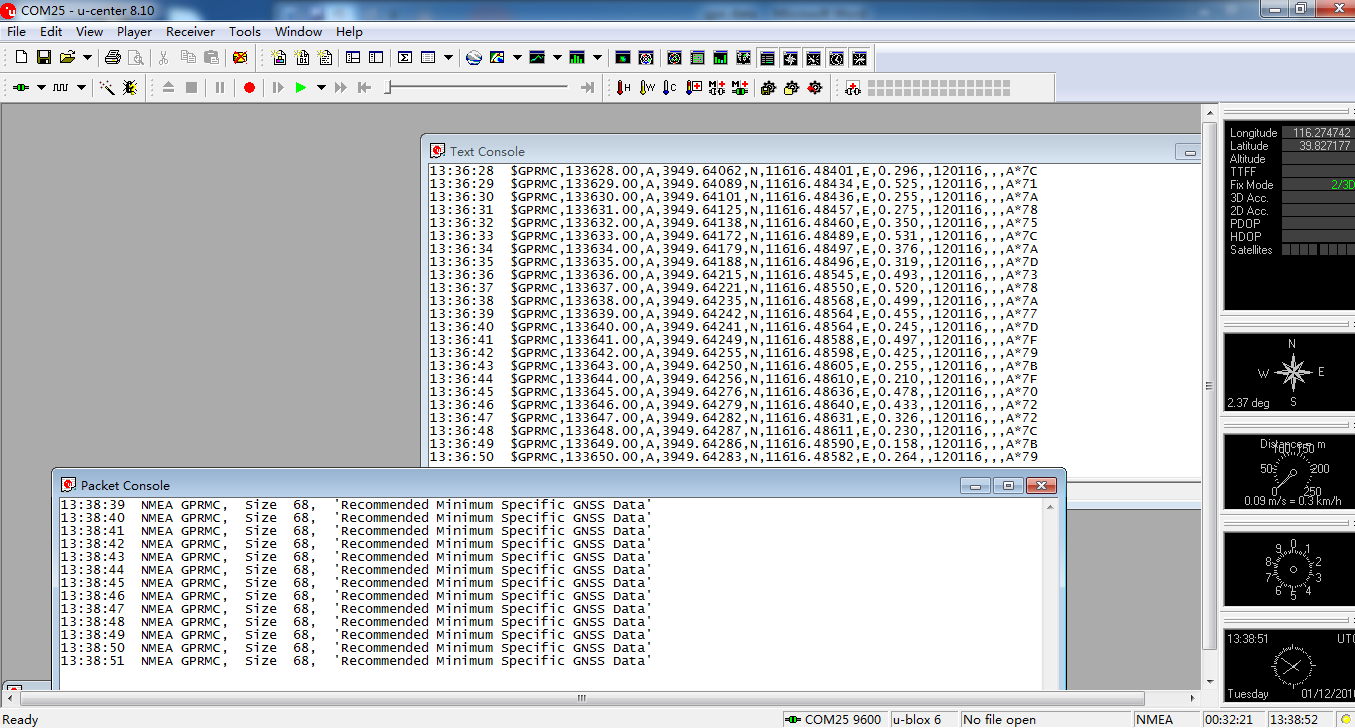
3.2.2 UBX协议
UBX协议是对模块进行配置的,此外也可以用u-blox 公司提供的 u-center 软件则具有配置模块工作方式的功能
3.3 示例代码
串口配置参照蓝牙部分
- gps_dc.h
对GPS NMEA-0183协议解码的结构体
#ifndef __GPS_H
#define __GPS_H #include "stm32f4xx.h"//GPS NMEA-0183协议重要参数结构体定义
//卫星信息
__packed typedef struct
{ u8 num; //卫星编号u8 eledeg; //卫星仰角u16 azideg; //卫星方位角u8 sn; //信噪比
}nmea_slmsg;
//UTC时间信息
__packed typedef struct
{ u16 year; //年份u8 month; //月份u8 date; //日期u8 hour; //小时u8 min; //分钟u8 sec; //秒钟
}nmea_utc_time;
//NMEA 0183 协议解析后数据存放结构体
__packed typedef struct
{ u8 svnum; //可见卫星数nmea_slmsg slmsg[12]; //最多12颗卫星nmea_utc_time utc; //UTC时间u32 latitude; //纬度 分扩大100000倍,实际要除以100000u8 nshemi; //北纬/南纬,N:北纬;S:南纬 u32 longitude; //经度 分扩大100000倍,实际要除以100000u8 ewhemi; //东经/西经,E:东经;W:西经u8 gpssta; //GPS状态:0,未定位;1,非差分定位;2,差分定位;6,正在估算. u8 posslnum; //用于定位的卫星数,0~12.u8 possl[12]; //用于定位的卫星编号u8 fixmode; //定位类型:1,没有定位;2,2D定位;3,3D定位u16 pdop; //位置精度因子 0~500,对应实际值0~50.0u16 hdop; //水平精度因子 0~500,对应实际值0~50.0u16 vdop; //垂直精度因子 0~500,对应实际值0~50.0 int altitude; //海拔高度,放大了10倍,实际除以10.单位:0.1m u16 speed; //地面速率,放大了1000倍,实际除以10.单位:0.001公里/小时
}nmea_msg;
//UBLOX NEO-6M 配置(清除,保存,加载等)结构体
__packed typedef struct
{ u16 header; //cfg header,固定为0X62B5(小端模式)u16 id; //CFG CFG ID:0X0906 (小端模式)u16 dlength; //数据长度 12/13u32 clearmask; //子区域清除掩码(1有效)u32 savemask; //子区域保存掩码u32 loadmask; //子区域加载掩码u8 devicemask; //目标器件选择掩码 b0:BK RAM;b1:FLASH;b2,EEPROM;b4,SPI FLASHu8 cka; //校验CK_A u8 ckb; //校验CK_B
