点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达鱼眼镜头是一种极端的广角镜头,也称为全景镜头。鱼眼镜头通过引入桶形畸变,强行的压缩大范围空间,从而获得视角大于180°,甚至达到 270°以上的超广角成像,因此采用鱼眼镜头会给光学摄影者带来强烈的视觉冲击感。
1. 鱼眼镜头的发展与工作原理
人们最初是从对水下鱼眼简单的模仿开始着手设计鱼眼镜头。第一个模仿水
下鱼眼仰视水面之上的现象的装置是一台广角摄影机,它是由R.W.Wood将一块玻璃板盖在一个装满水的容器上而实现的。如图1所示:
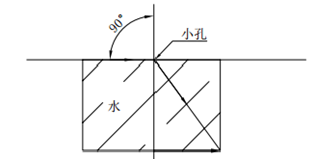
图1
1922 年,W.N.Bond 对Wood 的装置进行了改进,这种设计模仿了水下鱼眼仰视水面之上半球空域的状态,只要适当的调整空气间隔和光屏上孔的大小,就能获得清晰的广角成像。但是它有严重的色差,且相对照度低。如图2所示:
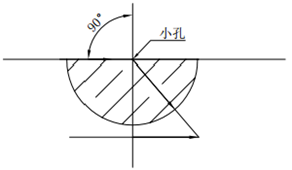
图2
后续,考虑到 W.N.Bond 的装置在成像上的不足,R.Hill 对其设计进行改进,主要加入了一个负弯月形透镜,因为有第一片负透镜的作用,使较大入射角的光线与光轴夹角减小,从而将光学系统像差校正的难度大大的降低了。如图3所示:
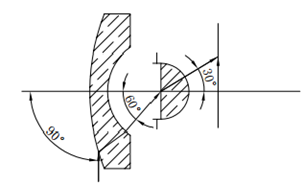
图3
1924 年,Conrad Beck 在 R.Hill的设计基础上又进行了改进。该鱼眼镜头是在 R.Hill 设计的基础上把平凸透镜换变成一个凹透镜和一个凸透镜的组合,该光学系统得到了成像质量较好和照度均匀的像面。如图4所示:
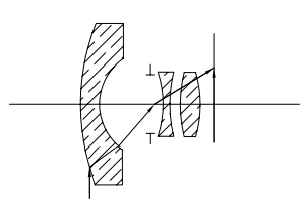
图4
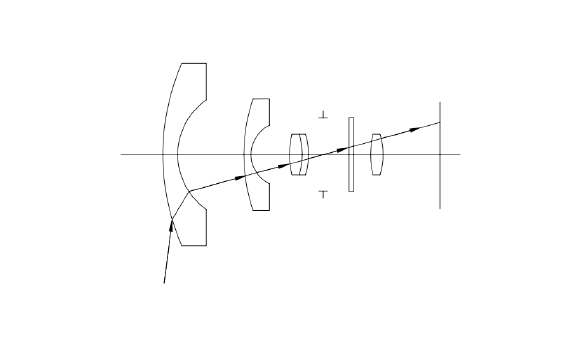
1932 年,一款全新的鱼眼镜头诞生,这款鱼眼镜头以两个负弯月形透镜作为前组,进一步减小了大视场光线进入后组光学系统的倾角,有利于后续的成像。另外,该光学系统在孔径光阑前加入双胶合透镜,在光阑后方又加入了平面玻璃片,这样使得整个光学系统的结构参数自变量增多,成像质量更好。如图5所示:
图5
鱼眼镜头的启示来源于水中的鱼贴近水面时仰望天空的情况,当水中的鱼贴近水面观察时,视场角能达到180左右,这种现象在光学原理中可以用全反射和光路可逆原理来解释。
根据光路可逆原理,贴近水面入射的光线,将会以等于折射角的角度进入水面,。根据以上可以理解,水中的鱼在贴近水面时,能看到水面上方 180°角范围的景物。
