液压控制系统的simulink搭建
- 1.液压传动系统的优点
- 2.液压系统动态性能的主要问题
- 3.研究液压控制系统的动态性能的主要方法
- 4.液压控制系统的建模
- (1)基本的液压系统模型
- (2)建模方法
- (3)基本过程
- 5.液压控制系统的数学描述
- 1.基本容性元件
- (1)质量守恒方程
- (2)能量守恒方程
- 2.基本阻性元件
- (1)压力-流量方程
- (2)能量损失方程
- 6.液压位置控制系统的组成和工作原理
- 1.液压位置控制系统传递函数建模
- 2.液压控制系统simscape建模
1.液压传动系统的优点
<1>易于控制,控制精度较高。
<2>理想的增力系统。容易实现增大力和增大力矩。
<3>输出恒定的力和扭矩。利用传感器和闭环控制,可以提供恒定的力和力矩。
<4>实现复合传动和控制。使用一个动力源可以实现负载的各种运动(直线或旋转),可以通过串并联驱动多个负载。
<5>具有负载敏感的特性。压力取决于负载。
<6>控制系统平稳,冲击小。液压油能缓冲,减小阻尼和噪声。
<7>简单,安全经济。
2.液压系统动态性能的主要问题
<1>液压系统的稳定性问题。管道中压力过大时,产生冲击后,动态系统能否快准稳的达到新的平衡状态。
<2>液压系统过渡的品质问题。到达新的平衡的过程中的执行控制机构的调整时间,峰值时间,震荡次数,元件位 移和速度等。
3.研究液压控制系统的动态性能的主要方法
<1>传递函数分析法。建立系统数学模型,线性化,拉氏变换,写出传递函数,画出 b o d e bode bode图,确定系统响应特性。
<2>液压系统模拟仿真法。模拟计算机和电路进行液压系统的动态特性的模拟分析。
<3>数字仿真法。利用现代控制理论研究液压系统动态性能的研究方法。建立空间状态方程,求出动态过程时域 解。常用的软件有 A M E S i m , E a s y 5 AMESim,Easy5 AMESim,Easy5。
4.液压控制系统的建模
(1)基本的液压系统模型
<1>动力学模型
<2>热力学模型
(2)建模方法
<1>理论法。已知的定理定律和数学工具推出内在液压系统的内在数学规律的数学模型。
<2>实验法。借助试验数据得到数学模型。再进行分析。
(3)基本过程
<1>划分子系统
<2>建立子系统基本模型
<3>系统建模
5.液压控制系统的数学描述
系统的动态模型用微分方程描述,最核心的是描述液压动态特性的微分方程组。由液压系统元件的微分方程实现。下面罗列基本元件的微分方程。
1.基本容性元件
(1)质量守恒方程
d p d t = β T [ 1 ρ V ( d m d t − ρ d V d t ) + α T d T d t ] \frac{dp}{dt}=\beta_T[\frac{1}{\rho V}(\frac{dm}{dt}-\rho\frac{dV}{dt})+\alpha_T\frac{dT}{dt}] dtdp=βT[ρV1(dtdm−ρdtdV)+αTdtdT]
(2)能量守恒方程
d T d t = 1 c p m [ ∑ m ˙ i n c ‾ p ( T i n − T ) − H ( T − T a ) + Q ˙ f − W ˙ s + T α V d p d t ] \frac{dT}{dt}=\frac{1}{c_pm}[\sum\dot{m}_{in} \overline{c}_p(T_{in}-T)-H(T-T_a)+\dot{Q}_f-\dot{W}_s+T\alpha V\frac{dp}{dt}] dtdT=cpm1[∑m˙incp(Tin−T)−H(T−Ta)+Q˙f−W˙s+TαVdtdp]
2.基本阻性元件
(1)压力-流量方程
m ˙ = k ρ A Δ p n \dot{m}=k\rho A\Delta p^n m˙=kρAΔpn
(2)能量损失方程
d m ˙ d t = A ( p 1 − p 2 ) L − f m ˙ ∣ m ˙ ∣ 2 ρ A D h \frac{d\dot{m}}{dt}=\frac{A(p_1-p_2)}{L}-f\frac{\dot{m}|\dot{m}|}{2\rho A D_h} dtdm˙=LA(p1−p2)−f2ρADhm˙∣m˙∣
流体体积 V V V,质量流量 m ˙ \dot{m} m˙,功率损失热流量 Q ˙ f \dot{Q}_f Q˙f,轴功率 W ˙ s \dot{W}_s W˙s。对于其他的元件不做过多的描述。
6.液压位置控制系统的组成和工作原理
如图是一个双电位器的液压位置控制系统。由一个三位四通电磁换向阀控制液压缸活塞杆位置的闭环控制系统。