}_ublox_cfg_cfg; //UBLOX NEO-6M 消息设置结构体
__packed typedef struct
{ u16 header; //cfg header,固定为0X62B5(小端模式)u16 id; //CFG MSG ID:0X0106 (小端模式)u16 dlength; //数据长度 8u8 msgclass; //消息类型(F0 代表NMEA消息格式)u8 msgid; //消息 ID //00,GPGGA;01,GPGLL;02,GPGSA;//03,GPGSV;04,GPRMC;05,GPVTG;//06,GPGRS;07,GPGST;08,GPZDA;//09,GPGBS;0A,GPDTM;0D,GPGNS;u8 iicset; //IIC消输出设置 0,关闭;1,使能.u8 uart1set; //UART1输出设置 0,关闭;1,使能.u8 uart2set; //UART2输出设置 0,关闭;1,使能.u8 usbset; //USB输出设置 0,关闭;1,使能.u8 spiset; //SPI输出设置 0,关闭;1,使能.u8 ncset; //未知输出设置 默认为1即可.u8 cka; //校验CK_A u8 ckb; //校验CK_B
}_ublox_cfg_msg; //UBLOX NEO-6M UART端口设置结构体
__packed typedef struct
{ u16 header; //cfg header,固定为0X62B5(小端模式)u16 id; //CFG PRT ID:0X0006 (小端模式)u16 dlength; //数据长度 20u8 portid; //端口号,0=IIC;1=UART1;2=UART2;3=USB;4=SPI;u8 reserved; //保留,设置为0u16 txready; //TX Ready引脚设置,默认为0u32 mode; //串口工作模式设置,奇偶校验,停止位,字节长度等的设置.u32 baudrate; //波特率设置u16 inprotomask; //输入协议激活屏蔽位 默认设置为0X07 0X00即可.u16 outprotomask; //输出协议激活屏蔽位 默认设置为0X07 0X00即可.u16 reserved4; //保留,设置为0u16 reserved5; //保留,设置为0 u8 cka; //校验CK_A u8 ckb; //校验CK_B
}_ublox_cfg_prt; //UBLOX NEO-6M 时钟脉冲配置结构体
__packed typedef struct
{ u16 header; //cfg header,固定为0X62B5(小端模式)u16 id; //CFG TP ID:0X0706 (小端模式)u16 dlength; //数据长度u32 interval; //时钟脉冲间隔,单位为usu32 length; //脉冲宽度,单位为ussigned char status; //时钟脉冲配置:1,高电平有效;0,关闭;-1,低电平有效. u8 timeref; //参考时间:0,UTC时间;1,GPS时间;2,当地时间.u8 flags; //时间脉冲设置标志u8 reserved; //保留 signed short antdelay; //天线延时signed short rfdelay; //RF延时signed int userdelay; //用户延时 u8 cka; //校验CK_A u8 ckb; //校验CK_B