如图6(b),将鱼眼晶状体和光学介质当成一个光学结构整体,其晶状体前表面与水平面构成一个以水为介质的平负透镜,如果用高折射率的光学材料替代水介质,并构成一种光学透镜,则有可能在水上实现大范围成像的功能。
如图6(b)所示,为了进一步扩大视场角,将平凸透镜的前表面改进为凸面并
且相应增大后曲面的曲率,保证其光焦度变化量不大,来形成一个弯月形的透镜。
如图6(c)所示,从上面的演化结果可以看出,鱼眼镜头的第一片镜片都是类似抛物线形向外凸出非常多的负透镜。
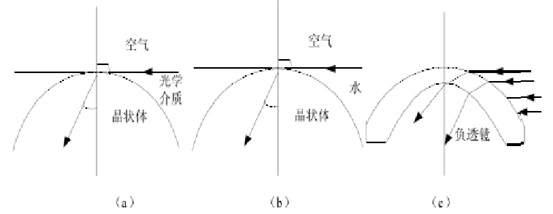
图6:鱼眼仰视的演化
鱼眼镜头的第 1 透镜具有很大的负光焦度,这决定了鱼眼镜头光学系统必然具有反摄远型物镜结构,前组为负光焦度,后组为正光焦度。
如图7为反摄远型物镜的基本结构,同时也是鱼眼镜头光学系统基本结构简化图。
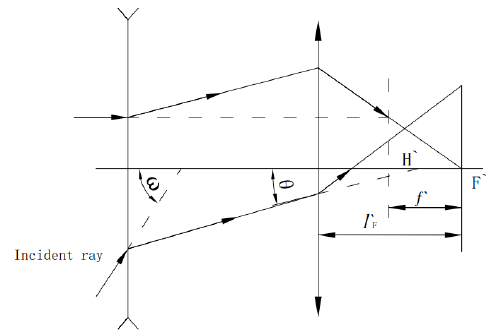
图7:反摄远型物镜基本结构
反摄远型物镜的基本结构,使得光学系统的后工作距离比同焦距不同类型镜头大得多。在实际应用中,正好需要鱼眼镜头有着足够大的后工作距离。
这种反摄远型物镜的基本结构使得入射光线经过第1透镜后,光线与光轴会有较小的夹角,更有利于后面的透镜组元结构的设计,且使全系统的像差校正更顺利。
2. 鱼眼镜头基本结构的像差校正
2.1 色差校正
根据薄透镜系统的初级色差理论,单透镜组成的反摄远型物镜无法同时校正两种色差。
为了同时校正这两种色差,可以使用双胶合透镜取代单透镜,并让每个双胶合透镜各自独立地校正色差,这样,整个系统也就消除色差了。
2.2场曲校正
根据初级像差理论,两组相互远离的薄透镜系统能达到校正场曲的效果。
按照薄透镜系统初级场曲公式,选择合适的透镜的材料和光焦度,就能保证场曲为零。
2.3 其他像差的校正
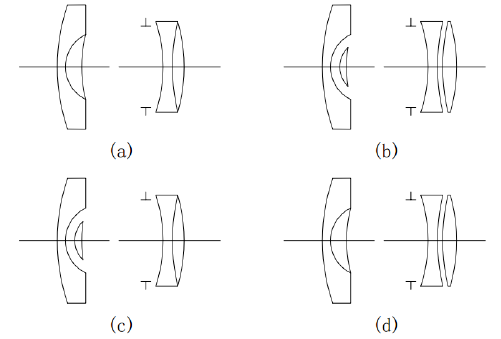
图8:消除初级像差的反摄远型薄透镜系统
由于一个薄透镜组可以消除两种单色像差,所以图8所示的两个互相远离的薄透镜组可以校正四种单色像差。如果让前后组的光焦度分配满足消场曲条件,则图8所示的系统可以校正所有的初级像差,其中包括五种单色像差和两种色差。因此,图8所示的结构是能校正全部初级像差的基本结构。
由于鱼眼镜头的视场角和相对孔径都很大,保证其初级像差得到全面的校正,即意味着它对小视场和小相对孔径范围内的光束具有优良的成像质量,这是是保证鱼眼镜头像质优良的必要条件。
3. 鱼眼镜头“非相似”成像原理
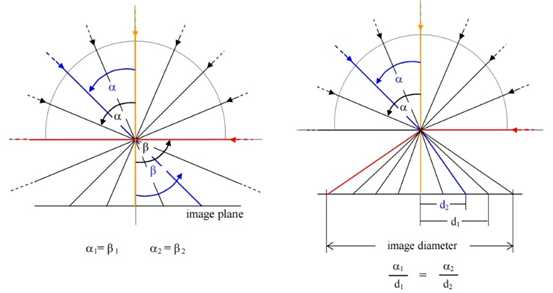
图9:相似成像和非相似成像对比图