1.液压位置控制系统传递函数建模
将传感器即反馈电位计视为比例环节,反馈系数为 K f K_f Kf。差分放大器为电压反馈放大器,放大器的输出电流 i i i与位置偏差信号 e ϵ e_{\epsilon} eϵ,放大器与线圈的增益为 K a K_a Ka,传感器传递函数惯性环节描述如下:
I ( s ) E a ( s ) = K a s ω a + 1 \frac{I(s)}{E_a(s)} = \frac{K_a}{\frac{s}{\omega_a}+1} Ea(s)I(s)=ωas+1Ka
ω a : \omega_a: ωa:线圈转折频率, R c R_c Rc为线圈电阻, r p r_p rp为放大器内阻和线圈内阻之和, L c L_c Lc为线圈电感。
ω c = R c + r p L c \omega_c = \frac{R_c+r_p}{L_c} ωc=LcRc+rp
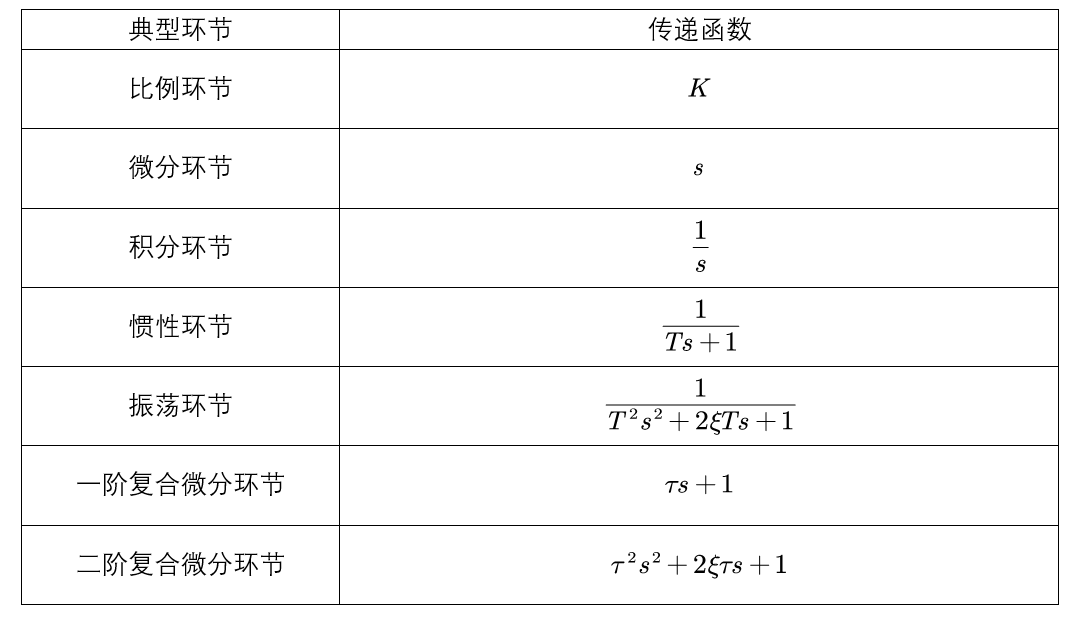
将电液伺服机构的传递函数近似为二阶环节,惯性环节或比例环节。
控制电流 I I I与电磁阀输出流量 Q Q Q间的传递函数用二阶振荡环节近似描述:
Q ( s ) I ( s ) = K a v s 2 ω a v 2 + 2 ξ a v ω a v s + 1 \frac{Q(s)}{I(s)} = \frac{K_{av}}{\frac{s^2}{\omega_{av}^2}+\frac{2\xi_{av}}{\omega_{av}}s+1} I(s)Q(s)=ωav2s2+ωav2ξavs+1Kav
如果液压动力机构的固有频率较低,那么电液伺服换向机构的传递函数可用一阶惯性环节描述。
Q ( s ) I ( s ) = K a v T a v s + 1 \frac{Q(s)}{I(s)} = \frac{K_{av}}{T_{av}s+1} I(s)Q(s)=Tavs+1Kav
如果电液伺服的固有频率较高,那么液压动力机构的固有频率较低时,换向机构的传递函数可用一阶惯性环节描述。
Q ( s ) I ( s ) = K a v \frac{Q(s)}{I(s)} = K_{av} I(s)Q(s)=Kav
当液压系统没有弹性负载时,阀控液压缸动力机构中液压阀活塞杆位移 Y ( s ) Y(s) Y(s)与电磁伺服换向阀输出流量间的传递函数(无外力作用下的情况)为:
Y ( s ) Q ( s ) = 1 A × 1 s ( s 2 ω h 2 + 2 ξ h ω h s + 1 ) \frac{Y(s)}{Q(s)} = \frac{1}{A}\times\frac{1}{s(\frac{s^2}{\omega_h^2}+\frac{2\xi_h}{\omega_h}s+1)} Q(s)Y(s)=A1×s(ωh2s2+ωh2ξhs+1)1
再用simulink画出框图即可:

2.液压控制系统simscape建模
用的是 s i m u l i n k simulink simulink的 S i m H y d r a u l i c s SimHydraulics SimHydraulics模块。具体的模块简介如下:
A c c u m u l a t o r s Accumulators Accumulators:储能器。 H y d r a u l i c C y l i n d e r s Hydraulic Cylinders HydraulicCylinders:液压缸。 H y d r a u l i c U t i l i t i e s Hydraulic Utilities HydraulicUtilities:液压通用件。 L o c a l H y d r a u l i c R e s i s t a n c e s LocalHydraulicResistances LocalHydraulicResistances:局部液压管接头。 O r i f i c e Orifice Orifice:节流器。 P i p e l i n e s Pipelines Pipelines:调速阀。
P u m p s Pumps Pumps a n d and and M o t o r s Motors Motors:泵和马达。 V a l v e s Valves Valves:阀。

i s t a n c e s istances istances:局部液压管接头。 O r i f i c e Orifice Orifice:节流器。 P i p e l i n e s Pipelines Pipelines:调速阀。
P u m p s Pumps Pumps a n d and and M o t o r s Motors Motors:泵和马达。 V a l v e s Valves Valves:阀。
建立起来的 s i m s c a p e simscape simscape图如下:

速度时域图像:

位移时域图像:

相关的闭环控制系统后面再描述。