}_ublox_cfg_tp; //UBLOX NEO-6M 刷新速率配置结构体
__packed typedef struct
{ u16 header; //cfg header,固定为0X62B5(小端模式)u16 id; //CFG RATE ID:0X0806 (小端模式)u16 dlength; //数据长度u16 measrate; //测量时间间隔,单位为ms,最少不能小于200ms(5Hz)u16 navrate; //导航速率(周期),固定为1u16 timeref; //参考时间:0=UTC Time;1=GPS Time;u8 cka; //校验CK_A u8 ckb; //校验CK_B
}_ublox_cfg_rate; int NMEA_Str2num(u8 *buf,u8*dx);
void GPS_Analysis(nmea_msg *gpsx,u8 *buf);
void NMEA_GPGSV_Analysis(nmea_msg *gpsx,u8 *buf);
void NMEA_GPGGA_Analysis(nmea_msg *gpsx,u8 *buf);
void NMEA_GPGSA_Analysis(nmea_msg *gpsx,u8 *buf);
void NMEA_GPGSA_Analysis(nmea_msg *gpsx,u8 *buf);
void NMEA_GPRMC_Analysis(nmea_msg *gpsx,u8 *buf);
void NMEA_GPVTG_Analysis(nmea_msg *gpsx,u8 *buf);
u8 Ublox_Cfg_Cfg_Save(void);
u8 Ublox_Cfg_Msg(u8 msgid,u8 uart1set);
u8 Ublox_Cfg_Prt(u32 baudrate);
u8 Ublox_Cfg_Tp(u32 interval,u32 length,signed char status);
u8 Ublox_Cfg_Rate(u16 measrate,u8 reftime);
void Ublox_Send_Date(u8* dbuf,u16 len);
#endif
- gps_dc.c
#include "gps.h"
#include "delay.h"
#include "usart3.h"
#include "stdio.h"
#include "stdarg.h"
#include "string.h"
#include "math.h"//从buf里面得到第cx个逗号所在的位置
//返回值:0~0XFE,代表逗号所在位置的偏移.
// 0XFF,代表不存在第cx个逗号
u8 NMEA_Comma_Pos(u8 *buf,u8 cx)
{ u8 *p=buf;while(cx){ if(*buf=='*'||*buf<' '||*buf>'z')return 0XFF;//遇到'*'或者非法字符,则不存在第cx个逗号if(*buf==',')cx--;buf++;}return buf-p;
}
//m^n函数
//返回值:m^n次方.