普通的光学系统成像准则为“相似”成像,而鱼眼镜头是将半球形的物面成像为平面,“相似”成像不能实现,只能采用“非相似”成像思想。如图9为相似成像和非相似成像对比图。在传统光学原理中,由高斯原理可知,成像视角的受到限制。而非相似成像的思想突破了成像的局限性,在直径空间上进行压缩,以实现广角成像。
根据“非相似”成像思想,鱼眼镜头的成像模型有:
3.1 体视投影模型
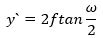
式中,y′为理想像高度;f 为光学系统物方焦距;ω 为物方半视场角。
体视模型相比之下畸变最小,球形物面上的微小面元经过体视投影后,其像仍然是一个小圆。所以体视投影对微小物体成像有相似性。但正是这种成像的相似性,使得该投影方式不能提供足够的桶形畸变,影响成像视场。
3.2 等距投影模型

式中,y′为理想像高度;f 为光学系统物方焦距;ω 为物方半视场角。
“等距投影”成像能够产生足够的“桶形”畸变,使得大视场范围的场景得以压缩成像,它能保证鱼眼镜头对超半球角空域的目标性信息的提取。
由于等距投影模型便于计算,因此被广泛应用。
3.3 等立体角投影模型
式中,y′为理想像高度;f 为光学系统物方焦距;ω 为物方半视场角。
“等立体角投影”表达的是像面上的面与物方上的立体角之间是正比的关系。
可见,物方上相同大小的立体角在像面上投影成同样的面积大小。
等立体角投影是一种实用性的成像思想,一般用于艺术摄影、风景照相等民用方面。
3.4 正交投影模型

式中,y′为理想像高度;f 为光学系统物方焦距;ω 为物方半视场角。
正交投影中径向和切线方向的放大率不同,当视场角为 90°时,径向放大率为 0,即半球形的物面的边缘图像经过该投影成像后,将会形成一条直线。
正交投影能提供更大的桶形畸变量,更有利于视场角的扩大,同时画面照度分布的均匀性也会相应提高,但在现实中比较少的应用。
以上四种鱼眼镜头的成像模型都可以表示鱼眼镜头成像的物-像映射关系。
鱼眼镜头所成的像会存在不同程度的“变形压缩”,以此来覆盖物方空间的立体角。相对于高斯光学中的理想成像原理而言,这些模型的“桶形”畸变量慢慢增大,但从物面到像面二者之间依旧存在相互对应的映射关系。这就从原理上保证了“非相似”成像思想的正确性和可行性。
参考资料:
《车载全景鱼眼镜头的设计与制造_刘言》
本文仅做学术分享,如有侵权,请联系删文。
好消息!
小白学视觉知识星球
开始面向外开放啦👇👇👇

下载1:OpenCV-Contrib扩展模块中文版教程在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。交流群欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~