u32 NMEA_Pow(u8 m,u8 n)
{u32 result=1; while(n--)result*=m; return result;
}
//str转换为数字,以','或者'*'结束
//buf:数字存储区
//dx:小数点位数,返回给调用函数
//返回值:转换后的数值
int NMEA_Str2num(u8 *buf,u8*dx)
{u8 *p=buf;u32 ires=0,fres=0;u8 ilen=0,flen=0,i;u8 mask=0;int res;while(1) //得到整数和小数的长度{if(*p=='-'){mask|=0X02;p++;}//是负数if(*p==','||(*p=='*'))break;//遇到结束了if(*p=='.'){mask|=0X01;p++;}//遇到小数点了else if(*p>'9'||(*p<'0')) //有非法字符{ ilen=0;flen=0;break;} if(mask&0X01)flen++;else ilen++;p++;}if(mask&0X02)buf++; //去掉负号for(i=0;i<ilen;i++) //得到整数部分数据{ ires+=NMEA_Pow(10,ilen-1-i)*(buf[i]-'0');}if(flen>5)flen=5; //最多取5位小数*dx=flen; //小数点位数for(i=0;i<flen;i++) //得到小数部分数据{ fres+=NMEA_Pow(10,flen-1-i)*(buf[ilen+1+i]-'0');} res=ires*NMEA_Pow(10,flen)+fres;if(mask&0X02)res=-res; return res;
}
//分析GPGSV信息
//gpsx:nmea信息结构体
//buf:接收到的GPS数据缓冲区首地址
void NMEA_GPGSV_Analysis(nmea_msg *gpsx,u8 *buf)
{u8 *p,*p1,dx;u8 len,i,j,slx=0;u8 posx; p=buf;p1=(u8*)strstr((const char *)p,"$GPGSV");len=p1[7]-'0'; //得到GPGSV的条数posx=NMEA_Comma_Pos(p1,3); //得到可见卫星总数if(posx!=0XFF)gpsx->svnum=NMEA_Str2num(p1+posx,&dx);for(i=0;i<len;i++){ p1=(u8*)strstr((const char *)p,"$GPGSV"); for(j=0;j<4;j++){ posx=NMEA_Comma_Pos(p1,4+j*4);if(posx!=0XFF)gpsx->slmsg[slx].num=NMEA_Str2num(p1+posx,&dx); //得到卫星编号else break; posx=NMEA_Comma_Pos(p1,5+j*4);if(posx!=0XFF)gpsx->slmsg[slx].eledeg=NMEA_Str2num(p1+posx,&dx);//得到卫星仰角 else break;posx=NMEA_Comma_Pos(p1,6+j*4);if(posx!=0XFF)gpsx->slmsg[slx].azideg=NMEA_Str2num(p1+posx,&dx);//得到卫星方位角else break; posx=NMEA_Comma_Pos(p1,7+j*4);if(posx!=0XFF)gpsx->slmsg[slx].sn=NMEA_Str2num(p1+posx,&dx); //得到卫星信噪比else break;slx++; } p=p1+1;//切换到下一个GPGSV信息}
}
//分析GPGGA信息
//gpsx:nmea信息结构体
//buf:接收到的GPS数据缓冲区首地址
void NMEA_GPGGA_Analysis(nmea_msg *gpsx,u8 *buf)
{u8 *p1,dx; u8 posx; p1=(u8*)strstr((const char *)buf,"$GPGGA");posx=NMEA_Comma_Pos(p1,6); //得到GPS状态if(posx!=0XFF)gpsx->gpssta=NMEA_Str2num(p1+posx,&dx); posx=NMEA_Comma_Pos(p1,7); //得到用于定位的卫星数if(posx!=0XFF)gpsx->posslnum=NMEA_Str2num(p1+posx,&dx); posx=NMEA_Comma_Pos(p1,9); //得到海拔高度if(posx!=0XFF)gpsx->altitude=NMEA_Str2num(p1+posx,&dx);
}
//分析GPGSA信息
//gpsx:nmea信息结构体
//buf:接收到的GPS数据缓冲区首地址
void NMEA_GPGSA_Analysis(nmea_msg *gpsx,u8 *buf)
{u8 *p1,dx; u8 posx; u8 i; p1=(u8*)strstr((const char *)buf,"$GPGSA");posx=NMEA_Comma_Pos(p1,2); //得到定位类型if(posx!=0XFF)gpsx->fixmode=NMEA_Str2num(p1+posx,&dx); for(i=0;i<12;i++) //得到定位卫星编号{posx=NMEA_Comma_Pos(p1,3+i); if(posx!=0XFF)gpsx->possl[i]=NMEA_Str2num(p1+posx,&dx);else break; } posx=NMEA_Comma_Pos(p1,15); //得到PDOP位置精度因子if(posx!=0XFF)gpsx->pdop=NMEA_Str2num(p1+posx,&dx); posx=NMEA_Comma_Pos(p1,16); //得到HDOP位置精度因子if(posx!=0XFF)gpsx->hdop=NMEA_Str2num(p1+posx,&dx); posx=NMEA_Comma_Pos(p1,17); //得到VDOP位置精度因子if(posx!=0XFF)gpsx->vdop=NMEA_Str2num(p1+posx,&dx);
}
//分析GPRMC信息
//gpsx:nmea信息结构体
//buf:接收到的GPS数据缓冲区首地址
void NMEA_GPRMC_Analysis(nmea_msg *gpsx,u8 *buf)
{u8 *p1,dx; u8 posx; u32 temp; float rs; p1=(u8*)strstr((const char *)buf,"GPRMC");//"$GPRMC",经常有&和GPRMC分开的情况,故只判断GPRMC.posx=NMEA_Comma_Pos(p1,1); //得到UTC时间if(posx!=0XFF){temp=NMEA_Str2num(p1+posx,&dx)/NMEA_Pow(10,dx); //得到UTC时间,去掉msgpsx->utc.hour=temp/10000;gpsx->utc.min=(temp/100)%100;gpsx->utc.sec=temp%100; } posx=NMEA_Comma_Pos(p1,3); //得到纬度if(posx!=0XFF){temp=NMEA_Str2num(p1+posx,&dx); gpsx->latitude=temp/NMEA_Pow(10,dx+2); //得到°rs=temp%NMEA_Pow(10,dx+2); //得到' gpsx->latitude=gpsx->latitude*NMEA_Pow(10,5)+(rs*NMEA_Pow(10,5-dx))/60;//转换为° }posx=NMEA_Comma_Pos(p1,4); //南纬还是北纬 if(posx!=0XFF)gpsx->nshemi=*(p1+posx); posx=NMEA_Comma_Pos(p1,5); //得到经度if(posx!=0XFF){ temp=NMEA_Str2num(p1+posx,&dx); gpsx->longitude=temp/NMEA_Pow(10,dx+2); //得到°rs=temp%NMEA_Pow(10,dx+2); //得到' gpsx->longitude=gpsx->longitude*NMEA_Pow(10,5)+(rs*NMEA_Pow(10,5-dx))/60;//转换为° }posx=NMEA_Comma_Pos(p1,6); //东经还是西经if(posx!=0XFF)gpsx->ewhemi=*(p1+posx); posx=NMEA_Comma_Pos(p1,9); //得到UTC日期if(posx!=0XFF){temp=NMEA_Str2num(p1+posx,&dx); //得到UTC日期gpsx->utc.date=temp/10000;gpsx->utc.month=(temp/100)%100;gpsx->utc.year=2000+temp%100; }
}
//分析GPVTG信息
//gpsx:nmea信息结构体
//buf:接收到的GPS数据缓冲区首地址
void NMEA_GPVTG_Analysis(nmea_msg *gpsx,u8 *buf)
{u8 *p1,dx; u8 posx; p1=(u8*)strstr((const char *)buf,"$GPVTG"); posx=NMEA_Comma_Pos(p1,7); //得到地面速率if(posx!=0XFF){gpsx->speed=NMEA_Str2num(p1+posx,&dx);if(dx<3)gpsx->speed*=NMEA_Pow(10,3-dx); //确保扩大1000倍}
}
//提取NMEA-0183信息
//gpsx:nmea信息结构体
//buf:接收到的GPS数据缓冲区首地址
void GPS_Analysis(nmea_msg *gpsx,u8 *buf)
{NMEA_GPGSV_Analysis(gpsx,buf); //GPGSV解析NMEA_GPGGA_Analysis(gpsx,buf); //GPGGA解析 NMEA_GPGSA_Analysis(gpsx,buf); //GPGSA解析NMEA_GPRMC_Analysis(gpsx,buf); //GPRMC解析NMEA_GPVTG_Analysis(gpsx,buf); //GPVTG解析
}
NMEA-0183 协议都是以类似$ GPGSV 的开头,而且都会以‘*’作为有效数据的结尾,就可以通过数逗号的方法,来解析数据了。本代码实现了对 NMEA-0183 协议的 $ GPGGA、$ GPGSA、$ GPGSV、 $ GPRMC 和$ GPVTG 等 5 类帧的解析
3. gps_cfg.c
GPS模块配置部分
//GPS校验和计算
//buf:数据缓存区首地址
//len:数据长度
//cka,ckb:两个校验结果.
void Ublox_CheckSum(u8 *buf,u16 len,u8* cka,u8*ckb)
{u16 i;*cka=0;*ckb=0;for(i=0;i<len;i++){*cka=*cka+buf[i];*ckb=*ckb+*cka;}
}//检查CFG配置执行情况
//返回值:0,ACK成功
// 1,接收超时错误
// 2,没有找到同步字符
// 3,接收到NACK应答
u8 Ublox_Cfg_Ack_Check(void)
{ u16 len=0,i;u8 rval=0;while((USART3_RX_STA&0X8000)==0 && len<100)//等待接收到应答 {len++;delay_ms(5);} if(len<250) //超时错误.{len=USART3_RX_STA&0X7FFF; //此次接收到的数据长度 for(i=0;i<len;i++)if(USART3_RX_BUF[i]==0XB5)break;//查找同步字符 0XB5if(i==len)rval=2; //没有找到同步字符else if(USART3_RX_BUF[i+3]==0X00)rval=3;//接收到NACK应答else rval=0; //接收到ACK应答}else rval=1; //接收超时错误USART3_RX_STA=0; //清除接收return rval;
}
//配置保存
//将当前配置保存在外部EEPROM里面
//返回值:0,执行成功;1,执行失败.
u8 Ublox_Cfg_Cfg_Save(void)
{u8 i;_ublox_cfg_cfg *cfg_cfg=(_ublox_cfg_cfg *)USART3_TX_BUF;cfg_cfg->header=0X62B5; //cfg headercfg_cfg->id=0X0906; //cfg cfg idcfg_cfg->dlength=13; //数据区长度为13个字节. cfg_cfg->clearmask=0; //清除掩码为0cfg_cfg->savemask=0XFFFF; //保存掩码为0XFFFFcfg_cfg->loadmask=0; //加载掩码为0 cfg_cfg->devicemask=4; //保存在EEPROM里面 Ublox_CheckSum((u8*)(&cfg_cfg->id),sizeof(_ublox_cfg_cfg)-4,&cfg_cfg->cka,&cfg_cfg->ckb);Ublox_Send_Date((u8*)cfg_cfg,sizeof(_ublox_cfg_cfg));//发送数据给NEO-6M for(i=0;i<6;i++)if(Ublox_Cfg_Ack_Check()==0)break; //EEPROM写入需要比较久时间,所以连续判断多次return i==6?1:0;
}
//配置NMEA输出信息格式
//msgid:要操作的NMEA消息条目,具体见下面的参数表
// 00,GPGGA;01,GPGLL;02,GPGSA;
// 03,GPGSV;04,GPRMC;05,GPVTG;
// 06,GPGRS;07,GPGST;08,GPZDA;
// 09,GPGBS;0A,GPDTM;0D,GPGNS;
//uart1set:0,输出关闭;1,输出开启.
//返回值:0,执行成功;其他,执行失败.
u8 Ublox_Cfg_Msg(u8 msgid,u8 uart1set)
{_ublox_cfg_msg *cfg_msg=(_ublox_cfg_msg *)USART3_TX_BUF;cfg_msg->header=0X62B5; //cfg headercfg_msg->id=0X0106; //cfg msg idcfg_msg->dlength=8; //数据区长度为8个字节. cfg_msg->msgclass=0XF0; //NMEA消息cfg_msg->msgid=msgid; //要操作的NMEA消息条目cfg_msg->iicset=1; //默认开启cfg_msg->uart1set=uart1set; //开关设置cfg_msg->uart2set=1; //默认开启cfg_msg->usbset=1; //默认开启cfg_msg->spiset=1; //默认开启cfg_msg->ncset=1; //默认开启 Ublox_CheckSum((u8*)(&cfg_msg->id),sizeof(_ublox_cfg_msg)-4,&cfg_msg->cka,&cfg_msg->ckb);Ublox_Send_Date((u8*)cfg_msg,sizeof(_ublox_cfg_msg));//发送数据给NEO-6M return Ublox_Cfg_Ack_Check();
}
//配置NMEA输出信息格式
//baudrate:波特率,4800/9600/19200/38400/57600/115200/230400
//返回值:0,执行成功;其他,执行失败(这里不会返回0了)
u8 Ublox_Cfg_Prt(u32 baudrate)
{_ublox_cfg_prt *cfg_prt=(_ublox_cfg_prt *)USART3_TX_BUF;cfg_prt->header=0X62B5; //cfg headercfg_prt->id=0X0006; //cfg prt idcfg_prt->dlength=20; //数据区长度为20个字节. cfg_prt->portid=1; //操作串口1cfg_prt->reserved=0; //保留字节,设置为0cfg_prt->txready=0; //TX Ready设置为0cfg_prt->mode=0X08D0; //8位,1个停止位,无校验位cfg_prt->baudrate=baudrate; //波特率设置cfg_prt->inprotomask=0X0007;//0+1+2cfg_prt->outprotomask=0X0007;//0+1+2cfg_prt->reserved4=0; //保留字节,设置为0cfg_prt->reserved5=0; //保留字节,设置为0 Ublox_CheckSum((u8*)(&cfg_prt->id),sizeof(_ublox_cfg_prt)-4,&cfg_prt->cka,&cfg_prt->ckb);Ublox_Send_Date((u8*)cfg_prt,sizeof(_ublox_cfg_prt));//发送数据给NEO-6M delay_ms(200); //等待发送完成 usart3_init(baudrate); //重新初始化串口3 return Ublox_Cfg_Ack_Check();//这里不会反回0,因为UBLOX发回来的应答在串口重新初始化的时候已经被丢弃了.
}
//配置UBLOX NEO-6的时钟脉冲输出
//interval:脉冲间隔(us)
//length:脉冲宽度(us)
//status:脉冲配置:1,高电平有效;0,关闭;-1,低电平有效.
//返回值:0,发送成功;其他,发送失败.
u8 Ublox_Cfg_Tp(u32 interval,u32 length,signed char status)
{_ublox_cfg_tp *cfg_tp=(_ublox_cfg_tp *)USART3_TX_BUF;cfg_tp->header=0X62B5; //cfg headercfg_tp->id=0X0706; //cfg tp idcfg_tp->dlength=20; //数据区长度为20个字节.cfg_tp->interval=interval; //脉冲间隔,uscfg_tp->length=length; //脉冲宽度,uscfg_tp->status=status; //时钟脉冲配置cfg_tp->timeref=0; //参考UTC 时间cfg_tp->flags=0; //flags为0cfg_tp->reserved=0; //保留位为0cfg_tp->antdelay=820; //天线延时为820nscfg_tp->rfdelay=0; //RF延时为0nscfg_tp->userdelay=0; //用户延时为0nsUblox_CheckSum((u8*)(&cfg_tp->id),sizeof(_ublox_cfg_tp)-4,&cfg_tp->cka,&cfg_tp->ckb);Ublox_Send_Date((u8*)cfg_tp,sizeof(_ublox_cfg_tp));//发送数据给NEO-6M return Ublox_Cfg_Ack_Check();
}
//配置UBLOX NEO-6的更新速率
//measrate:测量时间间隔,单位为ms,最少不能小于200ms(5Hz)
//reftime:参考时间,0=UTC Time;1=GPS Time(一般设置为1)
//返回值:0,发送成功;其他,发送失败.
u8 Ublox_Cfg_Rate(u16 measrate,u8 reftime)
{_ublox_cfg_rate *cfg_rate=(_ublox_cfg_rate *)USART3_TX_BUF;if(measrate<200)return 1; //小于200ms,直接退出cfg_rate->header=0X62B5; //cfg headercfg_rate->id=0X0806; //cfg rate idcfg_rate->dlength=6; //数据区长度为6个字节.cfg_rate->measrate=measrate;//脉冲间隔,uscfg_rate->navrate=1; //导航速率(周期),固定为1cfg_rate->timeref=reftime; //参考时间为GPS时间Ublox_CheckSum((u8*)(&cfg_rate->id),sizeof(_ublox_cfg_rate)-4,&cfg_rate->cka,&cfg_rate->ckb);Ublox_Send_Date((u8*)cfg_rate,sizeof(_ublox_cfg_rate));//发送数据给NEO-6M return Ublox_Cfg_Ack_Check();
}
//发送一批数据给Ublox NEO-6M,这里通过串口3发送
//dbuf:数据缓存首地址
//len:要发送的字节数
void Ublox_Send_Date(u8* dbuf,u16 len)
{u16 j;for(j=0;j<len;j++)//循环发送数据{while((USART3->SR&0X40)==0);//循环发送,直到发送完毕 USART3->DR=dbuf[j]; }
}
UBX 协议控制部分,此部分我们只实现了 NEO-6M 模组常用的 5 个配置:保存设置、输出信息设置、串口波特率设置、时钟脉冲设置和输出频率设置。
4. 主函数测试
u8 USART1_TX_BUF[USART3_MAX_RECV_LEN]; //串口1,发送缓存区
nmea_msg gpsx; //GPS信息
__align(4) u8 dtbuf[50]; //打印缓存器
const u8*fixmode_tbl[4]={"Fail","Fail"," 2D "," 3D "}; //fix mode字符串 //显示GPS定位信息
void Gps_Msg_Show(void)
{float tp; POINT_COLOR=BLUE; tp=gpsx.longitude; printf("Longitude:%.5f %1c ",tp/=100000,gpsx.ewhemi); //得到经度字符串tp=gpsx.latitude; printf("Latitude:%.5f %1c ",tp/=100000,gpsx.nshemi); //得到纬度字符串tp=gpsx.altitude; printf("Altitude:%.1fm ",tp/=10); //得到高度字符串tp=gpsx.speed; printf("Speed:%.3fkm/h ",tp/=1000); //得到速度字符串 if(gpsx.fixmode<=3) //定位状态{ printf("Fix Mode:%s",fixmode_tbl[gpsx.fixmode]); } printf("Valid satellite:%02d",gpsx.posslnum); //用于定位的卫星数printf("Visible satellite:%02d",gpsx.svnum%100); //可见卫星数printf("UTC Date:%04d/%02d/%02d ",gpsx.utc.year,gpsx.utc.month,gpsx.utc.date); //显示UTC日期printf("UTC Time:%02d:%02d:%02d ",gpsx.utc.hour,gpsx.utc.min,gpsx.utc.sec); //显示UTC时间
} int main(void)
{ u16 i,rxlen;u16 lenx;u8 key=0XFF;u8 upload=0;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2delay_init(168); //初始化延时函数uart_init(115200); //初始化串口波特率为115200 usart3_init(38400); //初始化串口3波特率为38400
// usmart_dev.init(84); //初始化USMART LED_Init(); //初始化LEDKEY_Init(); //初始化按键usmart_dev.init(72); //初始化USMART if(Ublox_Cfg_Rate(1000,1)!=0) //设置定位信息更新速度为1000ms,顺便判断GPS模块是否在位. {printf("NEO-6M Setting...");while((Ublox_Cfg_Rate(1000,1)!=0)&&key) //持续判断,直到可以检查到NEO-6M,且数据保存成功{usart3_init(9600); //初始化串口3波特率为9600(EEPROM没有保存数据的时候,波特率为9600.)Ublox_Cfg_Prt(38400); //重新设置模块的波特率为38400usart3_init(38400); //初始化串口3波特率为38400Ublox_Cfg_Tp(1000000,100000,1); //设置PPS为1秒钟输出1次,脉冲宽度为100ms key=Ublox_Cfg_Cfg_Save(); //保存配置 } printf("NEO-6M Set Done!!");}while(1) { delay_ms(1);if(USART3_RX_STA&0X8000) //接收到一次数据了{rxlen=USART3_RX_STA&0X7FFF; //得到数据长度for(i=0;i<rxlen;i++)USART1_TX_BUF[i]=USART3_RX_BUF[i]; USART3_RX_STA=0; //启动下一次接收USART1_TX_BUF[i]=0; //自动添加结束符GPS_Analysis(&gpsx,(u8*)USART1_TX_BUF);//分析字符串Gps_Msg_Show(); //显示信息 if(upload)printf("\r\n%s\r\n",USART1_TX_BUF);//发送接收到的数据到串口1}key=KEY_Scan(0);if(key==KEY0_PRES){upload=!upload;POINT_COLOR=RED;if(upload)printf("NMEA Data Upload:ON ");else printf("NMEA Data Upload:OFF");}if((lenx%500)==0)LED0=!LED0; lenx++; }
}